USING ROBOTS TO ACCESS PLAY AT DIFFERENT DEVELOPMENTAL LEVELS FOR CHILDREN WITH SEVERE DISABILITIES: A PILOT STUDY
Kim Adams1, 2, Adriana Rios1, 3, Lina Becerra1, 4, Paola Esquivel1, 4
1 Faculty of Rehabilitation Medicine, University of Alberta, Edmonton, AB, Canada
2 Glenrose Rehabilitation Hospital, Edmonton, AB, Canada
3 Universidad del Rosario, Bogotá, Colombia
4 Universidad Nacional de Colombia, Bogotá, Colombia
ABSTRACT
Children who have severe physical disabilities may have difficulty participating in play activities. The use of robots can promote and facilitate play for children with disabilities. Robot play could give insight to the developmental level of play of children with disabilities who are difficult to assess with standardized tests. The purpose of this study was to develop scenarios with and without a robot where children could demonstrate play at different developmental levels. Validation of the scenarios was done through direct observation of 10 typically developing children playing with and without a robot with conventional toys and unstructured materials. A play coding system was used to classify the levels of play (no play, functional play or pretend play). Analysis showed that the scenarios could elicit play as expected (young children did more functional play and older children did more pretend play). However, children presented less pretend play with the robot than they did without the robot. This could be because typically developing children are accustomed to manipulating toys directly and the robot posed a higher level of cognitive difficulty. Next steps will be to address the effect of the robot, and trial the scenarios with children with disabilities.
BACKGROUND
Children’s development through play occurs naturally and it is the ideal way to discover the world through practice with different objects and experiences. The main types of play that can be observed in children younger than 8 years old are functional play and pretend play. Functional play is characterized by repetitive movements or actions that the child performs for the pleasure of exerting an impact on the toys (for example to build a tower of blocks and then knock them down). On the other hand, pretend play is make-believe play where children use toys in imaginative ways. When children participate in pretend play they develop creativity, humor and originality in problem solving (Ferland, 2005).
Children with severe physical disabilities such as cerebral palsy (CP) have motor control problems that affect manipulation of objects due to difficulties with gross and fine motor skills. Children with CP have difficulties reaching high levels of play such as pretend and symbolic play (Pfeifer, Pacciulio, Dos Santos, & Dos santos, 2011). Generally, these children have limitations that affect engagement in play and tend to be observers of other’s play rather than active participants in play (Blanche 2008). This reduces their opportunity to participate in play and develop skills acquired through the exploration of objects and the environment around them.
Robots can facilitate discovery and enhance opportunities for play, learning and cognitive development in children who have motor disabilities. Using a robot to control play enhances participation and interest for the child and is effective in providing a means for children to play and demonstrate cognitive skills (Cook, Adams, & Encarnacão, 2010). Rios (2014) used the Test of Playfulness (ToP) to evaluate how the robot can influence play of children with severe motor impairment due to cerebral palsy. She noted that playfulness increased with the robot, but the play was primarily functional play where children moved objects around with the robot.
The hope of robot intervention is to provide opportunities for children with disabilities to play at varying developmental levels, including functional play, but also extending to pretend play. In addition, we need ways to track the progress of the play level of children with disabilities. It is difficult to use standardized tests with children with disabilities, but previous studies have shown that robot task performance can be a proxy measure of cognitive skills. For instance, children with disabilities with a cognitive age of three performed robot control skills (cause and effect, inhibition, laterality, sequencing) at the same level as a typically developing children with the chronological age of three (Cook A. , Adams, Alvarez, Rios, & Encarnacão, 2012). The study presented here investigated play skills.
PURPOSE
T
- Develop scenarios with and without a robot where children can demonstrate play at different developmental levels (functional, pretend).
- Perform pilot studies to test the tasks with typically developing children in order to:
- Establish if the scenarios elicit play at the different levels.
- Analyze the effects that the robot has on children’s ability to participate in play.
Trials were performed with typically developing children to validate the developmental sequence of the play scenario and begin to inform a data base for proxy measure of play skills performance of children with disabilities.
METHOD
Participants:
| Participant | Age years | Gender | Participant | Age years | Gender |
|---|---|---|---|---|---|
| 1 | 3 | F | 6 | 5 | F |
| 2 | 3 | M | 7 | 5 | M |
| 3 | 4 | M | 8 | 6 | F |
| 4 | 4 | M | 9 | 7 | F |
| 5 | 5 | M | 10 | 8 | M |
| M=Male F=Female | |||||
Ten typically developing children between the ages of 3 and 8 participated in the pilot studies (table 1). They were English speakers and had no known physical, visual or hearing impairments.
Materials:
Lego robot:
The type of robot used in the play activity was the Lego® Mindstorm®. The program to control the robot was written in JAVA®. The direction of the robot was controlled by the child using four Ablenet Jelly Bean® switches connected to a computer (via Don Johnston Switch Interface®) which made the robot go forward, backward, turn right or turn left.
Types of toys:
The toys were selected according to the Child-Initiated Pretend Play Assessment (Chippa) developed by Stagnitti and Unsworth (2004). Two sets of gender neutral toys were used: conventional toys and unstructured materials. The conventional toys were commercially available toys and included: animals (lion, elephant, bear, zebra), fake food (a bottle of pop, bananas and corn), a boy doll and a girl doll, a fence made of Lego pieces and a truck. The unstructured materials, junk play materials or inanimate objects, were: 1 shoe box, 1 tin, 1 dowel stick, 3 flat stick, 3 pebbles, 1 plastic cone, and Lego fences. The use of both conventional toys and unstructured play materials allowed functional and pretend play to be performed (e.g. using a block as a hockey player is pretend play).
Set-up:
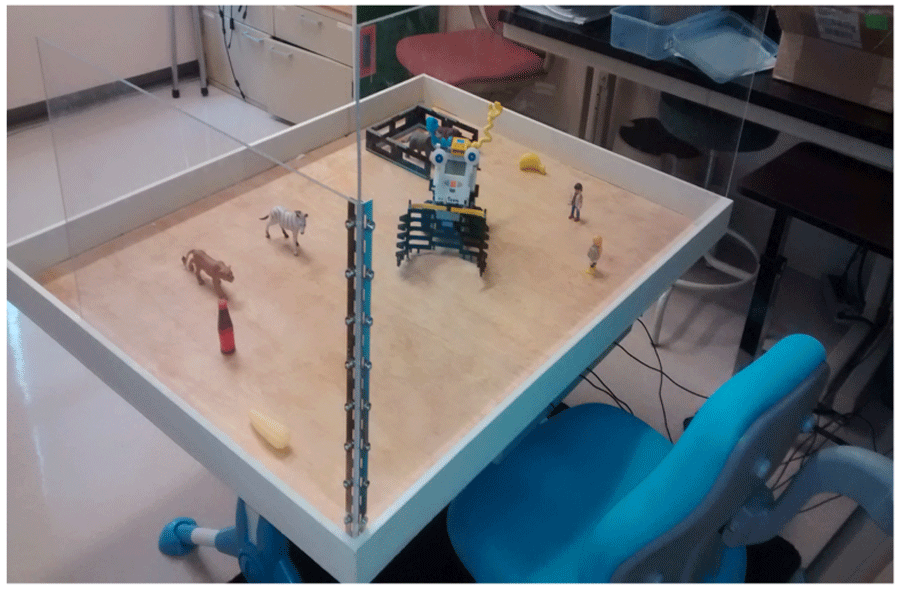
All sessions were recorded with a view of the play area. All of the conventional toys and unstructured materials were placed in the same spot in the workspace at the beginning of each session (Figure 1). For the robot condition a wall of Plexiglas restricted children from manipulating the toys using their hands.
Procedure:
There were four conditions: robot present (yes, no) and type of toys (conventional toys and unstructured materials). The order was randomly chosen before the session. Children 5 years old and over played for 5 minutes for each condition, while younger children played for 3 minutes. If the child did not naturally exhibit pretend play in the robot condition, the researcher modeled play schemes (such as “the robot is drinking water” or “the robot is feeding the animals”) and then the child played for 5 (or 3) more minutes.
During the session, the researcher was always available, and commented on what the child was doing and asked questions such as: What is it happening?
Data Collection:
A coding system according to Barton’s taxonomy of pretend play (2010) was developed and implemented to code the different levels of play. The coding system consists of 3 broad categories: no play, functional play and pretend play, and definitions and sub-types are shown in table 2.
The videos were coded in 15 second intervals. Occurrences of play in that interval were coded. If the same play activity continued into the next interval, it was not counted as a new occurrence. If the child or toys were out of the camera view, that interval was scored as “missing”. The count of the occurrences of each type of play was divided by the total of all play occurrences (no play, functional play and pretend play). In other words, this showed the percentage of each type of play observed during each condition.
Two raters scored all videos. They independently scored 100% of the sessions. It was identified that it was difficult to achieve agreement when all the sub-types of play where included in the coding system but when the three categories of play were analyzed, the inter-reliability was an average of 87%. Therefore, the results presented here are only scores attained in the three defined categories (no play, functional and pretend play).
RESULTS
DISCUSSION
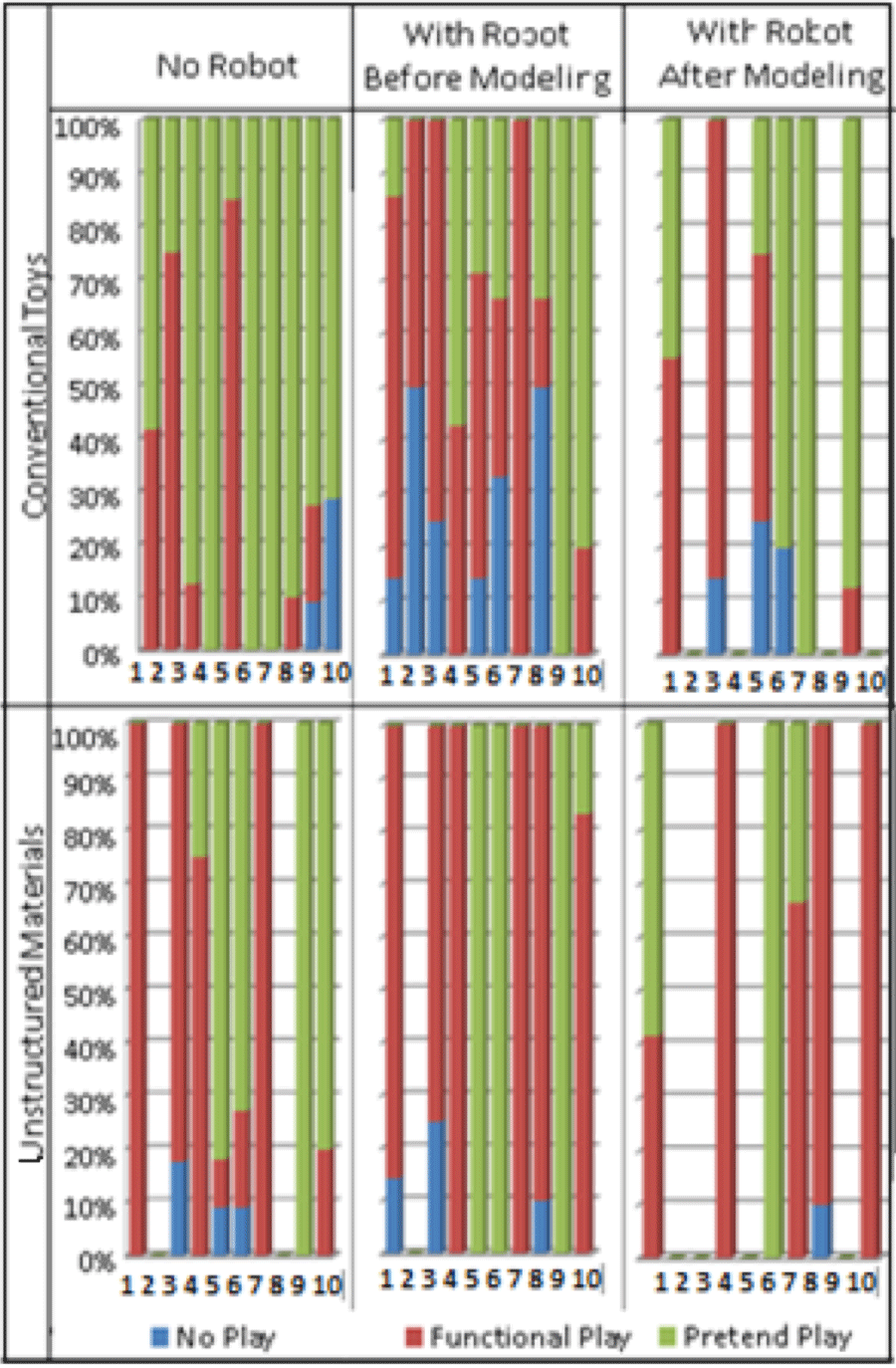
The scenarios elicited play at the expected developmental levels for the no robot condition, but not for the robot condition. Figure 2 shows that without the robot, for conventional toys and unstructured materials, children tended to do more functional play when young and more pretend play as they increased in age. This follows the developmental sequence expected for each age group (Piaget, 1951). One of the 5 year old participants demonstrated a high level of functional play; this is not consistent with what is expected for his age group. When the robot was included in the play, the results varied and did not necessarily follow the developmental sequence that was expected.
Children presented a higher percentage of pretend play without the robot than with the robot for both conventional toys and unstructured materials. Hence, the robot does affect type of play performed by children. This could be because typically developing children are more accustomed to manipulating toys directly (no robot condition) and the robot poses a higher level of cognitive difficulty therefore interfering with the play activity (robot condition). The higher percentage of no play when the robot was introduced may also indicate that children require time to think about how they are going to use the robot.
When the researcher performed modeling of pretend play with the robot the percentage of pretend play increased. This indicates that the robot can be used for pretend play schemes but children will require the opportunity to learn and adapt to use the robot in a playful way.
CONCLUSION
The play conditions presented to the children allowed the researchers to score the different levels of play (pretend and functional play) using a play coding system. In general it was observed that children followed the expected developmental sequence for play without the robot (e.g. more functional play when younger and more pretend play when older), but when the robot was included in the play children tended to perform more functional play regardless of their age. This appears to be because initially they do not know how to include the robot in pretend play schemes. Some degree of modelling will be required so that children can learn ways to include the robot in pretend play schemes.
This study revealed that using the Lego® Mindstorm® robot could be useful to promote pretend play in children with physical disabilities since it allows them to manipulate toys using accessible switches. Future studies must be performed with more typically developing children to test the validity of these findings. Subsequently, studies will be done with children with disabilities. Since they are not accustomed to manipulating toys directly, the results may differ.
REFERENCES
Barton, E. (2010). Development of a taxonomy of pretend play for children with disabilities. Infants & young children, 247-261.
Cook, A., Adams, K., & Encarnacão, P. (2010). Robots: Assistive technologies for play, learning and cognitive developement. Technology and Disability 22.
Cook, A., Adams, K., Alvarez, L., Rios, A., & Encarnacão, P. (2012). Cross-cultural use of physical and virtual robots to reveal cognitive understanding in young children. Baltimore: Resna 2012.
Ferland, F. (2005). The Ludic Model . Ottawa: CAOT Publications.
Martin, S. (2014). Play in Children with Motor Disabilities. Theses and Dissertations--Rehabilitation Sciences. Paper 21.
Pfeifer, L., Pacciulio, A., Dos Santos, C., & Dos santos, J. S. (2011). Pretend play of children with cerebral palsy. Physical & Occupational Therapy in Pediatrics, 31(4), 390-402.
Piaget, J. (1951). Play, Dreams and Imitation. New York: Norton.
Reilly, M. (1974). Play as exploratory learning: studies of curiosity behavior. Beverly Hills: Sage.
Rios, A. (2014). Playfulness in Children with Severe Cerebral Palsy when Using a Robot. PhD Dissertation. Edmonton: University of Alberta.
Stagnitti, K., & Unsworth, C. (2004). The Test-Retest Reliability of the Child-Initiated Pretend Play Assessment. The American Journal of Occupational Therapy, 93-99.
ACKNOWLEDGEMENT
The authors would like to thank the following people for contributions to the study: Al Cook and Liliana Alvarez for their contributions to the protocol, Elizabeth Guevara at CIC-IPN Mexico, for programing the software used for the Lego Mindstorm robot; Pedro Encarnação at the Catholic University of Portugal, for his early work on robot tasks; and Isabella Sa with Federal Institute of Science, Education and Technology of Rio de Janeiro for help with the sessions.