Philibert F. Kongtcheu, PFK Technologies Cambridge MA
Erin Anastasi, United Nations Populations Fund (UNFPA) New York, NY
ABSTRACT
The effort to power human limbs with external sources of power is a centuries’ old inventor’s elusive dream (US Patent No. 440684, 1890) (US Patent No. 1308675, 1919). Thanks to new scientific developments, leading research efforts in the past decade have proposed relatively functional powered exoskeletons/exosuits to assist mobility impaired individuals during ambulation (Frumento, Messier, & Montero, 2010). Nonetheless, a major remaining stumbling block is the difficulty to enable dependable, user-friendly wearable devices. This paper introduces a new class of rehabilitative medical devices whose purpose is to support or enhance the mobility of a weakened body part which we call MotionRehab. MotionRehab are conceived as exosuits that break new ground and shift the paradigm in this burgeoning field by primarily leveraging the body’s own energy rather than an external power supply source. This approach, more environmentally friendly, empowering, further stimulates the body’s natural ability to build new strength in the weakened areas
A powered exoskeleton, also known as powered armor, exoframe, or exosuit, is a mobile machine consisting primarily of an outer framework (akin to an insect's exoskeleton) worn by a person, and powered by a system of motors, hydraulics, pneumatics or levers that delivers at least part of the energy for limb movement. The term “exoskeleton” and “exosuits” may be used interchangeably. Here we use more the term “exosuit to emphasize that the external frame might be made of soft wearable componentsBACKGROUND

Traditional and widespread methods and devices for alleviating the impairments of the physically impaired population include walking aids such as walkers, crutches, braces, wheelchairs, and other orthotic or orthopedic devices, often in combination with surgical procedures and physical therapy and/or occupational therapy rehabilitation.
In the past decade, research in powered exoskeleton technologies have brought closer to reality the possibility of using these as better enabling alternatives or complementary solutions. However, one of the most vexing problems still facing designers of powered exoskeletons is the difficulty in finding light and dense enough external power sources that can be worn and sustain a full-body powered exoskeleton for more than a few hours. Furthermore cost of such exosuits, when equipped with any meaningful power supply, often have prices in the six figure range, putting them out of reach of the largest number of those who might need them.


Figure 2: (b)
Strong limb moving forward, helping pull forward weaker limb at the knee and ankle
PURPOSE

METHOD
We accomplish our purpose by studying in detail two examples chosen because they represent a substantial population, in particular individual with polio-like paralytic sequelae. We also chose those examples because they are canonical. This means the solution need to address other cases can be in many instances reduced to a combination of the strategies developed and presented in these two examples. We focus on the situation of a person with asymmetric lower limb strength, where one limb is weaker or partially paralyzed, and the other limb is stronger. In the first example, we study how to self-generate power to aid the person walk more evenly and more efficiently. In the second example, we analyze how to optimally enable the same person to run.
Example 1: One Strong Leg and One weak leg in normal ambulation
In this example, as shown in Fig 1, the person has one stronger, more muscular leg and one thinner, atrophied leg, as is the typical case of a paralytic polio survivor . Our goal is to harness the power of the stronger leg to assist the weaker leg during normal ambulation. Here the left leg is obviously the stronger one and the right leg is the weaker one.
As the person starts to walk, we can readily see (Figs 2(a) &2(b).) that as the left leg steps forward, if a spring in the exosuit is attached to its back, resisting its motion by pulling against its extension forward, this will create tension in the spring whose force, if swiftly shifted to pull forward the lagging right leg, will augment the force needed to propel it forward, supplementing the propelling power of the right, weaker quadriceps. Here we can have the spring also helping to lift the right leg at the ankle level Fig 2(b) or lifting the tip of the right foot forward in case of a dropped foot condition.

Next, as the left leg extends further forward, the cycle begins again. This thus provides a mechanism through which the left leg transfers muscular power to support a weaker right leg.
Example 2: One Strong Leg and One weak leg while running
The solution of the previous example can be reasonably anticipated to work perfectly well when the individual is walking at a regular pace where perhaps maximum speed is not of the essence. In the case where the individual is running and wishes to move as fast as possible as shown in Fig 4, restraining the stronger leg to harness its power means that the stronger leg cannot advance as fast as it otherwise could. This is especially the case, as shown in the picture, where the weaker –right – leg tends to drag.
The question then would become, how could one use the body’s other sources of strength to empower the weaker leg to move as fast as the stronger leg at its unencumbered fastest?
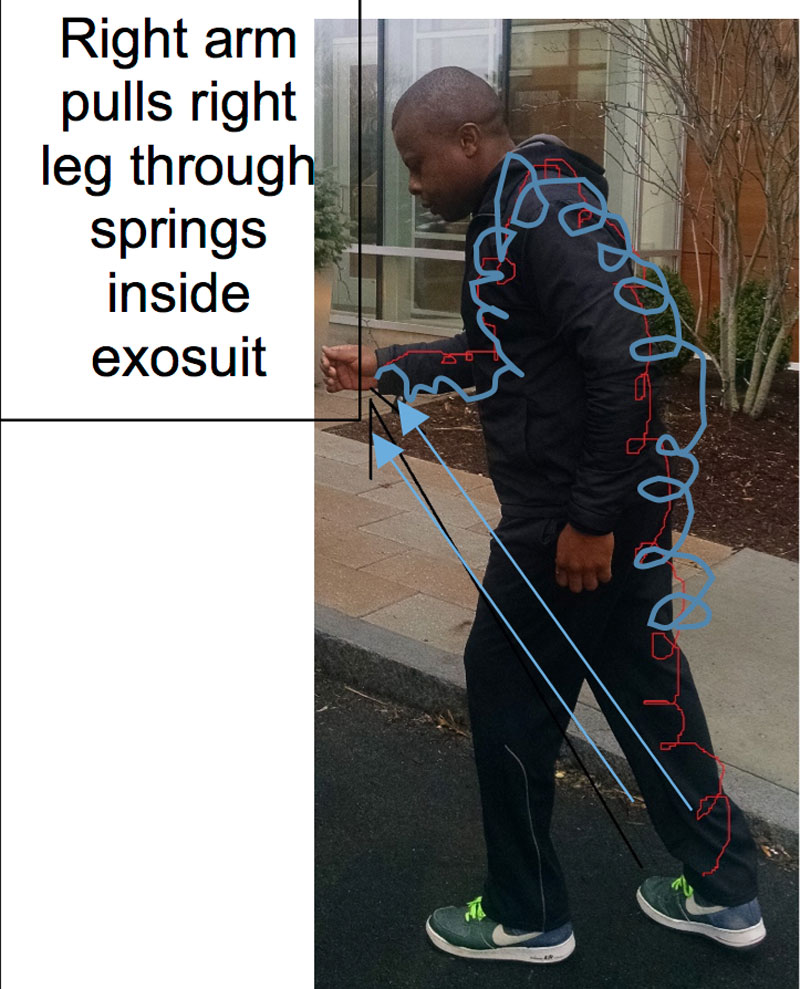
One solution in this case would be a MotionRehab exosuit that extends from the lower limbs to the upper body and limbs. As can be since in Fig.3, as the individual picks up the pace, the arms rotate in sync with the motion of the leg. Therefore, a sustainable solution would seamlessly harness the power of the motion of the arms as they rotate rhythmically with the lower limb.
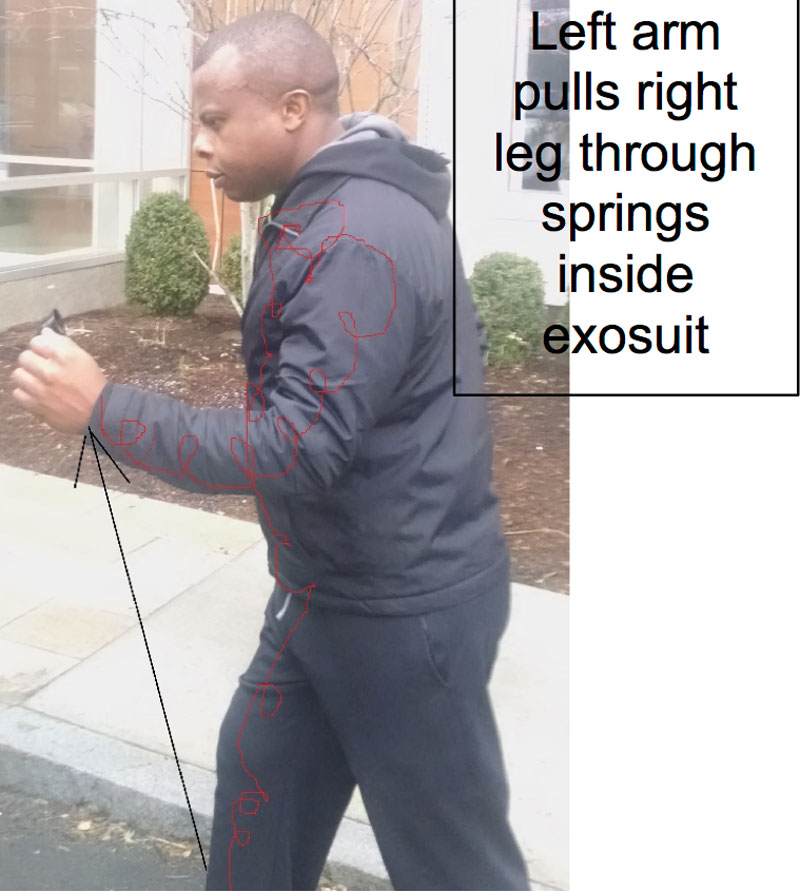
Likewise, if springs are attached to the left arm rotating in phase with right leg, they may further boost its motion forward.
This solution can therefore harness motion from both arms to assist the one weaker limb, helping it to match the strength of the stronger lower limb. The motion rehab exosuit in this case would be worn more like an underclothes diving suit with specialized fibers in the precomputed densities to achieve the desired springing effects at the right places.
DISCUSSION
The scenarios contemplated in the examples above are generic and their application different situations or more complex impairments leverage similar principles. For instance, if a person with weak legs is attempting to stand up or climb stairs, the strength of their arms can be put to use to assist as shown in the second example. If the physical impairment is of a more complex nature, it is relatively straightforward to see how one can combine the methods of example one and two in an exosuit strength from stronger areas to weaker areas.
CONCLUSION
In this study, we have use two examples to illustrate the mechanical principles according to which a mostly self-powered exoskeleton or exosuit can be practically designed to suit more general cases of impairment, We have termed such built devices MotionRehab because, in addition to facilitating motion, they have a rehabilitative role in that they stimulate the weaker parts of the body to continue to be fully used, thereby strengthening them over time. It is an environmentally more friendly solution, more sustainable, which should reduce the overall cost of the device and facilitate widespread adoption.
Footnotes
A powered exoskeleton, also known as powered armor, exoframe, or exosuit, is a mobile machine consisting primarily of an outer framework (akin to an insect's exoskeleton) worn by a person, and powered by a system of motors, hydraulics, pneumatics or levers that delivers at least part of the energy for limb movement. The term
“exoskeleton” and “exosuits” may be used interchangeably. Here we use more the term “exosuit to emphasize that the external frame might be made of soft wearable components
As is the case for the first named author, whose pictures are used to illustrate the concepts.REFERENCES
Defina, S., & Celani, E. (2015). Biomechatronic Exoskeleton. Lowell, MA: University of Massachusetts at Lowell.
Frumento, C., Messier, E., & Montero, V. (2010). History and Future of Rehabilitation Robotics. Worcester, MA: WORCESTER POLYTECHNIC INSTITUTE.
Kelley, C. L. (1919). US Patent No. 1308675.
Yagin, N. (1890). US Patent No. 440684.