The effect of hand contact speed on wheelchair propulsion kinetic
Abstract
The purpose of this study was to investigate the effect of hand-speed prior to contact with the pushrim on wheelchair propulsion kinetics. Twenty-eight manual wheelchair users (MWUs) with paraplegia enrolled in this study. Velocity of the hand and the wheel were calculated using a motion analysis camera system and Smartwheel. The results showed that when subjects propelled with a slower hand speed in comparison with wheel speed, they exerted larger tangential and radial forces (r = 0.41, p = 0.03; r = 0.40, p = 0.035), and had a higher rate of tangential and radial loading (r = 0.44, p = 0.02; r = 0.46, p = 0.014). These findings may provide insight into the relationship between propulsion technique and upper extremity pain and injury.
Background
Previous studies indicate that the prevalence of carpal tunnel system (CTS) among MWUs is approximately 49% [1]. A higher rate of loading on the pushrim during propulsion may lead to the development of CTS [2]. In order to reduce the rate of loading during the impact phase of propulsion, a compliant pushrim was introduced and investigated [3,4]. A recent study showed that during wheelchair propulsion, the major source causing a higher rate of impact loading on the pushrim may relate to how fast the hand moves prior to contact with the pushrim [5]. The purpose of this study was to investigate the relationship between hand speed immediately before impact with the pushrim and wheelchair propulsion kinetics (maximum rate of loading, maximum propulsion force, and mechanical propulsion efficiency). We hypothesize that a larger difference between the hand speed prior to contact and wheel speed will necessitate greater propulsion force and a higher rate of loading. The findings may provide valuable insight into the relationship between propulsion technique and upper extremity pain and injury among MWUs
Method
Subjects:
Twenty-eight MWUs ( 21 men and 7 women ) with thoracic or lumbar spinal cord injuries ranging from T4 to L2 provided informed consent prior to participation in the study. Their mean age and years post injury were 41.7 +10.2, and 12.6 +6.9 years respectively. Their average weight was 79.5 +12.6 kilograms
Experiment protocol:
Subjects’ own personal wheelchairs were used in the experiment. The wheelchairs were fitted bilaterally with Smartwheels [2], force and torque sensing pushrims, and secured to a dynamometer with a four point tie down system. IRED (infrared emitting diode) markers were placed on the subject’s 3th metacarpalphalangeal joints to record the hand position in a global reference frame via a three-dimensional camera system (OPTOTRAK, Northern Digital Inc.) Attachment of the Smartwheels did not change the camber or diameter of the subject’s normal pushrim or tire size [6]. Subjects were instructed to propel at a steady-state speed of 0.9m/s. Propulsion speed was displayed on a 17-inch computer screen placed in front of the subjects. Upon reaching the target speed for one minute, data collection was initiated and continued for 20 seconds. Smartwheel data were collected at 240 Hz and filtered with an 8th order Butterworth low-pass filter, zero lag and 20 Hz cut-off frequency. Afterwards, the kinetic data were linearly interpolated for synchonization with the kinematic data collection rate of 60 Hz.
Data analysis:
The hand speed, Vhand, prior to contact with the pushrim was determined by differentiating the x, y, z hand positions in the globe reference system.
Vhx=dx/dt Vhy=dy/dt Vhz=dz/dt
![]()
The wheel speed, Vwheel, was obtained directly
from the Smartwheel. The relative speed, Vr
, was defined as the difference between the hand speed prior
to contact and wheel speed, Vr=Vwheel
- Vhand. Since previous data have shown that weight
of the user is correlated with propulsion forces, the kinetic
data were normalized by the subject’s weight in Newtons
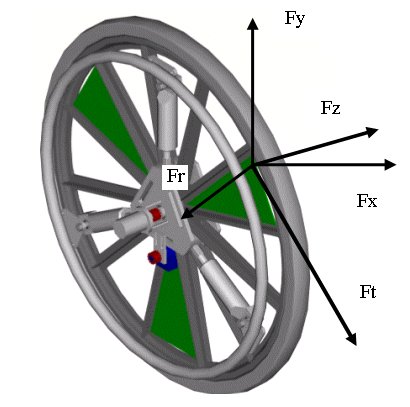
[2]. The Smartwheel provided forces and moments
in three global reference planes shown in Figure 1. A coordinate
transformation was performed to convert the resulting forces
from a global reference frame to a local one with respect
to the pushrim where the forces are denoted as radial (Fr),
tangential (Ft), and lateral (Fz) forces. Total force was
defined as
![]() .
.
Five consecutive strokes were used in the data analysis. Peak
forces, the maximum rate of loading (slope of the force curves),
and the mechanical effective force (MEF) were calculated for
each stroke, where the MEF was calculated as the percentage
of the resultant force leading to forward propulsion, i.e
MEF=Ft2/Ftotal2. For each parameter,
data from all five strokes on the right side were averaged
together to provide a single kinetic value for the trial
Statistical Analysis:
The Pearson correlation test statistic was used to determine the relationship between relative speed, Vr, and propulsion kinetic parameters (a=0.05). All statistical analyses were completed using SPSS software (SPSS, Inc.)
Results
> The results indicated a positive relationship between relative speed and rate of rise of tangential radial, and total forces (Table 1). The peak tangential, radial and total forces also positively correlated with relative speed. No significant correlation between the relative speed and mechanical propulsion efficiency was found.
| Kinetic variable (n=28) | Relative speed |
| Peak tangential force | r = 0.410 p = 0.030* |
| Peak radial force | r = 0.399 p = 0.035* |
| Peak total force | r = 0.400 p = 0.035* |
| The rate of rise tangential force | r = 0.438 p = 0.02 * |
| The rate of rise radial force | r = 0.461 p = 0.014* |
| The rate of rise total force | r = 0.375 p = 0.049* |
| Mechanical propulsion efficiency | r = 0.011 p = 0.955 |
| * denotes a significant difference (p<0.05) | |
Our results showed that hand speed prior to contact is slower than the wheel speed for a majority of subjects (relative differences ranging from 0.07 m/sec to 0.59 m/sec). The mean of relative speeds was 0.31 + 0.12 m/sec. The larger the difference between these two speeds, the higher the rate of loading, and the greater the peak weight-normalized force imparted to the pushrim (Figure2). As larger weight-normalized forces and faster rates of loading are associated with CTS [2], subjects with a greater mismatch in timing the coupling of the hand with the pushrim may be at a higher risk for developing CTS. One possible explanation for this mismatch in timing is that some wheelchair users have not developed the skill, or are limited in their ability to synchronize their arm movements with the spinning wheel. The higher rate of tangential and radial loading suggests that individuals with greater relative velocities are not matching the rhythm of spinning wheel and are likely ‘punching’ the pushrims instead of applying smooth even loads. Another possible explanation may relate to wheelchair configuration. A more forward rear wheel axle results in a reduction in rate of rise of total force [7]. Therefore, the rear axle position may influence the hand speed prior to contact, and affect the propulsion kinetics as well.
 |
> Our findings indicate that MWUs may be less prone to developing CTS if their hand speed prior to contact is more closely matched to wheel speed. Future studies are needed to determine if training and optimizing wheelchair configuration can improve the timing of the coupling between the hand and pushrim.
Reference:
- Gellman H. Chandler DR. Petrasek J. Sie I. Adkins R. Waters RL. (1988). Carpal tunnel syndrome in paraplegic patients. Journal of Bone & Joint Surgery Am, 70, 517-519
- Boninger ML, Cooper RA, Baldwin MA, Shimada SD, Koontz AM (1999). Wheelchair pushrim kinetics: body weight, and median nerve function. Archives of Physical Medicine and Rehabilitation, 75, 513-51
- Richter WM, Baldwin MA, Chesney DA, Axelson PW, Boninger ML, Cooper RA (2000). Effect of pushrim compliance on propulsion kinetics. Proceedings of the RESNA 2000 Annual Conference. Arlington, VA: RESNA Press (396-398
- Richter WM, O’Connor TJ, Chesney DA, Axelson PW, Boninger ML, Cooper RA (2000). Effect of pushrim compliance on propulsion effeciency. Proceedings of the RESNA 2000 Annual Conference. Arlington, VA: RESNA Press (381-383
- Richter WM, Axelson PW, Cooper RA (2002). Kinematic state of the hand at impact with wheelchair handrim as a function of handrim compliance. Proceedings of the RESNA 2002 Annual Conference. Minneapolis, MN: RESNA Press (377-379
- Asato KT, Cooper RA, Robertson RN, Ster JF (1993). Smartwheels: development and testing of a system for measuring manual wheelchair propulsion dynamics. IEEE Trans Biomed Eng, 40,1320-1324
- Boninger ML, Baldwin M, Cooper RA, Koontz A, Chan L (2000). Manual wheelchair pushrim biomechanics and axle position. Archives of Physical Medicine and Rehabilitation, 81, 608-613
Acknowledgements
This study was supported by U.S. Department of VA Affairs (project B689-RA and B2674-CA), Eastern Paralyzed Veterans of America, National Institutes of Health (NIH K08 HD 01122-01), and National Institute on Disability and Rehabilitation Research (NIDRR H133A011107)
Yu-Sheng Yang
Human Engineering Research Labs
VA Pittsburgh Healthcare System
Pittsburgh, PA 1521
Phone: (412) 365-4850
Fax: (412) 365-4858
Email:yuy7@pitt.edu