An analysis of trunk excursion in manual wheelchair users
ABSTRACT:
The purpose of this study was to examine trunk excursion during manual wheelchair propulsion and the extent to which direction of movement is related to user characteristics and delivery of force to the wheels. Eighteen manual wheelchair users (MWUs) with paraplegia pushed their wheelchairs at a slow and moderately fast speed while the motion of their trunk was recorded as well as the forces applied to the wheels during propulsion. During steady state propulsion the majority of MWU showed greater forward trunk motion during push phase and greater backwards trunk motion during recovery phase. Surprisingly, further analysis showed the trunk was moving backwards at the beginning of the push phase for a majority of MWU. This finding was not found to adversely affect force application.
KEYWORDS:
Trunk motion, wheelchair propulsion, biomechanics
BACKGROUND:
The way in which a MWU translates force from the trunk through the upper extremities to the hand rim, may impact propulsion biomechanics and ultimately the extent to which upper extremity pain and injury develops (1). Previous studies have varied however, in defining the trunks role in wheelchair propulsion. Rodgers et al. found that flexed style of propulsion may be compensatory for upper extremity muscle weakness, while Chow et al. found trunk flexion to be a critical component of uphill climbing over 6 degrees of slope (2,3). Other studies have measured trunk excursions during manual wheelchair propulsion and generally found a forward shift of the trunk with increasing activity (4,5). Vanlandewijck et al observed 40 wheelchair athletes and noticed an increase in delay of movement from trunk flexion back into extension towards the end of the push phase proportional to change in velocity, when velocity was increased from 1.11 to 2.22 m/sec(6). These studies emphasized how much the trunk flexes forward during propulsion, independent of directional changes that might occur when the arms are in contact with the rim. Based on our experiences in research on propulsion biomechanics, it would seem that to maximize propulsion efficiency, the trunk and arms should move uniformly in the same direction when exerting forces on the pushrim.
Research Questions
Do wheelchair users exhibit uniform movement of the trunk and arms or is there evidence that trunk movement occurs in the opposite direction of arm movement (referred to as paradoxical movement). If so, how does paradoxical movement of the trunk and arms relate to user characteristics (e.g., level of injury, gender, age and time using a wheelchair) and the ability to deliver propulsion force? We hypothesized that a propulsive style in which the trunk moves backwards while the arms push forward would lend to poorer propulsion biomechanics and would be a style characteristic of a higher level of spinal cord injury or a style of that of an individual having less wheelchair propulsion experience. It is our contention that the study findings could lend valuable insight into possible mechanisms of upper extremity injury. In addition it is possible that based on our findings we could gain knowledge in making recommendations related to wheelchair fit and design, specific to postural support.
METHOD:
Subjects:
Eighteen MWUs (12 men and 6 women) with thoracic or lumbar spinal cord injuries ranging from T4 to L4 provided informed consent prior to participation in the study . Their mean age and years post injury were 37.1 + 8.1, and 14.6 + 6.6 years respectively . Their average weight was 72.2 + 17.2 kilograms.
Experiment protocol:
Subjects' own personal wheelchairs were fitted on the right side with a Smart wheel (7) , force and torque sensing pushrim, which measured Fx, Fy, Fz, Mx, My and Mz for a six degree of freedom wheel in the global reference system. Wheelchairs were s ecured to a wheelchair dynamometer with two independent rollers. An infrared emitting diode marker of a three-dimensional camera system (OPTOTRAK, Northern Digital Inc.) was placed on a rigid body secured to the subjects' torso to measure trunk excursion. Subjects were instructed to propel at two steady-state speeds 0.9 m/s (2mph), and 1.8 m/s (4mph) respectively. Propulsion speed was displayed on a 17-inch computer screen placed in front of the subjects . Upon reaching the target speed for one minute, data collection was initiated and continued for 20 seconds. Smart wheel data were collected at 240 Hz and filtered with an 8 th order Butterworth low-pass filter, zero lag and 20 Hz cut-off frequency. Afterwards, the kinetic data were linearly interpolated for synchronization with the kinematic data collection rate of 60 Hz.
Data analysis:
We concentrated on analyzing trunk excursion in the anterior and posterior direction as the trunk has been shown to exhibit little motion in the medial/lateral or inferior/superior directions during wheelchair propulsion (8). During the push phase or hand contact portion of propulsion, the trunk movement was quantified in terms of the percent of time (%) and distance of travel (mm) the trunk moved forward (flexion) or backward (extension) at 0.9 m/s and 1.8m/s respectively. The same percent and distance (mm) of forward and backward trunk movement was quantified during the recovery phase of the stroke (when the hands were not in contact with the push rim). The kinetic parameters included: peak tangential force, peak resultant force, peak resultant force rate of rise (slope of the resultant force curve), and mechanical efficiency (ratio of tangential force squared to the resultant force squared). In addition we also determined stroke cadence or number of strokes per second. For each subject, kinetic variables, trunk movement variables and cadence were determined for the first ten strokes and then averaged. All analyses were performed in MATLAB (Mathworks, Inc. Natwick, MA).
Statistical Analysis:
A Pearson correlation test was used to examine the association between all force and trunk movement variables as well as the association between user characteristics (age, time since injury and spinal cord injury (SCI) level) and trunk movement. An independent t-test was used to examine gender differences between the trunk movement variables. A paired t-test was used to compare the trunk movement variables between the two speed conditions. All statistical analyses were completed using SPSS software with an a value set at 0.05.
RESULTS:
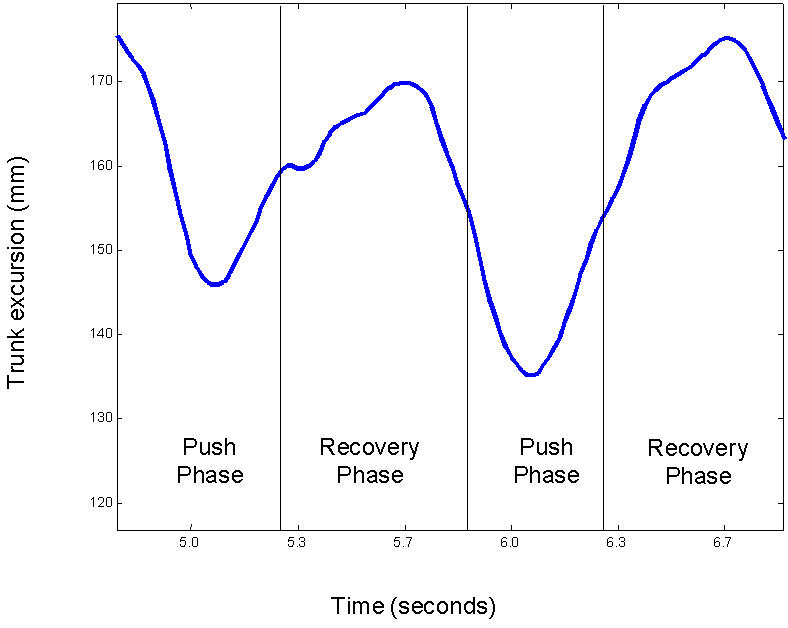
The results indicated that a majority of wheelchair users do exhibit paradoxical movement of the trunk and arms (Table 1). Close observation of the trunk excursion plots revealed that the trunk is moving backward at the beginning of the stroke and then switches direction 42% or 52% of the way (on average) into the push phase at 0.9 m/s and 1.8 m/s, respectively. A representative plot of trunk excursion at 0.9 m/s is shown in Figure 1. In the push phase, forward motion of the trunk was always greater than backward motion but this difference was less pronounced from 0.9 m/s to 1.8m/s Conversely, in the recovery phase forward motion was always less than backward motion with less of a contrast in motion at the 1.8 m/s speed compared to the 0.9 m/s speed. There was no association between SCI level, propulsion experience, age and gender and paradoxical trunk movement patterns during propulsion. In addition, none of the kinetic force parameters measured by the Smart wheel s or stroke cadence were related to individual variations in forward and backward trunk motion.
|
Push Phase |
Recovery Phase |
||||||
|---|---|---|---|---|---|---|---|---|
|
% Time means |
ROM (mm) means |
% Time means |
ROM (mm) means |
||||
|
Forward |
Backward |
Forward |
Backward * |
Forward |
Backward |
Forward** |
Backward |
2mph |
57 + 18 |
42 ± 18 |
16.48 ± 13.67 |
9.99 ± 5.78 |
40 ± 20 |
59 ± 20 |
9.51 ± 6.22 |
15.75 ± 11.75 |
4mph |
47 ± 22 |
52 ± 22 |
15.88 ± 12.69 |
15.40 ± 10.35 |
45 ± 19 |
54 ± 19 |
15.99 ± 9.20 |
16.10 ± 10.51 |
| * p= .013 significant difference between speeds ** p= .003 significant difference between speeds |
||||||||
 |
|---|
DISCUSSION:
Counterintuitive to our original theory, this study found that wheelchair users exhibit rearward trunk movement when the arms are moving forward delivering propulsive forces at the beginning of the push phase. While there was no association found with level of SCI, it is interesting to note that subjects in this study who had a low, lumbar level SCI did not exhibit backward trunk movement at the beginning of the push phase. It is evident that a MWU with more trunk control can use abdominal function to minimize the degree to which reactive forces from pushing forward sends the trunk backwards. As propulsion forces increase with increasing speeds or resistances we would expect to find that trunk moves further backwards. Our findings support this theory as the backwards movement during the push phase increased from 10 mm at 0.9 m/s to 15.4 mm at 1.8 m/s (p=.013).
There was no association between paradoxical movement patterns and the forces applied to the pushrim. One theory is that while forces are equal, individuals whose trunks move backwards require more arm strength. Yet it remains unclear to what extent having abdominal function or adequate postural support of the torso might have on improving force application and or stroke cadence. It is possible that use of a rigid back support in combination with propulsion training, could help minimize any inefficiencies produced by paradoxical trunk movement. Current studies are underway to look at other assistive applications such as the effect of functional electrical stimulation of the trunk and abdominal muscles on force production.
REFERENCE:
- Aljure J, Eltorai I, Bradley WE, Lin JE, & Johnson B. Carpal tunnel syndrome in paraplegic patients. Paraplegia 1985 ; 23; 182-186
- Chow, J.W., Millikan, T.A., Carlton, L.G., Chae, W.S., & Morse, M.I. Kinematic characteristics of wheelchair propulsion over ramps of different slopes for young males. Proceedings of the 23rd Annual Meeting of the American Society of Biomechanics . 1999; 188-189
- Rodgers M, Gayle W, Figoni SF, Kobayashi M, Lieh J, Glaser RM. Biomechanics of wheelchair propulsion during fatigue. Arch Phys Med Rehabil 1994;75:85-93
- Veeger HEJ, Van der Woude LHV, Rozendal RH. Wheelchair propulsion technique at different speeds. Scan J Rehabil Med 1989; 21: 197-203
- Van der Woude LHV, Veeger HEJ, Rozendal RH. Propulsion technique in hand rim wheelchair propulsion. J Med Eng Tech 1989; 13: 136-41
- Vanlandewijck YC, Spaepen AJ, Lysens RJ. Wheelchair propulsion efficiency: movement pattern adaptations to speed changes. Med Sci Sports Exerc 1994; 26 (11): 1373-81
- Asato KT, Cooper RA, Robertson RN, Ster JF. SMARTwheels: development and testing of a system for measuring manual wheelchair propulsion dynamics. IEEE Trans Biomed Eng, 1993; 40,1320-1324.
- Boninger ML, Cooper RA, Shimada SD, Rudy TE. Shoulder and elbow motion during two speeds of wheelchair propulsion: a description using a local coordinate system. Spinal Cord 1998; 36(6):418-426
ACKNOWLEDGEMENTS:
This study was supported by U.S. Department of VA Affairs (project B689-RA and B2674-CA), Eastern Paralyzed Veterans of America, National Institutes of Health (NIH K08 HD 01122-01), and National Institute on Disability and Rehabilitation Research (NIDRR H133A011107) .
Ian Rice,
Human Engineering Research Labs,
VA Pittsburgh Healthcare System,
Pittsburgh, PA 15216
Phone: (412) 365-4850,
Fax: (412) 365-4858,
Email: imr1@pitt.edu