Influence of Gripping Moments on Mechanical Efficiency of Wheelchair Propulsion
ABSTRACT:
This study quantified gripping moments during propulsion and determined how they influence mechanical efficiency. Twenty-two manual wheelchair users (MWUs) with paraplegia pushed their wheelchairs at two constant speeds while kinetic and kinematic data were collected. Gripping moments were estimated to be 14% and 11% of the propulsion moments measured at the hub during slow and fast speeds, respectively. Under the slow speed condition, these gripping moments helped MWUs deliver greater effective forces on the pushrim thus improving their mechanical efficiency. Conversely, gripping moments could play a role in the high prevalence of carpal tunnel syndrome reported among MWUs.
KEYWORDS:
Biomechanics, kinetics, kinematics, wheelchair propulsion
BACKGROUND:
During wheelchair propulsion, the hand is capable of grasping the pushrim and creating a moment about the hub. These moments will be referred to as gripping moments' from this point forward. Previous studies have shown conflicting results about the magnitudes of gripping moments and their role in generating effective forces during wheelchair propulsion [1,2]. Vansickle et al. (2001) reported that gripping moments were less than 1 N*m in any direction and were thus negligible, whereas Veeger et al. (1991) reported that the hand moments were 5 N*m, which contributed approximately 31% of the moments measured at the hub.
Tangential pushrim forces, required for the calculation of mechanical efficiency, can be determined either one of two ways, using moment data measured at the hub or the applied forces acting at the center of pressure. The moment data measured at the hub includes the gripping moment component whereas the later method does not. If gripping moments were negligible, the forces computed from the two methods would be equal.
The purpose of this study was to quantify gripping moments during propulsion and determine if and how they influence determination of the tangential forces and mechanical efficiency. As gripping moments are indicative of wrist musculature activity, quantifying their role during wheelchair propulsion might help explain the high prevalence of carpal tunnel syndrome (CTS) among MWUs
METHOD:
Subjects:
Twenty-two MWUs (16 men and 6 women) with thoracic or lumbar spinal cord injuries ranging from T4 to L4 provided informed consent prior to participation in the study . Their mean age and years post injury were 42.0 + 16.4, and 15.2 + 8.9 years respectively . Their average weight was 78.9 + 18.1 kilograms.
Experiment protocol:
Subjects' personal wheelchairs were s ecured to a wheelchair dynamometer with two independent rollers. The wheelchairs were fitted bilaterally with SMART Wheel s [3] , force and torque sensing pushrims which measured Fx, Fy, Fz, Mx, My and Mz for a six degree of freedom wheel in a global reference system. Infrared emitting diode markers were placed on the subject's 3 rd metacarpalphalangeal (MCP) joint, radial and ulnar styloid processes to record the hand position in a global reference frame via a three-dimensional camera system (OPTOTRAK, Northern Digital Inc.). Subjects were instructed to propel at two steady-state speeds of 0.9m/s, and 1.8 m/s respectively. Propulsion speed was displayed on a 17-inch computer screen placed in front of the subjects . Upon reaching the target speed for one minute, data collection was initiated and continued for 20 seconds. SMART Wheel data were collected at 240 Hz and filtered with an 8 th order Butterworth low-pass filter, zero lag and 20 Hz cut-off frequency. Afterwards, the kinetic data were linearly interpolated for synchonization with the kinematic data collection rate of 60 Hz.
Data analysis:
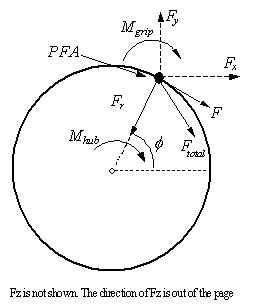
Although the hand can apply a moment about any of the three-dimensional coordinate axes, a previous study showed that gripping moments in the frontal and transverse planes were negligible [4]. Also these moments do not contribute to forward propulsion of the wheelchair or are considered in the mechanical efficiency calculation. Therefore, for this analysis we focused on quantifying gripping moments in the sagittal plane. The SMART Wheel measures the moment generated about the hub (M hub ) and the forces parallel (Fx) and perpendicular (Fy) to the horizontal. The SMART Wheel moment component consists of two parts, a gripping moment, M grip , and the moment, M PFA , generated by Fx and Fy (equation 1). To solve for M grip , moments generated by Fx and Fy must be computed which requires knowledge of the center of pressure or point of force application (PFA). The PFA is a point on the pushrim that best represents the location where the force is being applied [5]. Based on prior studies, this point lies between the 3 rd MCP joint and the midpoint of radial and ulnar styloid processes [6].
Knowledge of this point allows for the transformation from a global coordinate system (x,y,z) to a pushrim based r-t-n (tangential, radial, and normal) coordinate system (Figure1). An angle, f , is calculated between the horizontal and the PFA which is then used in equations 2 to transform the forces. The tangential force is then multiplied by the radius of the pushrim, R, to obtain the propulsion moment, M PFA (equation 3). Equation 1 is then solved in terms of M grip .
 |
|---|
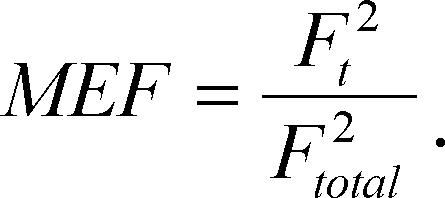
Mechanical efficiency is the ratio of tangential force (squared) and total resultant force (squared) (equation 4) . The resultant force is the vector summation of the all the forces exerted on the pushrim (Fx, Fy, and Fz). To demonstrate the influence of M grip on tangential force and mechanical efficiency, we considered two different ways to determine the tangential force either by direct measurement from the SMART Wheel s , Ft SW , (equation 5), or by using the PFA, Ft PFA , (equation 2). Then we used Ft SW , and Ft PFA in equation 4 to obtain mechanical efficiency, MEF SW and MEF PFA , respectively. If the M grip is negligible, the tangential force computed by these two equations should be equal.
 |
|---|
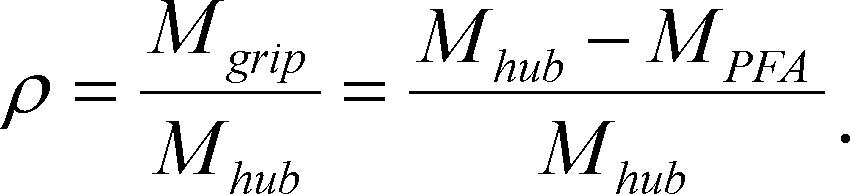
The means of M PFA , M hub , Ft PFA , Ft SW , MEF PFA and MEF SW were calculated for each stroke and averaged for ten consecutive strokes. For each parameter, data from all ten strokes on the right and left side were averaged together to provide a single kinetic value for the trial since there was a statistically significant correlation between both sides ( r > 0.77, p<0.001). To determine the effect of speed on gripping moment, a coefficient was created, r , which is the proportion of gripping moment relative to the measured moment at the hub (equation 6).
 |
|---|
Statistical Analysis:
The paired t-test statistic was used to determine the differences between following variables within speeds: 1) M grip , M hub , Ft PFA , Ft SW , MEF PFA and MEF SW , and r between speeds. All statistical analyses were completed using SAS software (SAS Institute, Inc.) and a value was set at 0.05.
RESULTS:
 |
|---|
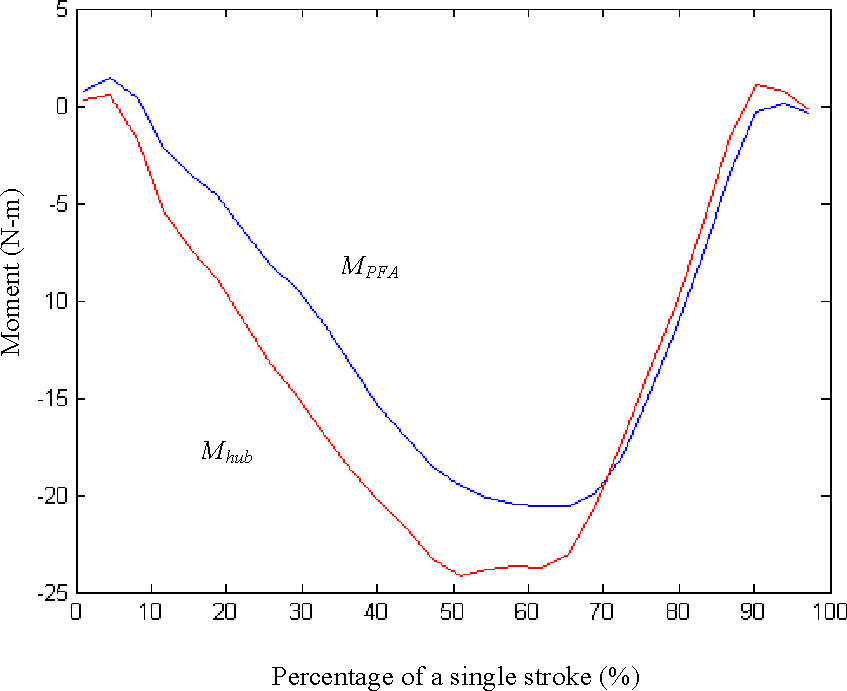
M hub was generally larger than M PFA (Figure2) indicating that the
gripping moments occurred in the same direction as propulsive moment. Both
tangential force and mechanical efficiency when calculated with the assumption
that M grip was negligible were significantly smaller for both speed conditions
(Table 1). Gripping moments comprised 14.2 + 6.2 % and 10.6 + 5.3 % of the
moments measured at the hub at the slow and fast speeds respectively (p=0.003).
|
0.9m/sec | 1.8m/sec | ||||
|---|---|---|---|---|---|---|
| SMART Wheels |
PFA | Paired t-test |
SMART Wheels | PFA | Paired t-test |
|
| Moments (N-m) | 8.00 + 2.40 | 7.13 + 2.34 | t = 4.72 P <0.001* |
8.72 + 2.72 | 8.13 + 2.52 | t = 2.97 P =0.007* |
| Ft (N) | 31.13 + 9.31 | 27.72 + 9.13 | t = 4.72 P <0.001* |
33.92 + 10.59 | 31.64 + 9.82 | t = 2.97 P =0.007* |
| MEF (%) | 54.56 + 17.94 | 45.41 + 9.48 | t = 3.53 P =0.002* |
44.12 + 16.60 | 39.45 + 9.85 | t = 2.52 P =0.02* |
| * denotes a significant difference (p<0.05) | ||||||
DISCUSSION:
Our results showed that differences existed between the measured moment at the hub and a moment computed using the applied pushrim forces and the PFA. These differences are caused by the hand and/or wrist exerting a gripping moment on the pushrim. The magnitude of these differenes, hence the gripping moments, were large enough to significantly effect the calculation of tangential force and mechanical efficiency. Ignoring gripping moments altogether could result in an underestimation of the tangential forces and mechanical efficiency if the gripping moments are positive (in the direction of rotation) or an overestimation if they are negative. In general these moments were found to be mostly positive, thus gripping moments facilitated the wheelchair user's ability to generate effective forces and improve propulsion efficiency. The gripping moments were more pronounced at the slower speed than the faster speed. This is likely due to the subjects being unable to fully grip the rim during the faster speed condition. Although gripping moments can empower MWUs to deliver greater effective forces and moment on the pushrim, sustained contraction of finger flexor muscles has been shown to increase the intra-carpal tunnel pressure which in turn puts pressure on the median nerve. Future studies should investigate the effect that coated or ergonomically shaped pushrims have on minimizing gripping moments
CONCLUSION:
Our findings revealed that gripping moments play a significant role in wheelchair propulsion and adds to a person's ability to generate tangential forces thereby increasing mechanical efficiency. Gripping moments are more pronounced at slower speeds than faster speeds because there is ample time to grip the pushrim during slow speeds. Although, gripping moments could help MWUs to improve their propulsion efficiency, they may also put them at risk for developing CTS.
REFERENCE:
- Veeger, H.E.J., Van der Woude, L.H.V., and Rozendal, R.H. (1991). Load on the upper extremity in manual wheelchair propulsion. Journal of Electromyography and Kinesiology ,1,270-280.
- Vansickle D.P, Cooper R.A, Boninger M.L, Robertson R.N, Shimada S.D (1998). A unified method for calculating the center of pressure during wheelchair propulsion. Annals of Biomedical Engineering , 26,328-336.
- Asato K.T, Cooper R.A, Robertson R.N, Ster J.F (1993). SMARTwheels: development and testing of a system for measuring manual wheelchair propulsion dynamics . IEEE Transaction on Biomedical Engineering , 40,1320-1324.
- Sabick, M.B., Zhao K.D., An K.N. (2001) A comparison of methods to compute the point of force application in handrim wheelchair propulsion: a technical note . Journal of Rehabilitation Research and Development ,38,57-68.
- Cooper, R.A., VanSickle, D.P., Robertson, R.N., Boninger, M.L., Ensminger, G.J. (1995). A method for analyzing center of pressure during manual wheelchair propulsion . IEEE Transaction on Rehabilitation Engineering , 3,289-298.
- [ooper R.A., Robertson R.N., VanSickle D.P., Boninger M.L., Shimada, S.D. (1996). Projection of the point of force application onto a palmar plane of the hand during wheelchair propulsion. IEEE Transaction on Rehabilitation Engineering , 4, 133142.
ACKNOWLEDGEMENTS:
This study was supported by U.S. Department of VA Affairs (project B689-RA and B2674-CA), Eastern Paralyzed Veterans of America, National Institutes of Health (NIH K08 HD 01122-01), and National Institute on Disability and Rehabilitation Research (NIDRR H133A011107) .
Yu-Sheng Yang,
Human Engineering Research Labs,
VA Pittsburgh Healthcare System,
Pittsburgh, PA 15216
Phone: (412) 365-4850,
Fax: (412) 365-4858,
Email:yuy7@pitt.edu.