Dan Ding1, PhD, Songfeng Guo1, PhD, Stephen Hayashi2, BS, Edmund F. Lopresti2, PhD, Richard Simpson1, PhD, Rory A. Cooper1, PhD
1Human Engineering Research Laboratories, VA Pittsburgh Healthcare System
Department of Rehabilitation Science and Technology, University of Pittsburgh
5044 Forbes Tower, Pittsburgh, PA 15260
2AT Sciences, Pittsburgh, PA 15213
ABSTRACT
The Smart Power Assistance Module (SPAM) is designed to provide independent and safe mobility to individuals with visual and physical impairments. The SPAM consists of pushrim-activated power-assist wheelchair (PAPAW) hubs and a combination of infrared and sonar sensors for navigation assistance. The “2 nd Generation SPAM” implements more reliable power assist control and obstacle avoidance algorithms. The effectiveness of the power assist algorithm was confirmed by the experiment where the SPAM was propelled down and up a slight slope. Future work includes the optimization of the power-assist control algorithm and effective shared control strategy for navigation assistance.
KEYWORDS
Pushrim-activated power-assisted wheelchair, Obstacle avoidance, Visual and physical impairments
INTRODUCTION
 |
|---|
Pushrim-activated power-assist wheelchairs (PAPAWs) were developed to reduce the physical fatigue strain of wheelchair users and improve wheelchair maneuverability on various driving environments where greater forces and endurance are required to propel regular manual wheelchairs, such as ramps, lawn and soft carpet [1], [5]-[6]. Previous studies proved that PAPAWs reduce the energy demands, stroke frequency, and overall joint range of motion for individuals with tetraplegia, when compared to traditional manual wheelchair propulsion [2]. The SPAM was developed based on a PAPAW, but uses a combination of infrared and sonar sensors to provide independent and safe mobility to non-ambulatory individuals with visual impairments by detecting obstacles near the wheelchair and using the motorized hubs to avoid these obstacles. A SPAM could also be useful for individuals who experience difficulty in moving a wheelchair inside a van, or in other confined spaces such as elevators and bathrooms. The first generation SPAM (see Figure 1) was implemented based on a commercial PAPAW (a JWII from Yamaha Motor Corporation) and its power-assist control algorithm [3]. In the second generation SPAM, we developed custom electronic circuitry (microprocessor, motor driver), and sensors for both power-assist and obstacle avoidance functions [4]. This approach allows us to provide much smoother and more robust control of the PAPAW. The software development of the second generation SPAM includes both the power-assist control algorithm, and the obstacle avoidance algorithm.
METHODS
The second generation SPAM enables the SPAM to detect the magnitude and direction of propulsion forces applied to the pushrims by using sets of linear compression springs, and a potentiometer. Two optical encoders were attached directly to each motor shaft to detect the driving speed and direction of each wheel [4]. Based on the wheel rotation speed/direction and the pushrim torque/direction, the power-assist control algorithm changes the duty ratio for each motor drive so that the wheelchair speed can be smoothly tuned. The design criterion was to enable a consistent easy and smooth ride.
There are four operation modes for the power-assist control architecture.
- Standby Mode
- If little or no torque is applied to each pushrim and there is no or little speed on each wheel, the SPAM is in a standby mode where the brakes are engaged.
- Slow Down Mode
- If little or no torque is applied to each pushrim, but the speed for one or both wheels exceeds a threshold level, the SPAM enters the slow down mode, where the duty ratio for each motor drive is reduced by a certain factor so that the SPAM will gradually decelerate to stop without any abrupt movement.
- Power Assist Mode
- If the torque applied to the pushrim exceeds a threshold level and there is little or no speed on the wheel, the SPAM enters the power assist mode, where the duty ratio for each motor drive is set proportionally to the pushrim torque signals. The larger the applied torque, the faster the wheelchair will move.
If both the torque applied to the pushrim and the wheel speed exceed their threshold levels, the wheel rotation direction is examined to decide whether the power assist mode or the slow down mode should be executed. If the wheel rotation direction is opposite to the applied torque direction, the user could intend to change the direction of travel or stop the wheelchair, and thus the slow down mode will be activated first to gradually decrease the chair speed along the current heading direction, which eliminated a sudden direction transition. Otherwise, the power assist mode will be executed. - Stop Mode
- A switch button was mounted for emergency stop. Once it is pressed, the wheelchair will quickly come to a stop by decreasing the duty ratio at a faster rate than the slow down mode.
In the first generation SPAM, seven sensor modules including 7 sonar and 7 infrared sensors were mounted to the wheelchair’s frame and an aluminum bar at arm-rest height. If obstacles are detected within the specified minimum distance around the wheelchair, the wheelchair will be stopped. In the second generation, more sensor modules were added to cover a 360 o angle of view to detect obstacles, and each sensor’s position along the chair frame and orientation can be slightly adjusted. Eighteen sensor modules are placed on the wheelchair frame, front lap bar, and rear bar facing forward, rearward, and downward. The vector force field (VFF) algorithm will be used for obstacle avoidance, where every object detected by the sensor modules exerts a repulsive force on the wheelchair’s direction of travel.
RESULTS
 |
|---|
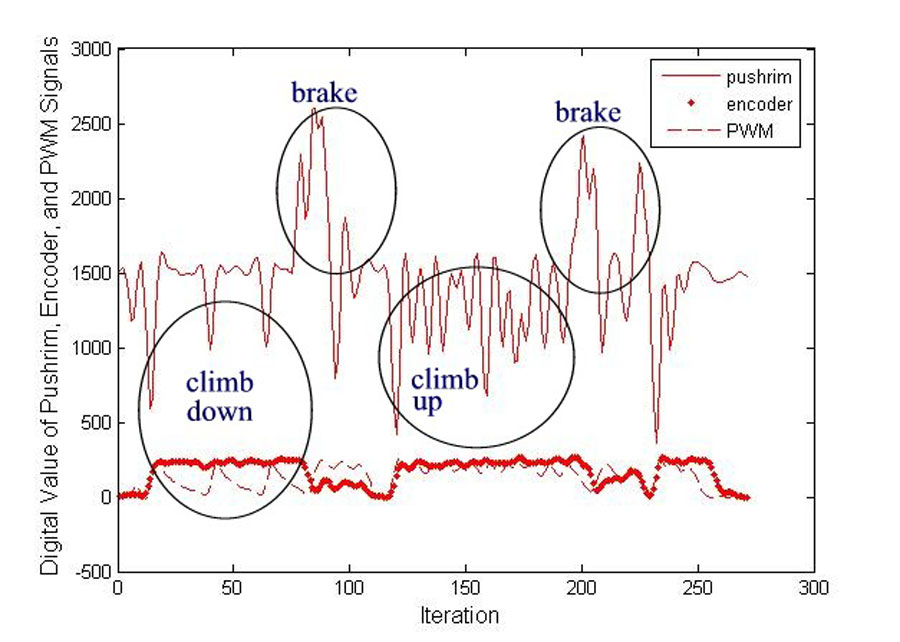
The power-assist control algorithm was tested and worked to specification. Figure 2 plots the pushrim torque signals, wheel speed signals from encoders, and PWM signals that were sent to motors of one drive wheel, when the SPAM was propelled down and up a slight slope (about 0.7 o gradient). There were three major strokes to propel the SPAM down the slope for about 30 meters, and about ten strokes for climbing up the same distance. The wheelchair was stopped by applying a reverse torque on the pushrim at the end of the down and up climbing periods, respectively. At the end of the trial, the stop button was triggered for an emergency stop. The software gains could be adjusted for more or less power assist and slow or quick emergency stop.
DISCUSSION
Though the power-assist control algorithm exhibits its functionality, it needs to be further optimized. From the experiment, it took more frequent strokes to climb up due to the fact that the SPAM cannot sense the terrain and adjust its gain accordingly. An inclinometer could be added to provide terrain information as a reference for automatic gain tuning. In addition, the algorithm should be able to detect any failure in the system and stop the power assist function in order to enhance safety. The calibration between the PWM duty ratio and wheelchair speed will be conducted to provide reference for the obstacle avoidance algorithm regarding effective stop distances, wheelchair deceleration, and reaction time etc.
Future work will also mainly focus on the obstacle avoidance algorithm, including the shared control strategy to enable effective joint control by the operator and the software module, and sensor fire strategy to reduce the impact of sensor cross-talks.
REFERENCES
- Cooper, R.A., Corfman, T.A., Fitzgerald, S.G., Boninger, M.L., Speath, D.M., Ammer, W., and Arva, J., “Performance assessment of a pushrim-activated power-assisted wheelchair control system”, IEEE Transactions on Control Systems Technology, 2002, 10(1):121-126.
- Algood, S.D., Cooper, R.A., Fitzgerald, S.G., Cooper, R., Boninger, M.L., “Impact of Pushrim-Activated Power-Assisted Wheelchair on the Metabolic Demands, Stroke Frequency, and Range of Motion Among Subjects with Tetraplegia,” Archives of Physical Medicine and Rehabilitation (Model Systems Issue), 2004, 85(11):1865-1871.
- Simpson, R., LoPresti, E., Hayashi, S., Guo, S.F., Ding, D., and Cooper, R., “Smart power assistance module for manual wheelchairs”, 2003 RESNA Annual Conference, CD-ROM.
- Frisch, R., Guo S.F., Cooper, R.A., LoPresti, E.F., Simpson, R., Hayashi, S., and Ammer, B., “Hardware design of the smart power assistance module for manual wheelchairs”, 2004 RESNA Annual Conference, CD-ROM.
- Kakimoto, A., Funakubo, A., Suzuki, S. and Sekiguchi, Y., “Development of wheelchair with assistive power unit,” IEEE EMBS Conference, 1994, 496-97.
- Miyazawa, T., Katsura, S., and Ohnishi, K., “A power-assisted wheelchair taking running environment into account,” IEEE EMBS Conference, 2003, 1343-1348.
ACKNOWLEGEMENTS
The work is supported by a Phase I Small Business Innovation Research Grant from the National Eye Institute (#1R43EY014490-01)
Author Contact Information:
Dan Ding
Human Engineering Research Laboratories
VA Pittsburgh Healthcare System 151R-1
7180 Highland Drive
Pittsburgh, PA 15206
412-365-4850
dad5@pitt.edu