Seong-Wook Hong , PhD , Vlad Patrangenaru, BS, William Singhose , PhD, Stephen Sprigle , PhD
Georgia Institute of Technology, Atlanta, GA 30332-0405
ABSTRACT
Involuntary extensor t hrusts experienced by some wheelchair users may cause injuries via impact with the wheelchair , l ead to the person sliding out of the seat , and also damage the wheelchair. The concept of a dynamic seat that allows movement during the extensor thrust event is a potential solution without any sacrifice of the occupant’s freedom. Knowledge of the motion and forces during unconstrained extensor thrust events is essential in designing effective and comfortable dynamic seats. This study develops a system for identifying human-generated motion and forces during unconstrained extensor thrust events. An experimental system is established to measure human body motion and forces at the footrest and the seatback. Unmeasured forces and torques are determined using an inverse dynamic approach.
KEYWORDS
Extensor thrust ; wheelchair ; dynamic seat; inverse dynamic approach
BACKGROUND
Wheelchair users with neurological disorders may undergo involuntary extensor thrust resulting in injuries to themselves and damage to the wheelchairs. An often used treatment for reducing these risks is, though uncomfortable and possibly painful, to highly constrain them in their wheelchairs. To provide greater personal freedom and prevent secondary injuries to these wheelchair users with severe extensor thrust tone, the concept of a “dynamic seat,” which implies a seat moving with respect to the wheelchair frame during extensor thrust events, has been introduced (1-3) and recently commercialized (e.g., 4). Knowledge of human-generated forces and motions during extensor thrust events should be a key factor for proper design of a dynamic seat.
Attempts have been made to quantify the strength of thrust by measuring the forces and torques during an extensor thrust event (2,5). However, there are few reported results regarding the extension motions and forces generated during unconstrained extensor thrust events.
RESEARCH OBJECTIVE
The objective of this study is to develop a measurement system for human-generated forces and motions during unconstrained extensor thrust events. T h is study shows the adequacy of the developed system and also investigates t he effects of the speed of extensor thrust event, the footrest angle and seatback angle of the chair through experiments.
METHOD
 |
|---|
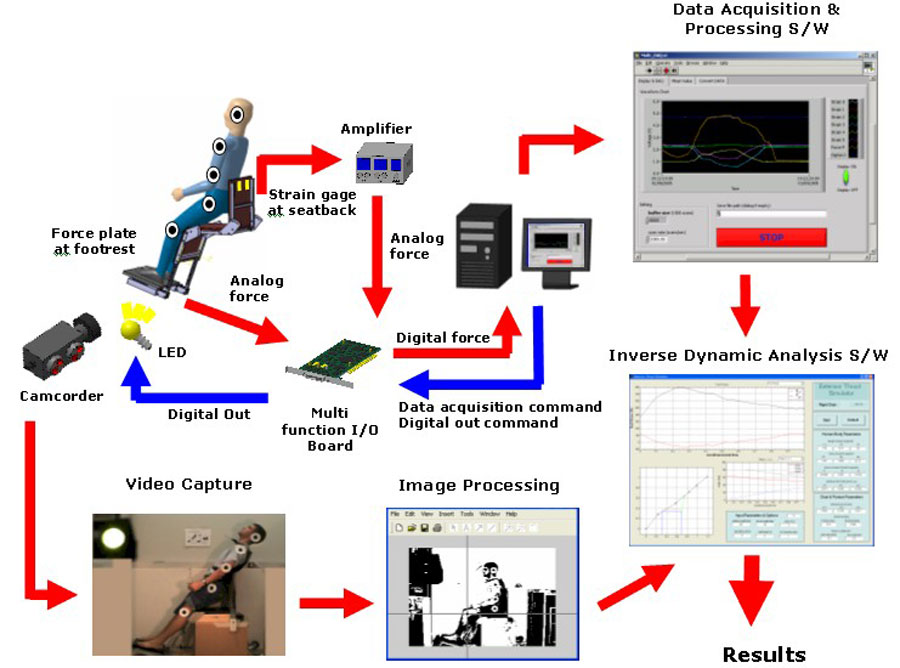
An experimental system is developed to provide measurements of chair forces and human body motion during an unconstrained extensor thrust event.
The experimental chair has adjustable joint angles and leg rest length. The force measurement plate on the foot rest measures the force normal to the foot rest and the strain gages attached to the seat posts measure the seatback force. Human body positions and angles are extracted by tracking markers attached to the human subject using a digital video camera. If only one coordinate is measured, the other coordinates can be estimated from the kinematic relations. With the measured and/or estimated position information, one can obtain the velocity and acceleration data by using numerical or analytical differentiation and the kinematic relations.
 |
|---|
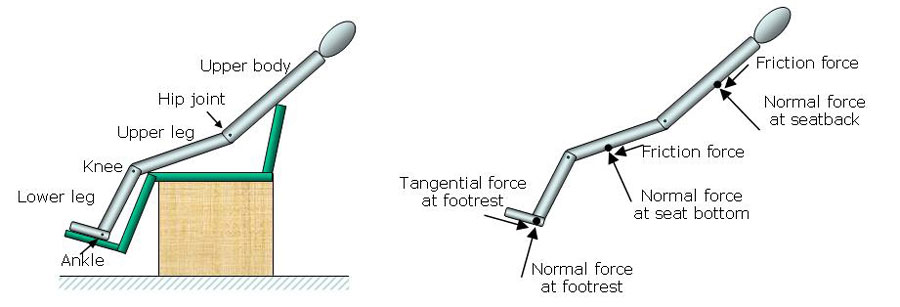
An inverse dynamic approach is employed to estimate the unmeasured forces and torques. The equations of motion for the simple human body model shown in Figure 2 can be written as d:

Rearranging the unmeasured force components in Equation 1 provides the identification formula for unmeasured force and torques d:
![]()
If the number of unknown force components is equal to the rank of the system matrix, then the equation gives a unique set of estimates. In this case, one force measurement is required. However, if more than one measurement is available, then the solution can be attained in a least-square-error sense.
RESULTS
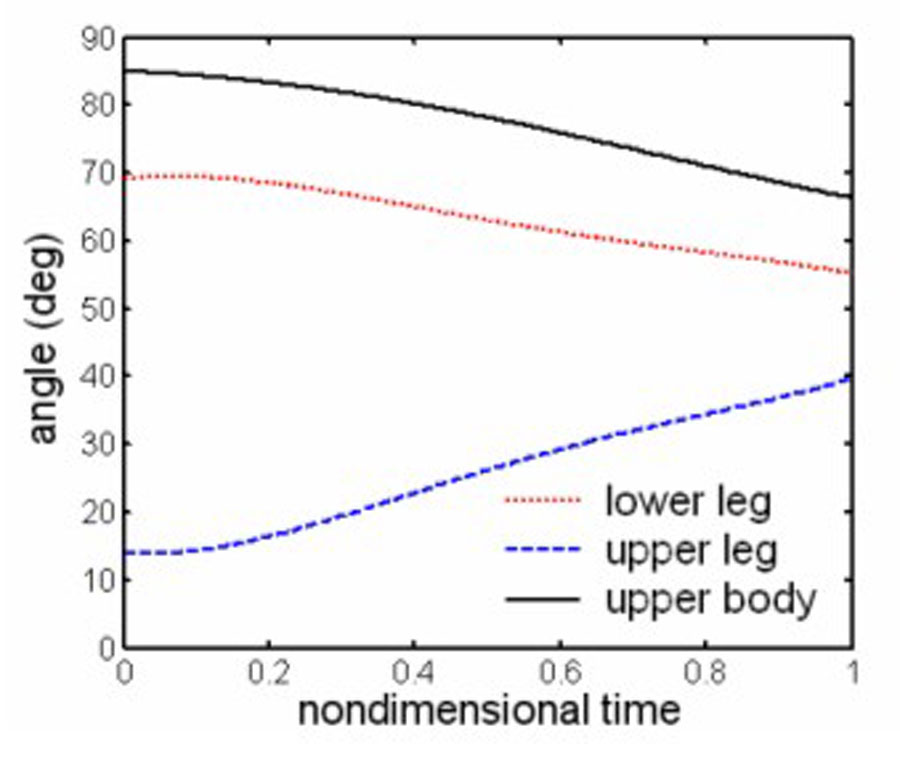
Experiments are executed by measuring motion and determining forces from people pretending to undergo extensor thrust. To show the effects of the chair configuration, three experiments were performed while changing the foot rest and seatback angles. Figure 3 shows a representative set of measured angular displacements versus non-dimensional time which is defined as the time divided by the duration of extensor thrust event.
 |
|---|
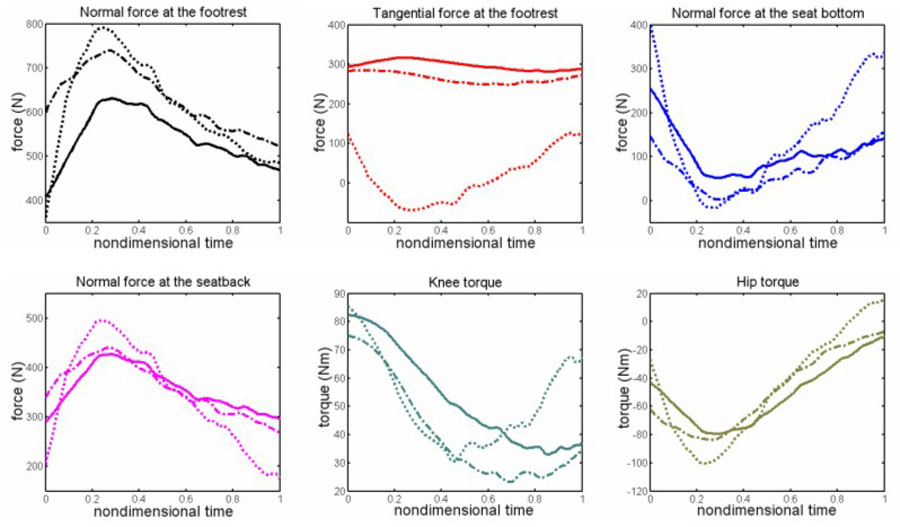
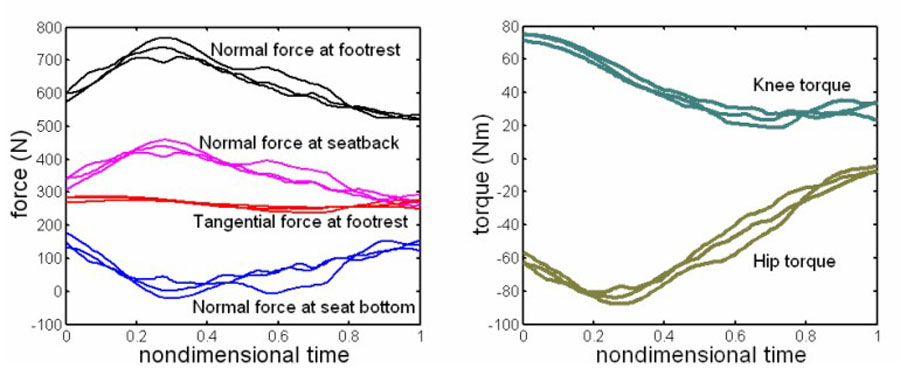
One of these measured angular displacements is used for estimating the other coordinates based on the kinematic relations. The measured and estimated coordinates and their derivatives can be used to estimate unmeasured forces and torques, as well as to analyze the characteristics of the human subject. Figure 4 shows all the forces and torques measured or estimated through the inverse dynamic formula given in (2).
 |
|---|
Overall, change of the footrest and seatback angles significantly influences all the human-generated forces and torques. This implies a dynamic seat equipped with a flexible seatback and an articulating footrest might be able to manipulate the human-generated forces during extensor thrust events.
Experiments were also performed to evaluate the effects of extensor thrust speed. Figure 5 shows the identified forces and torques while changing the duration of the extensor thrust from approximately 0.8 seconds to 2.0 seconds.
 |
|---|
The overall pattern of the forces and torques does not depend greatly on the speed. Increasing the speed barely affects the force and torque patterns, but somewhat affects the change in peak values of the forces and torques. This implies that the gravity forces dominate throughout the event.
DISCUSSION
The experimental system was repeatable and reliable through several experiments. The experimental results also demonstrated the effects of footrest and seatback angles that would be helpful for conceptualizing more comfortable and safer seats with a flexible seatback and an articulating footrest mechanism.
Further work will concentrate on developing a system for the design and testing of dynamic seats with a flexible seatback and an articulating footrest mechanism. The developed system can be easily expanded to accommodate these dynamic seats. Since the dynamic seat components provide additional force-deformation relations, no further force measurement is required to estimate unknown forces. It is noteworthy that the dynamic seat chair model must incorporate the formula and experimental results with the fixed, rigid seat chair system because it is represented by the rigid seat if the applied loads are below the preloads of the dynamic seat mechanisms.
REFERENCES
- Zeltwanger A.P., Brown D, Bertocci G. (June 2001). Utilizing computer modeling in the development of a dynamic seating system. 24 th RESNA, Reno, NV.
- Brown D., Zeltwanger A.P., Bertocci G., Burdett R, Fitzgerald S, and Trefler E. (June 2001). Quantification of forces associated with episodic full-body extensor spasticity in children. 24 th RESNA, Reno, NV.
- Hong SW, Seomoon H, Patrangenaru V, Singhose W and Sprigle S, (Feb. 2005), An efficient identification method for human-generated forces during extensor thrust. To be presented at Biomedical Engineering Conference 2005, Innsbruck, Austria.
- Miller’s Adaptive Technologies, Product Catalog, (2004).
- Engsberg J.R., Olree K.S., Ross S.A., Park T.S. (1996). Quantitative clinical measure of spasticity in children with cerebral palsy. Archives of Physical Medicine and Rehabilitation 77, 594-599 .
Author Contact Information:
Seong-Wook Hong, Ph.D
Georgia Institute of Technology
813 Ferst Dr., N.W.
GA 30332-0405
Phone ( 404 ) 385-6335 (until Feb-20-05)
011-82-54-478-7344 (from Feb-21-05)
EMAIL: swhong @ kumoh.ac.kr