29th Annual RESNA Conference Proceedings
Design of a Glide Control Device for a Manual Wheelchair
Bonniejean Boettcher
1, BS, Timothy McLean
1, BS, Kenneth Sundberg
1, BS, Bruce Klockars
2, MEd, Allen H. Hoffman
1, PhD
1Mechanical Engineering Department, Worcester Polytechnic Institute, Worcester, MA 01609
2Adaptive Equipment Services, Monson Developmental Center, Palmer, MA 01069
ABSTRACT
A resident at the Monson Developmental Center diagnosed with autism and profound mental retardation propels his manual wheelchair backward at high speeds, presenting a safety hazard to himself and those around him. A device was designed, built, and delivered to the client that relies on belt friction to provide adjustable glide control. The magnitude and adjustability of the glide control afforded by the device successfully reduced the safety hazard while still allowing the client the freedom to maneuver independently about the facility.
KEYWORDS
manual wheelchairs, glide control, friction belt
BACKGROUND/PURPOSE:
 Photo 1: d Client propelling himself in his manual wheelchair (Click image for larger view)
Photo 1: d Client propelling himself in his manual wheelchair (Click image for larger view) The client for this project is 45 year old man who resides at the Monson Developmental Center. His official diagnosis includes autism and profound mental retardation. His primary method of mobility is via a manual wheelchair which he typically propels backward by pushing on the floor with his right foot while looking over his left shoulder and using his left hand on the rim of the wheel for steering and braking. The client's limited range of vision while moving backward coupled with his ability to attain a high velocity and greatly increased glide causes a safety hazard to himself and those around him (Photo 1).
He had a history of hitting objects and people and had on rare occasions tipped his chair. However, the client is happiest when allowed to build speed and move unrestricted throughout the facility. The caregivers at the facility wished to allow him maximum freedom of mobility but wanted to limit the possibility of harm to him or other residents and also reduce the possible damage to his wheelchair and the surroundings.
An initial search for commercial glide control devices for manual wheelchairs was unsuccessful. It was felt that the need for this type of product may be limited because some manual wheelchair users may elect to use powered wheelchairs or scooters to gain improved control of speed and glide. The client was not a candidate for a powered wheelchair since it was determined that the controls would be too complicated for him to master. In addition, changing to powered mobility would eliminate his ability to vigorously exercise by propelling his wheelchair and also eliminate an activity which he enjoys.
Several attempts were made to control chair glide and velocity including attachment of anti-rollback devices, attachment of an un-powered motor to the rear wheels to increase rolling resistance, addition of a weight to the chair to act as an anchor, and compression of the wheel bearings through over-tightening. All of these solutions proved to be temporary because they either caused additional complications (e.g. the "anchor" frequently caught on furniture in the facility) and/or led to eventual damage to chair components. A frictional governor was constructed using a set of washers, one moving with the wheel and the other stationary with respect to the wheelchair frame. Friction caused by forcing the washers acted to slow the chair. However, this arrangement had an insufficient range of adjustment.
OBJECTIVE
The primary goal of this project was to design a glide control device for a manually operated wheelchair that would limit the resident's velocity and glide and that could be easily adjusted for appropriate use in different parts of the facility. The device had to be inaccessible to the client and yet easily accessible and operable for the caregivers. The mechanism itself was to operate when the wheelchair was moving in any direction. A secondary, broader goal was to create a design that could be easily adapted to other clients with different requirements.
SOLUTIONS CONSIDERED:
After determining that a unique design was necessary, specifications were developed to encompass the quantitative needs of the design. Some of the specifications rated most important by the caregivers included that the design not increase the total weight of the chair by more than 15 lbs, provide for adjustment of glide and speed over a wide range of values, require maintenance no more than once a month, cost under $350 to manufacture, function for at least 3-4 years, produce an equal amount of glide resistance to both rear wheels, be inaccessible to the client while he was seated in his chair, and not compromise the client's safety.
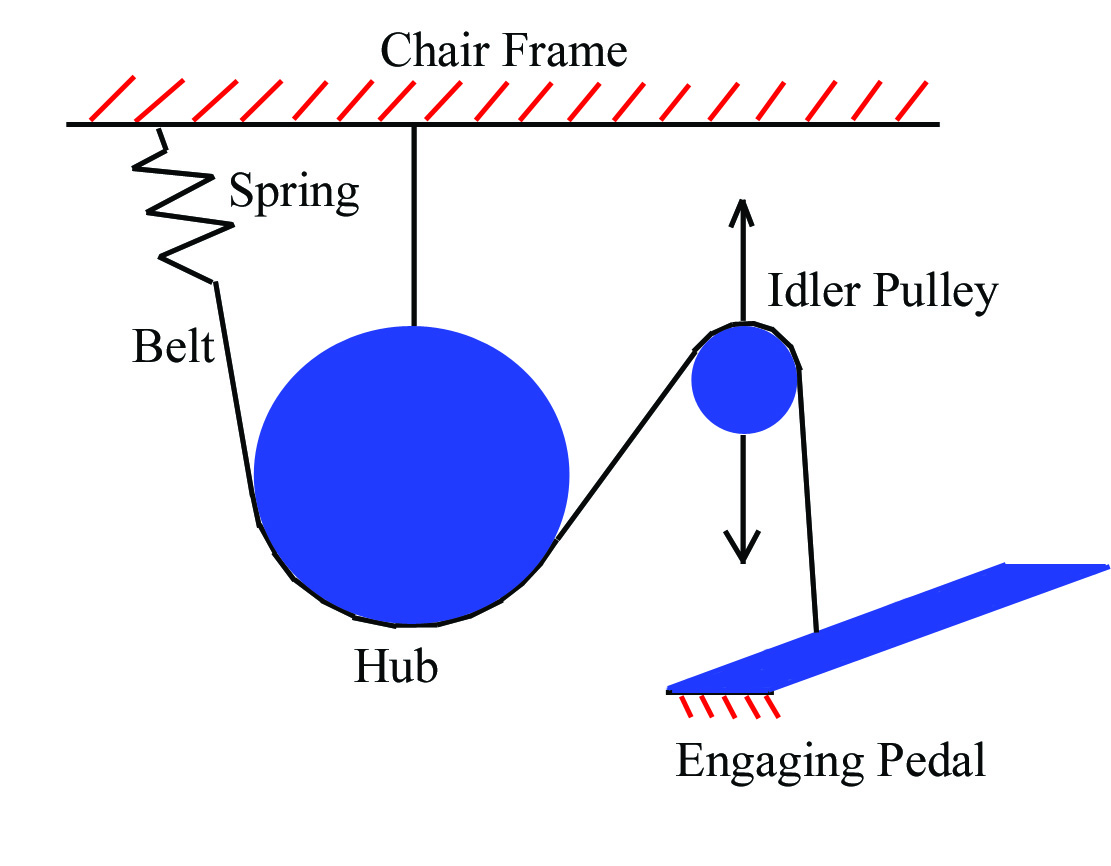 Figure 1: d Friction Belt Assembly (Click image for larger view)
Figure 1: d Friction Belt Assembly (Click image for larger view)
A number of preliminary design concepts were developed that could meet these criteria. These concepts consisted primarily of devices which employed either friction and/or a method of depressing the wheels slightly to slow the chair and control the glide. A friction belt was chosen for the final design because it afforded the widest range of adjustability (1). Figure 1 depicts the mechanism by which the friction belt controls the glide.
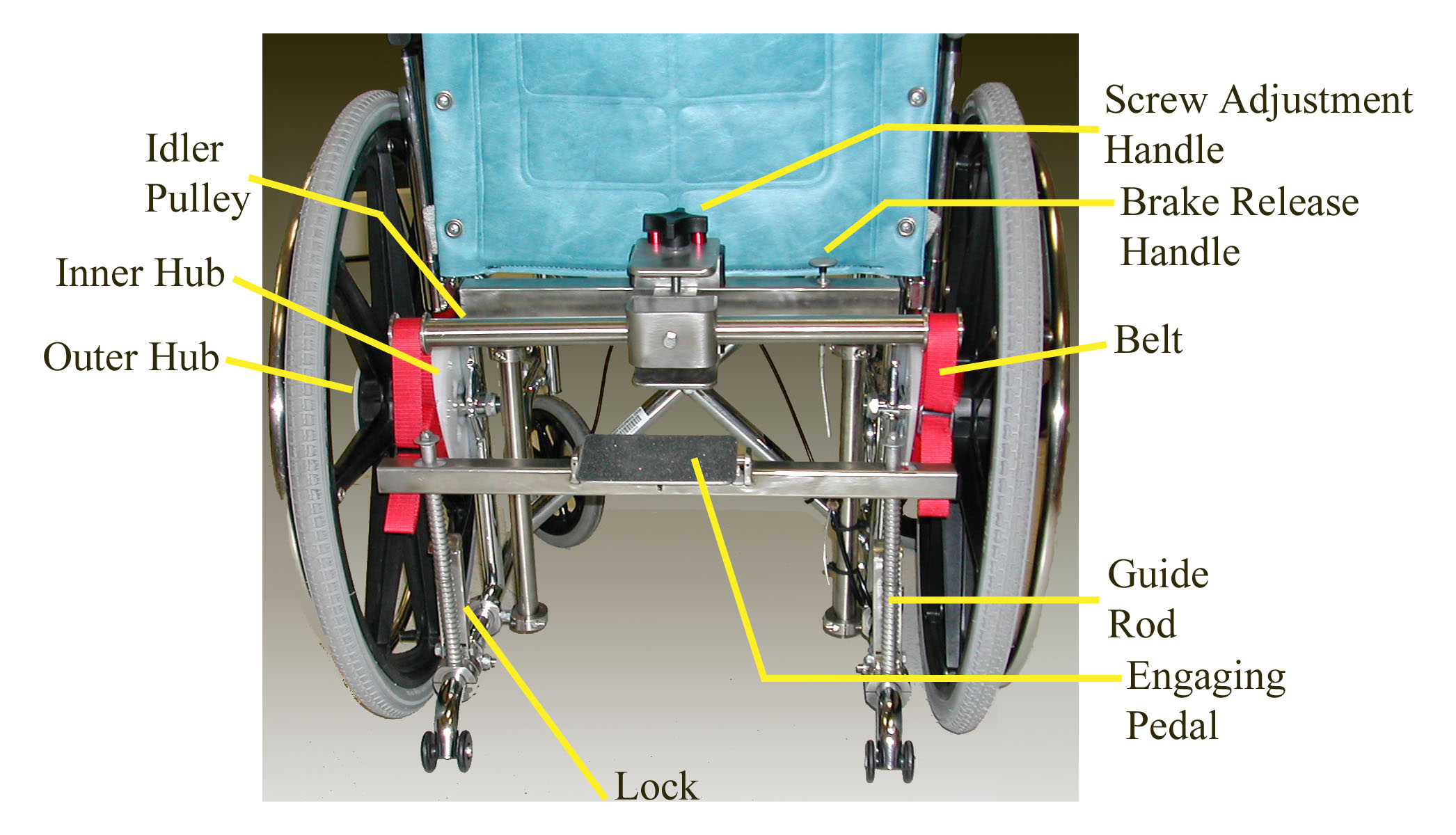 Photo 2: d Glide Control Device (Click image for larger view)
Photo 2: d Glide Control Device (Click image for larger view)
A hub is attached to each rear wheel and a friction belt contacts the hub over approximately 150 o of wrap. Each belt is attached to the chair frame via a spring on one end and to an engaging pedal on the other end. Between these two attachment points, the belt passes over the hub and also over an idler pulley. Depressing the engaging pedal creates a tension in the belt. When the chair is in motion, the hub turns with the wheelchair wheels, and friction is created between the belt and the hub. The torque produced by the friction between the belt and hub controls the glide of the wheelchair. Each idler pulley is attached to a common horizontal bar whose vertical position can be changed using an adjustment screw (Photo 2). Use of a common mounting bar for both idler pulleys and a common engaging pedal insures that a balanced frictional torque is created on each wheel. The combination of the spring and the adjustment screw allow the belt tension to be varied over a wide range.
To operate the device, the engaging pedal is depressed until the locking mechanism locks it into place. The belt tension can be adjusted by rotating the adjustment handle to raise or lower the idler pulleys and can be performed when the device is either engaged or disengaged. To disengage the device, a release handle is raised, pulling a cable connected to the hinged locks, which pivot and release the engaging pedal. The device components are easily accessible to the caregivers for both operation and maintenance yet are inaccessible to the client.
EVALUATION
Initial evaluations were performed in our laboratory to determine the degree to which the design met the specifications. The total cost of the device was $240, which was considerably less than the allotted $350. A wide range of adjustability was obtained. The device provided 13 complete rotations of the adjustment knob between unrestricted motion and the wheels locked setting. Four volunteers of similar stature to the client propelled the wheelchair backwards using their right feet on linoleum, carpeting, and hardwood surfaces. When the device was engaged at a midrange setting, the maximum backward glide was approximately 5 - 7 ft per leg push. The volunteers also rated freedom of mobility with the limited glide, the safety against tipping, and confirmed that the engaging and adjustment mechanisms were inaccessible while seated in the wheelchair. Three additional volunteers were recruited to simulate the caregivers. They rated the ease and intuitiveness of using the device. The device was delivered in May of 2002. Some initial minor modifications were required. The most significant was the addition of a shin height protective bar across the rear of the wheelchair to prevent the engaging pedal from being the primary contact point with other seated residents. The device was placed in service in August 2002 and has been in continuous use since that time. Due to extreme use, the client's wheelchair is on a bi-monthly preventative maintenance inspection schedule. Many wheelchair components have been replaced. The facility has continued to make minor improvements to the glide control mechanism that are directed at improving the strength and durability of device. No major repairs have been required. In a December 2005 review by the team assigned to the client's care, there was universal positive feedback regarding the device and its ability to achieve slower speeds, provide a significant reduction in collisions and injuries, and retain the client's ability to exercise and be freely mobile. Original concerns that limiting his propulsion might result in frustration have not been demonstrated.
DISCUSSION:
An original design for a glide control device for a manual wheelchair was successfully conceived, constructed, tested, and delivered to the client. After more than 3 years of use, the device has met all of the original design criteria specific to the client. The broader design goal of a device that could meet the needs of a larger client base has also been achieved. The friction belt design could be easily modified and applied to a variety of wheelchairs and user needs where glide and velocity control is required. Our application required that the engaging and adjustment mechanisms be inaccessible to the user. The design could be modified to make these mechanisms user accessible. This modification would give manual wheelchair users increased control in situations where glide and velocity can become dangerous, for example when navigating longer inclined surfaces such as city sidewalks.
REFERENCES
- Beer, F.P., Johnston, E. R. (1996). Vector Mechanics for Engineers: Statics (6 th ed.). New York, NY: McGraw-Hill Companies, Inc.
ACKNOWLEDGEMENTS
We gratefully acknowledge the contributions of the staff at the Monson Developmental Center who provided comments on the use and effectiveness of the device.
Author Contact Information
Bonniejean Boettcher, BS,
Worcester Polytechnic Institute
Higgins Labs Room 130
100 Institute Road
Worcester, MA 01609
Office Phone (508) 831-6035
EMAIL: jeanieb@wpi.edu
This should be in the right column.