29th Annual RESNA Conference Proceedings
A Wheelchair Driving Simulation For People With Low Visual Attention Span.
Harshal P. Mahajan, MS; Donald M. Spaeth, ATP, PhD; Alex J. Bevly III, MS; Dan Ding, PhD, Rory A. Cooper, PhD.
Human Engineering Research Laboratories, VA Pittsburgh Healthcare System
Department of Rehabilitation Science and Technology , University of Pittsburgh
ABSTRACT
Communication and mobility are a person's primary needs. Some people with Traumatic Brain Injury (TBI) face difficulties in performing complex visio spatial tasks such as driving a power wheelchair. Computer based virtual environments are inherently safe and can be customized for the user. Hence they are a preferred option for initial driving training. This paper discusses the development of such a 2D computer based simulation for training and evaluating the wheelchair driving performance using a prototype isometric joystick.
KEYWORDS:
2D Wheelchair driving simulator, virtual reality, head position monitor, isometric joystick
BACKGROUND
Some people with traumatic brain injury (TBI) experience visual field and compromised attention spans [1]. This makes the task of electric powered wheelchair (EPW) driving difficult and sometimes dangerous for them, especially if they don't have prior experience in driving. Independence in mobility has positive reinforcements towards improving the quality of life of people with disabilities [2] and hence steps should be taken to teach them to drive an EPW. Such training in real world would require supervision by the therapist to ensure safety of the user. A virtual environment is inherently safe for training purposes and virtual wheelchair driving performance has been shown to correlate well with the performance real world [3].
Highly immersive Virtual Reality (VR) environments have been developed [4] for this purpose but they are expensive to implement in a small clinical setting. Further, cyber sickness experienced due to such environments [5] and their operational complexity place limitations to their clinical use. These are some reasons computer based wheelchair driving simulators are developed in recent years.
Current research at Human Engineering Research Laboratories (HERL) is aimed to develop a clinically relevant computer based training environment, especially for people with limited cognitive abilities for training EPW driving using an isometric joystick.
GENERAL DESCRIPTION
The virtual wheelchair driving software (VWDS) runs on the operator's computer with a large television screen (27") display. The user sits in a stationary wheelchair and operates the simulation with the isometric joystick. He/she wears a hat with magnet attached to it posteriorly and rests his/her head on the headrest shaped head position monitor (HPM). The HPM has strategically mounted Hall Effect transistors that aid in detecting orientation of user's head by magnetic triangulation [6].
SOFTWARE DESIGN
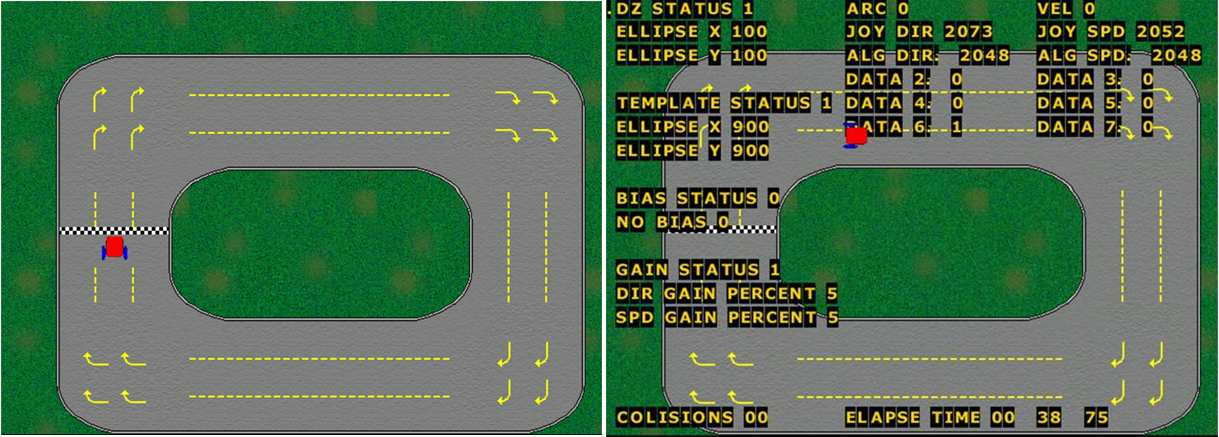
FIGURE 1: Screen shots of driving simulator software (Click image for larger view)
Presently the VWDS developed at HERL is a non immersive 2D simulation. The user operates the joystick to move a wheelchair sprite on a stationary track seen from a bird's eye viewpoint (Figure 1). Apart from the rectangular track 4 other tracks may be selected for evaluating turns and straight line motion. The backend software handles joystick input processing and mainly consists of following four modules. The flow of control between them is shown in figure 2.
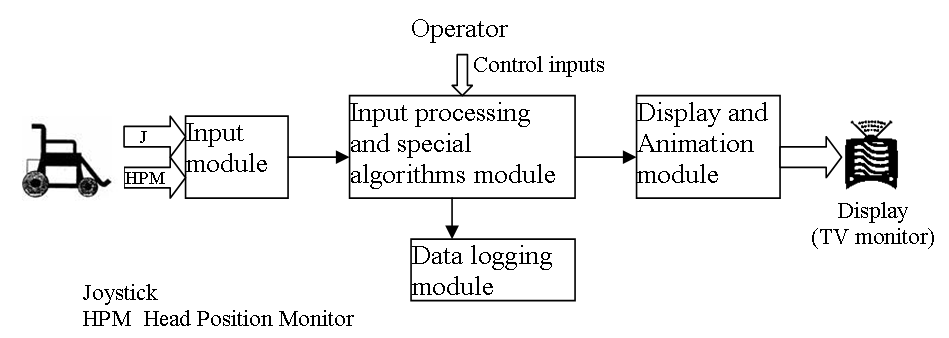 FIGURE 2. Block diagram of software for driving simulator (Click image for larger view)
FIGURE 2. Block diagram of software for driving simulator (Click image for larger view)
Input module:
- Reads raw force and direction data from the joystick controller and magnet proximity data from HPM through a serial port of computer.
Input processing and special algorithms module:
- This is the core module of the system where special algorithms are implemented to improve driving characteristics of isometric joystick and monitoring head orientation takes place.
- There are customizable modules which help to adjust joystick gain, simulate physical templates of joystick in software (ellipse, square, diamond, and asteroid), simulate software dead zones (circle, square, rectangle, and ellipse), and help adjust rotation of bias axis (0 to 359°) [7].
- This module compares the direction of user's intention of motion (from joystick input) with the head orientation information (from HPM). The wheelchair sprite is moved only if both these directions of motion are congruent and it is not moved otherwise. This way the user is cued to "look" in direction of the intended motion.
- The speed, acceleration, deceleration, and rotational response of the wheelchair sprite is modeled to emulate a differentially steered vehicle (DSV) based on the real world performance of a Quickie P 300 EPW driven using an isometric joystick.
- The user is instructed to keep the wheelchair sprite close to the two yellow lines drawn on the track (see figure 1). A simple collision detection algorithm detects when the wheelchair sprite hits track boundaries and audio visual feedback is provided to the user.
Display and Animation module:
- This unit manages the user interface and motion of wheelchair sprite in simulation.
- Whenever required by the operator it can display parameters such as time elapsed since start of program, force values from speed and direction axii of joystick, number of collisions, and velocity of sprite. It is from here (see figure 1) the operator can modify parameters for selecting template type, dead zone, bias axis rotation, and gains for the joystick.
Data logging module:
- This module keeps log of parameters like force input from the joystick and number of collisions of wheelchair sprite with track boundaries. These parameters are saved for future analysis.
SOFTWARE VERIFICATION & VALIDATION
FDA guidelines [8] are followed during the ongoing development and validation of the simulation software. Structural testing was performed to detect "dead code" that is never executed and that code was replaced. Software specifications for the user interface and implementation of specialized algorithms have been implemented and are currently in the process of validation.
DISCUSSION
The physical construction of isometric joystick does not allow for features like template (constraints to joystick motion during application of maximum force) and dead zones. These features are implemented through software as they play an important role in tremor suppression and make the wheelchair sprite appear to be stable (simulating inertia of actual wheelchair). The bias axis and gain of joystick may be adjusted in software for better tuning the joystick according to the user's needs.
The present simulation faces some limitations in portability across systems and in implementation of contact detection algorithm. Other than halting wheelchair if the direction of visual focus and head orientation are different currently there is no other feedback provided to the user.
FUTURE DIRECTIONS
Stringent verification and validation techniques will be implemented to make wheelchair motion in simulation closer to real world driving. The presently developed 2D interface has advantages due to its simplicity in implementing and validating real world wheelchair behavior. A slightly more immersive computer based 3D environment may be a next step in the development process after adequate confidence from the 2D interface.
REFERENCES
- Rose FD, Brooks BM, Rizzo AA. (2005). Virtual reality in brain damage rehabilitation: review. Cyberpsychology and Behavior , 8(3):241-62; discussion 263-71.
- Davies A, De Souza LH, Frank AO. (2003). Changes in the quality of life in severely disabled people following provision of powered indoor/outdoor chairs. Disability and Rehabilitation , 25(6):286-90.
- Arns, L. L., Cerney, M. M. (2005). The Relationship between age and incidence of cybersickness among immersive environment users. VR IEEE Virtual Reality Conference 2005 (VR'05) , 267-268.
- Swan, J. E. II, Stredney, D., Carlson, W., & Blostein, B. (1994). The determination of wheelchair user proficiency and environmental accessibility through virtual simulation. Proceedings of the Second Annual International Conference: "Virtual Reality and Persons with Disabilities" , California State University, Northridge, California: CENTER ON DISABILITIES, 156-161.
- Cooper, R.A., Spaeth, D.M., Jones, D.K., Boninger, M.L., Fitzgerald, S.G., Guo, S. (2002). Comparison of virtual and real electric powered wheelchair driving using a position sensing joystick and an isometric joystick. Medical Engineering & Physics, 24(10) , 703-708.
- Bevly III, A.J., Spaeth, D.M., Cooper, R.A. (2005) Determining Head Position to Assist Electric-Powered Wheelchair Operation for Persons with Traumatic Brain Injury. Proceedings of the 28 th RESNA Annual Conference. June 2005, Atlanta, Georgia.
- Ding D., Cooper R.A., Spaeth D. (2004) Isometric joystick tuning interface and assessment. Proceedings of the RESNA 27 th International Conference: Technology and Disability: Research, Design, Practice and Policy. Arlington, VA: RESNA Press.
- U.S. Department Of Health and Human Services, Food and Drug Administration (2002). General Principles of Software Validation; Final Guidance for Industry and FDA Staff. Retrieved January 4, 2006 from http://www.fda.gov/cdrh/comp/guidance/938.html .
ACKNOWLEGEMENTS
This research is supported by the University of Pittsburgh Model Center for Traumatic Brain Injury (TBI) Model Systems Grant H133A020502.
AUTHOR CONTACT INFORMATION
Donald Spaeth
Human Engineering Research Laboratories
VA Pittsburgh Healthcare System
151R1, 7180 Highland Drive
Pittsburgh, PA 15206.
412-365-4850.
spaethd@herlpitt.edu .
This should be in the right column.