Development of Customizable Algorithms for an Isometric Joystick for Individuals with Dystonia and Chorea
Sara Sibenaller1,3, Dan Ding, PhD.1,3, Brad Dicianno, M.D.2,3, Rory A. Cooper, PhD.1,3
1Dept. of Rehab. Science & Technology, University of Pittsburgh, Pittsburgh, PA 15261
2Dept. PM&R, University of Pittsburgh Medical Center, PA 15213
3Human Engineering Research Laboratories, Highland Drive VA Medical Center, Pittsburgh, PA 15260
ABSTRACT
The purpose of this paper is to describe the design of a universal control interface that is customizable for people with Chorea and Dystonia who cannot drive an electric powered wheelchair (EPW). Potential driving ability of EPW users is evaluated based on a series of target acquisition tasks on a computer screen, and customized algorithms are developed that enable EPW users to drive using scanning, direct selection, and/or switch selection with an isometric joystick.
KEYWORDS
Wheelchairs; User-Computer Interface; Chorea; Dystonia; Isometric Joystick
INTRODUCTION
The joystick is a primary means of control for a person with a disability using an electric powered wheelchair (EPW), but current devices do not provide adequate control for people with movement disorders [1]. According to a survey of doctors at rehabilitation hospitals conducted by Fehr et. al., 40 percent of their patients have difficulty steering using non-computer aided driving methods [2]. These driving methods include movement sensing joysticks (MSJs) that cause the wheelchair to increase velocity as the as the joystick is moved from center. This movement requires proprioception, joint mobility, and fine motor control which can be problematic for people with movement disorders [3]. Alternatively, when an individual uses an Isometric Joystick (IJ), the wheelchair increases velocity as force exerted on the fixed joystick increases. IJs require the user to produce only small graded forces rather than complex movements of upper extremity joints. Therefore, IJs theoretically require less fine motor control, but are not yet commercially available [3].
An Isometric Joystick (IJ) has been developed by the Human Engineering Research Laboratories (HERL) [4]. The HERL IJ can be customized and used in variety of applications including power wheelchair driving, environmental control units, computer access, and augmentative and alternative communication aids. Additionally, the IJ is highly programmable and can filter out unintentional movements present in people with movement disorders and can potentially be used as a switch for people with limited motor function if specialized algorithms are applied.
People with movement disorders including Chorea and Dystonia, neurological disorders sometimes associated with stroke or cerebral palsy, might benefit from an alternative switch control [(5), (6)]. When a person has limited fine motor control from such disorders, he or she may have difficulty using a conventional joystick or switches due to an inability to produce continuous force and directional movements needed to control them. Customization of control interfaces for individual users could produce more promising results. Previous research has shown promising outcomes with customized joysticks and IJs. Riley and Rosen showed that joystick customization to a specific user lead to better performance in computerized tracking tasks [7]. Rao et al. found that people with cerebral palsy performed better on a target acquisition task using an IJ as opposed to a MSJs [6]. Dicianno et al. found that using an IJ programmed with a variable gain algorithm produced wheelchair driving performance that was comparable to using an MSJ [3].
In this paper, we describe the design and development of customized algorithms for the HERL IJ based on the individual motor abilities of people with chorea or dystonia. Future work will include clinical testing on the efficacy and performance of the algorithms.
A software package, consisting of 4 interfaces, was developed for designing customized algorithms for people with Dystonia and Chorea based on their abilities to produce directional and graded forces. The first three interfaces: the joystick tuning interface, target selection interface, and the customizable control interface were designed using Borland C++ Builder 4 [8]. The last interface, the virtual driving interface, was designed in Microsoft Visual Studio using C++ [9].
Joystick Tuning Interface
The joystick tuning interface is used to personalize the dead zone, and axis alignment to the user. The dead zone is the minimum force that needs to be exceeded in order to produce cursor movement. Dead zone shapes can be circular, elliptical, square, or rectangular and people with different physiological conditions will have different dead zone shapes and sizes. Axis alignment is the input direction with respect to the driving direction. The axis alignment can be rotated to the left or the right, but driving directions will remain orthogonal with respect to one another. Some people have better control with a rotated axis [(10), (11)].
Target Selection Interface
After joystick tuning, the target selection interface is used to collect information related to users’ ability to generate directional and graded forces. Subjects are asked to move the cursor as quickly and as accurately as possible from center to the target when it appears on the screen and then hover on the target for two seconds. If the subject can hover on the target for two seconds then the subject successfully completed the task. During the trial, 32 targets appear on the screen in 8 different locations (4 times in each position). Each target location is associated with one graded force and one direction, and appears on the screen for 10 seconds and then disappears. If the participant is able to successfully acquire a target at least 75% of the time, he/she is considered to be able to produce the direction/force combination and the information will be utilized in the customized algorithm.
Customizable Control Interface
Based on the combination of directional and graded forces produced by the subject, customized algorithms are developed utilizing scanning and/or switch technology. Participant’s functional abilities are expected to range from very low to high functioning. Therefore, customized algorithms will range from most basic single switch scanning and selection to more complex direct selection. For example, if a participant can only exert one force in one direction, single switch scanning will be used. He/she can select a movement direction (forward, backward, left, and right) from a scanning menu by applying a force on the joystick when the appropriate direction is highlighted on the menu (see Figure 1). The cursor will then begin to move in the selected direction and scanning will be paused. The participant needs to apply another force to stop the cursor and scanning will continue. If the participant has the ability to produce two graded or directional forces, he/she can use one graded or directional force to scan through the menu options and the other graded or directional force to select the movement option. After the customized scanning/switching algorithm is designed for the individual, the target selection interface is used to evaluate the algorithm and facilitate practice.
Virtual Driving Interface
Lastly, the subject’s abilities are tested using a previously developed virtual driving interface [12]. The subject is tested twice, five trials with and five trials without the customized algorithm, in a randomized order. When using the customized algorithm, the direction menu appears on the bottom right corner of the screen (see Figure 2).
RESULTS
Target Selection Interface
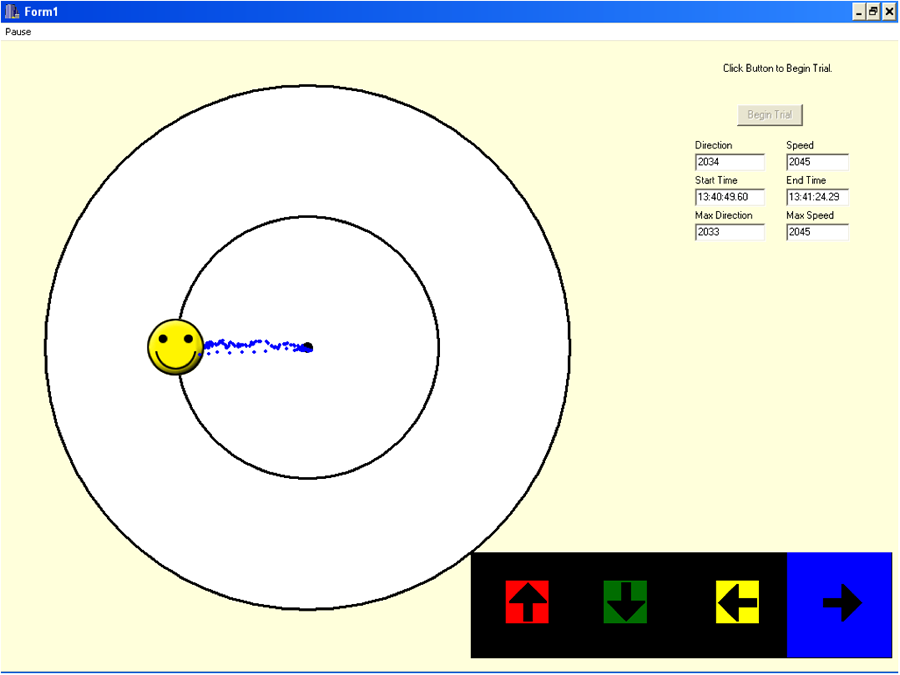 Figure 1: Target Selection Interface (Click for larger view)
Figure 1: Target Selection Interface (Click for larger view) Figure 1 shows the target selection task interface consisting of two concentric circles, one double the diameter of the other. The cursor, initially located at the center of the screen, corresponds to zero force being applied to the joystick. Images appear on the screen in one location at a time in a random order.
Fitt’s law is used to compare target selection performance using customized and non-customized algorithms. Fitt’s law predicts the time required to move from a starting position to a final target using inputs of distance to the target, target size, actual movement distance, and movement time [13].
Virtual Driving Interface
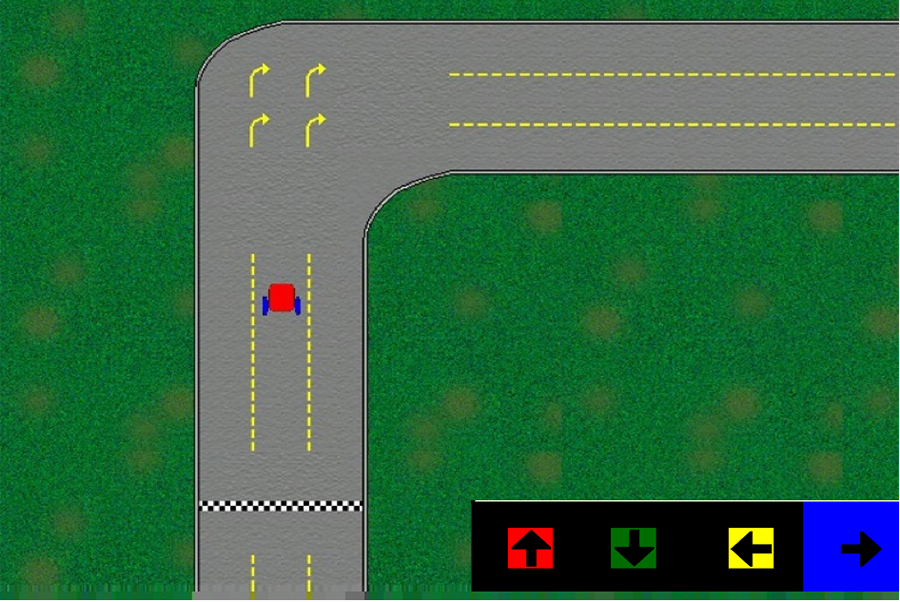 Figure 2: Virtual Driving Interface (Click for larger view) (Click for larger view)
Figure 2: Virtual Driving Interface (Click for larger view) (Click for larger view) Figure 2 shows the virtual driving interface which includes random 90 degree turns [12]. The direction menu, seen at the bottom right of figure 2, is only present when the customized algorithm is being used. The average number of boundary violations, average deviation from the driving path, number of trials completed successfully, and average trial time are used to compare driving with and without customized algorithms.
DISCUSSION
People with movement disorders sometimes have difficulty or are unable to use a conventional joystick. Customization of control interfaces for the individual user could potentially enable people who could not use a traditional MSJ to become more independent by using customized algorithms. Although this study focuses on people with Dystonia and Chorea, people with Cerebral Palsy might also be able to benefit from this technology. Future work will involve clinical testing to determine the effectiveness of customized algorithms that utilize switch and scanning technology for people with movement disorders.
REFERENCES
- Cooper, R.A., et al., Force Sensing Control for Electric Powered Wheelchairs. IEEE Transations on Control Systems Technology, 2000. 8(1): p. 112-117.
- Fehr, L., W.E. Langbein, and S.B. Skaar, Adequacy of power wheelchair control interfaces for persons with severe disabilities: a clinical survey. J Rehabil Res Dev, 2000. 37(3): p. 353-60.
- Dicianno, B.E., et al., Advancements in power wheelchair joystick technology: Effects of isometric joysticks and signal conditioning on driving performance. Am J Phys Med Rehabil, 2006. 85(8): p. 631-9.
- Spaeth, D.M., Evaluation of an isometric joystick with control enhancing algorithms for improved driving of electric powered wheelchairs. 2002. p. xv, 203 leaves.
- Alarcon, F., et al., Post-stroke movement disorders: report of 56 patients. Journal of Neurology, Neurosurgery & Psychiatry, 2004. 75(11): p. 1568-74.
- Rao, R.S., R. Seliktar, and T. Rahman, Evaluation of an isometric and a position joystick in a target acquisition task for individuals with cerebral palsy. IEEE Trans Rehabil Eng, 2000. 8(1): p. 118-25.
- Riley, P. and M. Rosen, Evaluating manual control devices for those with tremor disability Journal of Rehabilitation Research and Development, 1987. 24: p. 99-110.
- Inprise, Borland C++ Builder. 2000, Inprise Corporation Scotts Valley, CA 95066.
- Microsoft, Microsoft Visual C++.net. 1998-2002.
- Ding, D., R.A. Cooper, and D.M. Spaeth, Isometric Joystick tuning interface and assessment. , in Proceedings of RESNA Annual Conference. 2004, in press ??? : Orlando, FL.
- Cooper, R., D. Spaeth, and S. Guo, Variable compliance joystick with compensation algorithms U.P.a.T. Office, Editor. 2005: United States.
- Cooper, R.A., et al., Comparison of virtual and real electric powered wheelchair driving using a position sensing joystick and an isometric joystick. Med Eng Phys, 2002. 24(10): p. 703-8.
- Fitts, P.M., The information capacity of the human motor system in controlling the amplitude of movement. Journal of Experimental Psychology, 1954. 47(6): p. 381-391.
ACKNOWLEDGEMENTS
This research was supported by the Human Engineering Research Laboratories Veteran’s Health Administration VISN Pilot Funds Grant, CPPF: H0004.
Highlights
- Source Ordered
- No Tables
- Very Compatible
Gargoyles
Disney produced a television show in the mid 1990s called Gargoyles. It's a great show and I'm a big fan. A few years ago Disney started to release the show on DVD. The last release was of season 2, volume 1. That was two years ago. Volume 2 has not been released. Why? Poor sales. So if you should find yourself wanting to support my work, instead I ask you pick up a copy of season 2, volume 1. It's a great show and you might find yourself enjoying it.