ABSTRACT
Descending ramps and sloped sidewalks may present a significant barrier to independent and safe mobility for manual wheelchair users. The most common technique to retard speed is the use of friction on the wheels, either at the tires or push rims. For persons with poor hand strength and/or sensation, this braking action can be difficult or impossible. The inability to control chair speed places the occupant at risk of collisions, falls and/or tips. The majority of tips and falls occur in the forward direction, consistent with running into an object at too high of speed. A need exists for a braking system for manual wheelchair users who do not have full upper extremity function. Through a user-centered design approach, a “hand-on” brake has been developed allowing users to maintain control of their wheelchair, while maintaining direct contact with the push rims.
KEYWORDS:
mobility; wheelchair; independent; braking; outdoors
BACKGROUND
Braking for users of manual wheelchairs can be a challenging task, especially for those with limited mobility/dexterity or while traveling downhill. Primarily a wheelchair user will apply friction to the push-rim and/or wheel with either a bare or gloved hand—bare hands can be burned from high friction rims during braking, while gloves can reduce sensation for propulsion (1). Some users will lean forward to engage the wheel locks against the tire to slow down. This method is undesirable for several reasons. First, it is an incorrect use of a device, akin to slowing a car by using a parking brake. Second, it puts the user’s center of gravity far forward in the base of support provided by the wheelchair, potentially causing the user to fall out of the chair. There are several devices currently available that allow the user to apply braking forces through external mechanical measures, but the majority of these devices require the user to remove their hands from the push-rim to engage the system.
DESIGN QUESTIONS
Several questions popped up during the design process that added clarity, epiphany, and direction to the project. What are the larger issues regarding a lack of brakes for manual wheelchairs? Listening to users describe their experiences narrowly avoiding catastrophe adds a persona to the challenge What are the fundamental problems associated by not having a dynamic braking system? Who would benefit from such a system? Is the perceived benefit greater than the effort required to use it?
CURRENT STATE OF THE ART
Several searches were performed through multiple avenues to understand what has been attempted previously and what is currently available to market. Many patented devices claim the title of brakes, however their action is more lock than brake, similar to an automobile parking brake. Most are intended to provide a stationary engagement once the wheelchair has stopped and to prevent movement. Many devices are either some form of caliper to grasp the rim of the wheel, or a friction assembly contacting the tire surface (2-8). Of the few devices applying deceleration forces, and not a locking mechanism, most require the user to remove their hands from the push-rim for activation. Very few devices provide for a “hands-on” activation mechanism.
UNDERSTANDING THE USER
A 15 question survey was sent to almost 400 individuals in North America and Australia who self-identified as having a mobility impairment. The survey targeted manual wheelchair users and received 86 responses. The questions were divided into three categories: wheelchair setup, functional abilities and propulsion ability, and perception of need for a braking system. The responses were used to validate the need for a brake and to establish an understanding of potential users. Seventy-two percent of the respondents propel outdoors without aid either all or more than half of the time. Over 3⁄4 of the respondents have felt a loss of control of their wheelchairs either during or after going down a slope or ramp. Over 90% of the respondents feel that a need exists for an improved braking system for manual wheelchairs and 81% said that they would use such a device. Cross tabulation of the of the responses indicated that 54% of those that propel independently outdoors have experienced a loss of control, and 66% of those same responses feel there is a need for an improved system.
ESTABLISHING DESIGN CRITERIA
After interpreting the results from the survey and consulting with both users and clinicians, two categories of specifications were developed: user function attributes and device physical attributes. These will be reviewed upon completion of the project to validate the design. The design specifications are very straight forward, such as: activated while the hand is still on the push rim; usable by both high and low grip strength and dexterity; maintaining quick release functionality; not increasing the width or weight of the wheelchair; not impacting normal operation and propulsion of the wheel; and providing consistent and repeatable operation.
DEVICE DESIGN

Figure 1: Wheelchair (Click for larger view)
Assistive technology design methodology is a multistep approach that generally involves problem definition; identification of design specifications; compilation of design solutions; iterations of prototype fabrication and testing; and finally, design of the production version of the device (9). This methodology involves input from many sources, including design, engineering, market analysis, and end user input. This project has gone a step further involving multiple stakeholders, including wheelchair users, rehab clinicians, suppliers and technicians.
The prototype system uses a quick release wheel with brake pads inside the hub, and interfaces to a braking surface attached to the axle block of the wheelchair. The wheels are machined from billet aluminum and pressed into hollowed-out “mag” wheels. Mag wheels were used for their simplicity in prototyping versus spoke wheels. The drum brake mechanism inside the wheel is activated by a “floating” push rim, which is mounted to a rotating bearing surface at the hub, with a return spring attached to the perimeter of the tire. The braking surface attaches to the axle block of the wheelchair maintaining stock camber and width.
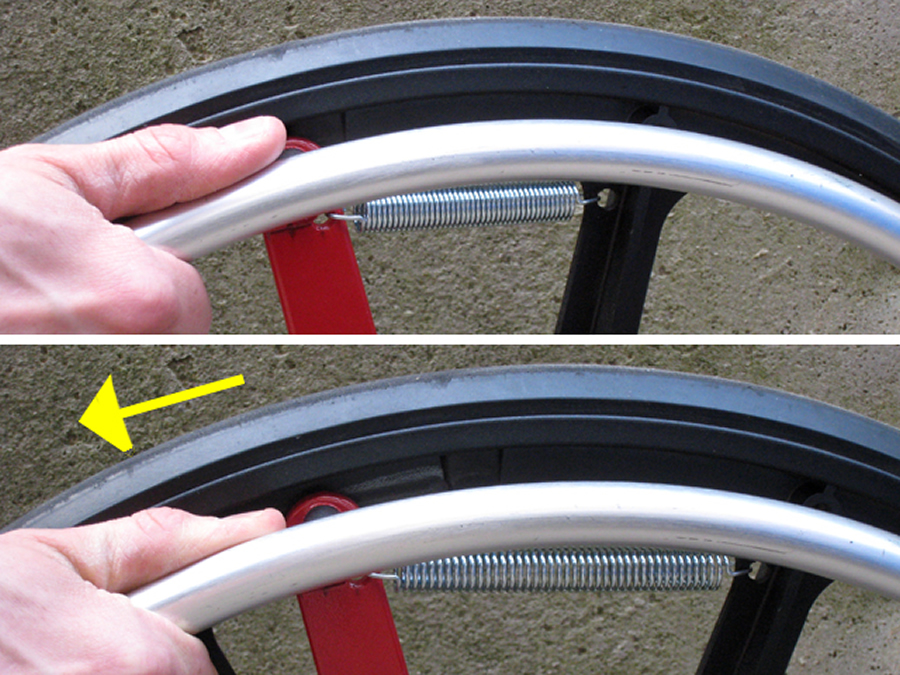
Figure 2: Wheel Close-up (Click for larger view)
The push rim has a positive stop against the wheel, and propels forward normally without any notice that it is not actually attached to the wheel itself. It is not until slowing down that the push rim articulates, with the brakes engaging simply by applying friction to the push rim, just one would normally slow down. It is similar in concept to applying backwards pressure on the pedals of a beach cruiser bicycle. The torque applied to the push rim due to the forward momentum of the chair, overcomes the force of the return springs, and the push rim articulates backwards. There is less than 3cm of articulation, engaging the brake pads against the braking surface, slowing down the wheelchair. This movement is virtually undetectable until the user comes to a complete stop and releases the push rim. At this point it returns back to its naturally open state and releases the brake pads. Reversing in the wheelchair is normal as well, with the torque applied to the push rim being less than the force of the return spring.
EVALUATING THE DESIGN
Eight individuals tested the final prototypes: two wheelers with quadriplegia, two wheelers with paraplegia, one wheeler with cerebral palsy who also uses a power chair, and three able-bodied clinicians. The users were asked perform a series of deceleration maneuvers on a sloped surface: short, quick stops; long, controlled braking; and zigzags. Several users voluntarily popped and maintained wheelies on steeper descents. Before testing the braking system, the users were briefed on the nature of the project, the mechanism itself, and the design intent. They were asked their opinions of the project, whom they thought would benefit from such a device, and if the perceived benefit of using a device is greater the effort required using it (i.e. acceptance of the device).
RESULTS
All users experienced very positive results during the tests, being able to quickly and easily maintain speed, slow down, and stop. They all believed that every manual wheelchair user who propels outdoors would benefit from this braking system, whether wheeling across a college campus, rolling through a parking deck to work, or walking the dog on the weekend. Prototype refinement and testing will continue to make this a more viable product for market.
CONCLUSION
By examining the available product market, and watching wheelers in action, it becomes obvious that an additional braking system needs to be incorporated into existing manual wheelchairs, that allows users to maintain their hands on the wheel. It is suggested that an improved braking system would benefit all manual wheelchair users in many different challenging environments, from those with low-dexterity, to those with high-function
REFERENCES
- Woude, L. H. V. v. d., & Commission of the European Communities. (1993). Ergonomics of manual wheelchair propulsion : state of the art. Milano Amsterdam ; Washington, D.C.: Pro Juventite ; IOS Press.
- US Patent 4,537,415 - Delahoussaye, et al., 08/27/1985 - Dynamic brake for manual wheelchair.
- US Patent 4,204,588 - Kawecki, 05/27/1980 - Wheelchair braking apparatus.
- US Patent 7,252,300 - Hargroder, 08/07/2007 - Manual brake for a wheelchair with a variable braking force.
- US Patent 5,657,836 – BeVier, 08/19/1997 - Coaster hub with brake.
- US Patent 6,851,522 – Wren, 02/08/2005 - Wheelchair brake attachment apparatus.
- US Patent 5,492,355 – Berry, 02/20/1996 - Wheelchair brake.
- US Patent 4,987,978 – Jungersen, 01/29/1991 - Wheelchair safety brakes.
- Gray, D. B., Quatrano, L. A., & Lieberman, M. L. (1998). Designing and using assistive technology : the human perspective. Baltimore: Paul H. Brookes.
PRIMARY AUTHOR CONTACT:
Jonathan E. Jowers
490 10th Street
Atlanta, GA 30318