Kim Adams1,2, Bonnie-Lynn David2
1University of Alberta and 2Glenrose Rehabilitation Hospital, Edmonton, Canadaabstract
Three children who have cerebral palsy used three methods to do the manipulation tasks in some math measurement activities: controlling a Lego robot through their speech generating device, answering teacher-guided questions, and telling the teacher what to do. Three elementary school teachers evaluated video clips of the participants doing measurement and rated if the participant was able to portray his/her level of understanding about the concept using the different modes. The robot was the most effective mode. The Teacher- Guided mode had the issue of "who did what?" Directing Teacher was effective, but the participant needed high linguistic skill.
Introduction
Typically, learning of early math concepts is through performing hands-on activities and discussing findings (Ginsburg, Klein et al. 1998). However, children with physical and communication impairments may experience delays in their math skills (for example, children with cerebral palsy in Arp and Fagard 2005; Jenks, de Moor et al. 2007). The delays could stem from environmental factors such as limited time spent learning math (Light and Lindsay 1991; Eriksson, Welander et al. 2007) or inability to physically access the manipulative objects used in hands-on activities (Jenks, de Moor et al. 2007). Physically manipulating objects is an important step in attaining early math concepts, for instance, pointing at objects while counting them (Ginsburg, Klein et al. 1998; Bisanz, Sherman et al. 2005). Children who have physical limitations may find it difficult to engage in these sorts of activities due to limits in grasping and moving manipulative objects with the appropriate resolution (Eliasson, Krumlinde et al. 2006).
In addition to being able to manipulate, being able to communicate while performing math is important so children can "verbalize to internalize" (Bley and Thornton 1994, p 145), ask for help, or talk aloud so teachers can ascertain their level of understanding (Ginsburg, Klein et al. 1998). Children who use augmentative communication methods to address their communication needs may find it difficult to discuss concepts due to slowness of communication rate, limited vocabulary options, and limits in experience using and hearing concepts. Teacher's knowledge of strategies for inclusion has also been identified as a limitation. In one study where investigators trained teachers strategies for inclusion, a boy directed classmates to choose objects to measure and he reported on the results (Schlosser, McGhie-Richmond et al. 2000). However, he did not manipulate the items himself.
The benefits of using robots for manipulation of math objects, controlled from augmentative communication devices, has been examined (Adams 2011). In a series of three case studies, children with severe physical and communication limitations used their own speech generating communication device (SGD) to control a LegoTM robot. They performed grade 1 math activities involving comparing, sorting, and ordering objects, and grade 2 activities involving measuring objects with non-standard units of length (e.g., straws or toothpicks) and then comparing and ordering the objects based on the measurement. Students had the opportunity to manipulate items using different modes: 1) using the robot, 2) answering teacher-guided questions such as "does it go here?" while the teacher manipulated the items, and 3) one participant directed the teacher by using his SGD.
Members of the participant's assistive technology team were interviewed regarding the effectiveness of using each manipulation mode. Their collective opinion was that using the robot was a more effective way to "show what students know" than guiding the teacher since it took the issue of who is doing what (the participant or the teacher) out of the question. They felt that when the participant directed the teacher to manipulate using his SGD, it was effective, but time consuming, and linguistically demanding on the student. They also commented that though observing the teacher was most efficient and has its place in the classroom, the benefits of using the robot in terms of effectiveness as a learning tool and participant satisfaction (highest with the robot) were important.
The case studies are suggestive that students could better demonstrate understanding of math concepts using a robot, but a limitation in the studies was that the use of different modes for manipulation was not used consistently across all participants and activities. Another limitation was that the evaluation team was very familiar with the participant and assistive technology strategies, which is not always the case in a typical integrated classroom.
The following research question was examined in this study: When participants use three modes of manipulation (controlling a Lego robot, answering teacher-guided questions, and directing the teacher) to do math measuring tasks, do teachers perceive a difference between modes in effectiveness in "showing what the student knows"?
Methods
Participants
The same participants as in the case studies participated in this study: a 12 year old girl, 10 year old boy and a 14 year old girl (called M01, M02 and M03 here). All had spastic athetoid quadriparetic cerebral palsy. All used VanguardTM II SGDs, where M01 and M02 used the Unity™ 45 Full language system and M03 used Unity 84 Sequenced. They all activated their SGDs using two switches in step scanning, with SpecTM switches mounted to their wheelchair head-rests. M02 and M03 were independent communicators with about 5 years of prior experience with SGDs. M01 was a context-dependent communicator who had her SGD for 2 years prior to the study.
Three teachers participated in evaluation of system effectiveness. They were elementary school teachers from the community who had not previously been exposed to the robot study or specific training in special education or assistive technology.
Materials
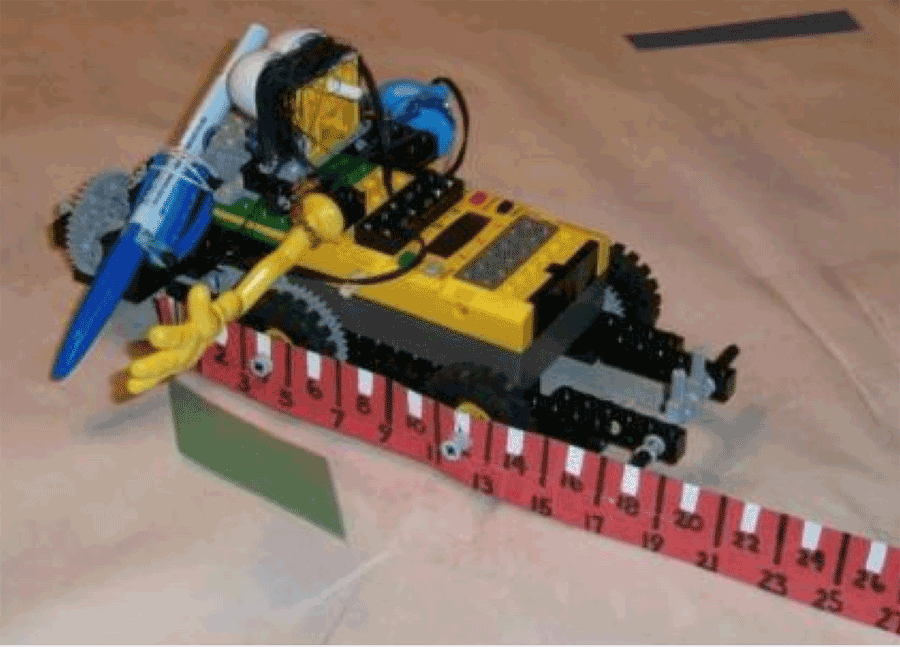 Figure 1: Lego robot with ruler and pen attached.
Figure 1: Lego robot with ruler and pen attached.
A Lego Mindstorms RCX car-like robot was adapted to be able to accomplish two hands-on measurement tasks (Figure 1). A 30 centimetre ruler was attached to the side of the robot, and participants could control the robot in the forward, backward, left and right directions (including small movements) for measuring length of objects. A pen was added so that participants could move it up and down to draw lines of different lengths.
The infrared (IR) output of the SGD was used to control the robot. The participants used the same SGD robot command interfaces as in the case studies.
Protocol
Each participant was seen for two 60 minute sessions. The first session was to re-familiarize with robot control using a training protocol from the case studies. The second session was to perform the math measurement tasks. The math sessions were taught by the same special education teacher as in the case studies and followed lesson plans based on the Math Makes Sense level 3, Lesson 4 resource (Pearson Education Canada 2009). The lesson questions, topic and order were as follows:
- Question 4 a, b and c: Draw a line to show how long or how high and then measure it (e.g., "A grasshopper can jump 11 cm high.")
- Question 3 a, b, and c: Measure the length of each shape (e.g., a parallelogram, Figure 1)
The participant used one manipulation mode for each question a, b, and c (controlling the Lego robot, answering teacher-guided questions, and directing the teacher), with the order randomly chosen. Video clips of each participant doing each question using each of the three modes were created.
The evaluators were given a package including the video clips, a description of the participants and how they communicate, a transcript of the words spoken with the SGD, and copies of the original lesson plans. They watched each video clip and rated their agreement with the statement "The participant is able to portray his/her level of understanding about the concept being discussed" on a Likert scale from 1 to 5 (Strongly Disagree, Disagree, Neutral, Agree, Strongly Agree). They were asked to comment on each video clip, and to make any overall comments.
results
Participants had varying success with the Directing Teacher mode. M02, who had the most advanced linguistic abilities, was quite articulate in expressing his instructions. For example, to ask the teacher to draw a line he said the following: “pick up the pencil and ruler”, “ruler put on the table”, “draw a line from 0 to 11”. To measure the objects, M03 said, “ruler beside the rectangle” and “move to 0”. However, M01, who had the least linguistic skill, became so frustrated with Directing Teacher (even with heavy teacher prompting) that she requested to stop the activity.
The teacher's ratings are shown in Table 1.
Mode |
Question 4 |
Question 3 |
||||
|---|---|---|---|---|---|---|
M01 |
M02 |
M03 |
M01 |
M02 |
M03 |
|
Directing Teacher |
1(1) |
5(0) |
4(1) |
4(2) |
5(0) |
4(1) |
Teacher Guided |
3(2) |
4(1) |
4(0) |
5(1) |
4(1) |
4(1) |
Robot |
3(3) |
5(0) |
5(0) |
4(2) |
5(1) |
4(1) |
Qualitative analysis of the teacher's comments is in progress. Overall comments were as follows:
- Teacher 1 said "I feel the robot is a valuable tool where it is easier to see if the participant knows what to do. While at times it takes longer, I feel that there is less 'leading' as it is up to the participant to show what he/she knows and can do."
- Teacher 2 said, "I think the children were more accurate when using the robot. The students seemed much happier using the robot as well."
Teacher 3 did not make overall comments, but representative quotes from her comments regarding the video clips will be used in the discussion.
Discussion
From the median rating results, it appears that teachers did perceive a difference in effectiveness in "showing what they know" between the different modes of manipulation to do math measuring tasks. The Robot condition received the highest median rating once and shared it three times, whereas Directing Teacher shared the highest rating twice, and Teacher-Guided received the highest median rating only once and shared it once. Hence, the robot received or shared the highest rating in 66% of the questions, and the other modes received or shared the highest rating in 33% of the questions.
The overall comments of Teachers 1 and 2 corroborate that they felt that using the robot was the most effective method. Teacher 3's video clip comments indicated similar findings, for example, for the Robot condition for M01, she said, "The participant seems more able (or willing) to demonstrate understanding when she is in control".
The issue of who is doing what in the Teacher-Guided mode was commented on by the teachers. Teacher 1 specifically mentioned that there was less 'leading' of the participant with the robot. Teacher 3 said that M01 had "little ownership in actually completing the skill" and that there were "lots of leading questions" from the teacher with M03.
Linguistic ability appears to be a contributing factor in whether a manipulation mode facilitates a participant's ability to portray his/her understanding of a concept. M02, who had the most advanced linguistic skills, was able to portray what he knew equally well in the Directing Teacher and Robot conditions. However, M01, who had the least linguistic skill, received a Strongly Disagree that she could portray what she understood while Directing the Teacher in Question 4. In Question 3, the teachers noticed that the Directing Teacher condition was basically the same as Teacher Guided. Hence, it could be that the teacher began compensating for the participant's linguistic limitations. This could explain why Directing the Teacher is not rated as low for M01 in Question 3.
A limitation in the study is the range in teacher's Likert ratings for M01 - the range was more than one on both robot conditions, and one of each of the other conditions. From the comments made for each video clip, it appears that teachers were sometimes rating the level of understanding rather than the ability to portray his/her level of understanding. For example, one teacher stated, "Didn't quite report the correct measurement first, then corrected." In addition, M01's low math and linguistic skills might have made it difficult for the teachers to rate her.
In conclusion, this study provides support to the assertion from the case studies that students who have severe disabilities can demonstrate understanding of math concepts using a robot. Like the Evaluation Team in the case studies, the teachers in this study agreed that the Robot was the most effective of the three modes for the participant to "show what they know". Like in the case study, the teachers in this study also noticed that in the Teacher- Guided mode the issue of who did what was a problem (e.g., the teacher "leading" the participant). Finally, the teachers in this study rated Directing Teacher as effective to portray understanding, but only for the participants who had good linguistic skill. In M01's case, the linguistic demands were too high, for her to use this mode effectively. Efficiency (in terms of time) of each mode and participant satisfaction were measured, but not reported here. These are important factors in considering the use of robots to accomplish activities.
References
Pearson Education Canada (2009). Math Makes Sense 3. Toronto, Ontario Pearson Education Canada.
Acknowledgements
We would like to acknowledge the Faculty of Rehabilitation Medicine for financial support for this study and Adriana Rios for her assistance on this project.