Dan Ding, PhD; Joshua Telson, MS; Kavita Krishnaswamy, BS; Hyun Ka PhD; Rory Cooper, PhD
Human Engineering Research Laboratories, Department of Veterans Affairs, Pittsburgh, PA;
Department of Rehabilitation Science and Technology, University of Pittsburgh, Pittsburgh, PA;
Department of Computer Science and Electrical Engineering, University of Maryland, Baltimore County, MD
ABSTRACT
We developed and evaluated an assistive robotic manipulator called KitchenBot that operates along an overhead track built into the kitchen to assist individuals with upper extremity impairments for common kitchen tasks. Focus groups conducted with eleven participants from the potential user population revealed that potential users had very positive perceptions, opinions, and attitudes toward an overhead kitchen robot appliance. Most of participants felt that Kitchen was not only easy to use, but it was also able to allow them to complete tasks they currently could not do independently.
INTRODUCTION
A kitchen is often referred to as the “heart of the house.” However, many individuals with manipulation, mobility, reach, and/or strength deficiencies have found it difficult or impossible to efficiently and consistently complete common kitchen tasks such as meal preparation and cleanup. Assistive robotic manipulators have been recognized as a potential solution to mitigate the difficulties, frustration, and loss of independence experienced by these individuals (Allin, Eckel, Markham, & Brewer, 2010; Romer, Stuyt, & Peters, 2005). In addition, a survey of 42 individuals with limited or no upper extremity ability revealed the kitchen was considered the best site for accommodating an assistive robotic device (Stanger, Anglin, Harwin, & Romilly, 1994).
Currently, there are several mobile-based manipulation systems that could potentially help individuals with limited or no upper extremity ability with kitchen tasks. Rusu and colleagues (Rusu, Gerkey, & Beetz, 2008) published a technical paper that described the development of a mobile-based dual arm service robot that learns from sensors equipped kitchen. Stoian, Nitulescu, and Pana presented several ideas about using the robotic arms and mobile robots as an assistive technology in a smart house for people with disabilities (Stoian, Nitulescu, & Pana, 2009). Home Exploring Robotic Butler (HERB) developed at Carnegie Mellon University is another duel-arm mobile robot that has demonstrated the ability to perform kitchen tasks such as carrying pitchers, getting a pack of chips, sorting dishes, and fetching drinks. However, most of the relevant work so far has been on technology development or conceptual design without end-user involvement. Personal Mobility and Manipulation Appliance (PerMMA) is a wheelchair-mounted dual robotic arms on a curved track and was evaluated by 15 users with both lower and upper extremity impairments. None of the participants were able to complete all five tasks within a single session, but participants rated that PerMMA could potentially help them achieve important goals at 7.2±3.0 in a 10-point scale (Wang et al., 2013). Dusty is an assistive mobile manipulator designed to help individuals with motor impairments to retrieve dropped objects. It was evaluated by 20 people with amyotrophic lateral sclerosis and participants rated Dusty to be significantly easier to use than their own hands, asking family members, or using mechanical reachers.
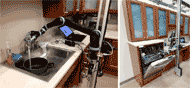 Figure 1. KitchenBot - Working Prototype
Figure 1. KitchenBot - Working PrototypeIn this study, we use a participatory action design approach to develop a fixed environment mount assistive robotic system, called KitchenBot, which operates along an overhead track built into the kitchen to assist individuals with upper extremity impairments with common kitchen tasks. A fixed mount option presents minimal physical barriers to user movement and makes it simpler to control and monitor the robotic manipulator for manual and autonomous tasks. Also it could potentially benefit those with upper limb impairments who do not use an electric powered wheelchair and enable the handling of big or heavy objects. In our RESNA paper last year, we reported the preliminary conceptual design of the KitchenBot based on multiple focus groups with 26 wheelchair users (Telson, Ding, McCartney, & Cooper, 2013). We have since developed a working prototype of the KitchenBot (Figure 1). In this paper, we will present the focus group evaluation of the working protocol. We expect to use the feedback from the focus groups to refine the KitchenBot prototype and develop several control interfaces for another round of user evaluation.
METHODS
KitchenBot Prototype
The working prototype includes an overhead track and a robotic manipulator JACO (Kinova, Montreal, Canada) installed in the research kitchen at the Human Engineering Research Laboratories in Pittsburgh, PA. The track consisted of four components: a curved horizontal s-curve track that surrounds the overhead cabinets, a vertical column that drives the manipulator up and down, a horizontal carriage that drives the column left or right, and a bottom carriage that maintains stability. The prototype allowed for input from a column-mounted joystick for manual control or from a computer’s serial interface to autonomously move the manipulator to a given X, Y position within 0.1 inches.
Subjects
Subjects were included in the study if they were at least 18 years of age, had a physical disability, and could comprehend English. Subject were recruited through flyers posted in rehab clinics and disability organizations, as well as a research registry. Written consents were obtained before focus groups in accordance with the Institutional Review Board of the VA Pittsburgh Healthcare System. Three focus groups were conducted with 5, 3 and 3 participants, respectively.
Procedures
Participants first completed a questionnaire regarding basic demographic information and their experience with assistive technology. Participant was also asked to respond to a list of kitchen related tasks using a seven-point Likert scale (Vagias, 2006) from “Very Unimportant” to “Very Important” and the frequency they receive assistance with each of those tasks from “Never” to “Every Time”. They then participated in a round-robin group discussion moderated by one of the investigators. During the group discussion, the KitchenBot was demonstrated to autonomously perform common kitchen tasks, such as opening kitchen cabinets, appliances, and the sink faucet. The discussions were centered around the types of interface (joystick, tablet, voice) and control methods (manual vs autonomous), feasibility, and safety. At the end of the discussion, the group was asked to rank the priority for future development. Figure 2 shows the joystick and tablet interfaces. The tablet interfaces allow users to move the KitchenBot to a specific location by tapping the appropriate place in the virtual kitchen interface as well as control the robotic manipulator itself. Each focus group was audio recorded and later transcribed for content analysis. After the focus group discussion, subjects were asked to complete a questionnaire modified based upon the System Usability Scale (SUS) (Sauro, 2011) to evaluate their perceived ease-of-use and usefulness of the KitchenBot.
Data Analysis
Descriptive statistics were used to summarize the data from the questionnaires. Context analysis was performed to extract common discussion themes based on audio transcriptions.
RESULTS
Eleven subjects participated in three focus groups. There were 7 males and 4 females. The average age was 44 ± 21 years. Of those 11 participants, six had spinal cord injury, two cerebral palsy, one Polio, one double amputee, and one orthopedic impairments. There were five manual wheelchair users, five power wheelchair users, and one scooter user. The average number of years with a disability was 24.9 ± 24.4 years. Four participants considered themselves technology savvy and reported that they had built an assistive device to meet their own needs.
Participants reported the following kitchen tasks were important to them: opening/closing/reaching into a cabinet above the countertop (91%), moving hot objects from the stove and oven (91%), moving hot objects from the microwave (91%), and putting in/taking out heavy objects (91%). In addition, participants also reported the following kitchen tasks required at least frequent assistance: stabilizing pots on the stove (55%), opening/closing/reaching a cabinet above the countertop (55%), moving hot objects from the stove (64%), moving hot objects from the oven (64%), putting in/taking out heavy objects (64%), and carrying heavy objects (64%).
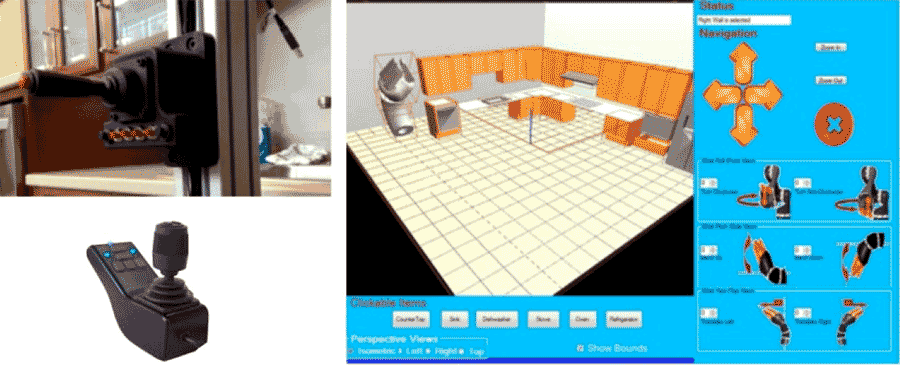 Figure 2. Joystick and Tablet Interfaces
Figure 2. Joystick and Tablet InterfacesAs for perceived ease-of-use, the percentages of participants who agree (including somewhat agree, agree, and strongly agree) with the statements related to ease-of-use are as follows: it would be easy to remember how to operate the KitchenBot (91%); interacting with KitchenBot would be understandable (73%); learning to operate KitchenBot would be easy for me (73%); it would be easy to get KitchenBot to do what I want it to do (64%); and overall KitchenBot would be easy to use (64%). Regarding the perceived usefulness, the percentages of participants who agree (including somewhat agree, agree, and strongly agree) with the statements are as follows: using KitchenBot would allow me to complete kitchen tasks that I cannot do independently (82%); using KitchenBot would make my life easier (73%); using KitchenBot would enhance my effectiveness with kitchen tasks (55%); and overall KitchenBot would be useful in my daily routine (73%).
Regarding the control method, all participants expressed interest in KitchenBot’s ability to perform tasks semi-autonomously or autonomously, and consider the autonomous feature would significant increase their efficiency in the kitchen. One participant also pointed out that there are many routine kitchen tasks that could be potentially automated with KitchenBot.
Regarding the KitchenBot feasibility, the discussion topic included the level of noise, track installation and footprint, adapted kitchen equipment and organization, and possibility of dual arms. All participants expressed that the noise level was tolerable and would not hinder their willingness to use the KitchenBot. Opinions around the track installation and footprint, were mixed. Some had concerns with maneuvering around the KitchenBot because of their small apartment kitchen while others thought it should not be a problem. One participant suggested suspending the vertical column when the KitchenBot is not being used. Participants generally had no issues with using custom cookware or sticking to a particular organizational scheme to accommodate the KitchenBot and make it more effectiveness and easy to control. Participants in general did not favor the dual arm plan and considered the option will significantly increase the cost and complexity to control.
Regarding the KitchenBot safety, the emergency stop button on the joystick and current-limiting function of the manipulator were explained to the group. Participants generally felt the safety mechanism was not adequate with the KitchenBot and suggested to add an emergency button somewhere other than on the column as well as an automatic safety stop.
Finally, all three focus groups independently selected automating tasks as the most important priority for the next stage of development. Adding more safety feature was chosen as the second most important priority. Group 1 and 3 prioritized customizing the track and footprint to fit smaller sized kitchens as the third most important development priority, while group 2 considered working on item organization and adapted kitchen equipment as the third most important development priority.
DISCUSSION
Focus group evaluations of the first working prototype of KitchenBot revealed that potential users have very positive perceptions towards such an overhead robot appliance in the kitchen. Most of participants felt that KitchenBot would be not only easy to use, but also enable them to complete tasks they currently could not do independently.
Future plans were developed based on the focus group feedback and suggestions. Task automation can be improved by storing simplified sub-routines programmed into a KitchenBot database. This database will allow a user or the system itself to perform numerous kitchen tasks, such as retrieval of objects, opening doors, drawers, or appliances, and pushing appliance buttons. The sub-routines in the database can also be assembled to enable more complicated autonomous tasks such as making a cup of coffee or a simple meal. Additional safety features will be implemented including an external emergency stop switch, adding sensors for detecting objects in the horizontal and vertical path of travel around KitchenBot, and a safe-zone settings which limit the KitchenBot from entering an area that may cause damage to the users or the environment. After implementing the task automation and safety features, another user study will be conducted where potential users will be able to interact with the KitchenBot and complete some kitchen tasks.
In the long run, a robotic manipulator with greater payloads would be needed to replace the JACO robotic arm and enhance the ability of the KitchenBot to handle heavy objects in the kitchen.Acknowledgements
This work is supported by National Science Foundation Quality of Life Technology Engineering Research Center (NSF QoLT ERC) #0540865) and with resources and use of facilities at the Human Engineering Research Laboratories (HERL), VA Pittsburgh Healthcare System. This material does not represent the views of the Department of Veterans Affairs or the United States Government.
Audio Version PDF Version