François Routhier1, Philippe Archambault2, Marie-Claude Cyr1,
Véronique Maheu3, Martin Lemay4, Isabelle Gélinas2
1Center for interdisciplinary research in rehabilitation and social integration, Institut de réadaptation en déficience physique de Québec, Québec, Canada; 2Center for interdisciplinary research in rehabilitation of Greater Montreal, Montreal, Canada; 3Kinova, Montréal, Canada; 4Rehabilitation Center Marie Enfant, CHU Sainte-Justine's Research Centre, Montréal, Canada.
Abstract
The JACO robotic arm aims to overcome several problems encountered by existing commercial rehabilitation manipulators that are used as an assistive device by individuals with physical impairments. This project addresses the gap in our understanding of the benefits of robotic arms such as JACO. Objectives are to investigate if JACO can improve independent living and social participation of individuals with upper extremity impairments, and to document the users’ perceived satisfaction and their perceived quality of life (QoL). We also aim to pilot our experimental procedure before conducting a larger clinical trial. This project supports the hypotheses that JACO can improve independence and social participation. JACO is well appreciated by users and it has a positive impact on QoL. To attain valid and generalizable conclusions, additional data need to be collected in home and community settings with a larger sample, stronger research design and better assessment tools.
background
Being able to use one’s arms and hands to perform daily living tasks and achieve life habits is an important determinant of independent living and social participation. It has been shown that individuals with neurological damage show dissatisfaction or limitations in their social participation (Anderson, 2004). This in turn is closely related to the capacity level of manual functions, notably in individuals with spinal cord injuries (Dahlgren, Karlsson, Lundgren-Nilsson, Fridén & Claesson, 2007). Difficulties in manipulating objects during daily living tasks, work, and leisure activities clearly affect the level of pleasure and contentment associated with these activities. To overcome upper limb disabilities, robotic assistive devices have been developed over the past twenty years (eg. Chang & Park 2003; Driessen, Evers & van Woerden, 2001; King, Chen, Fan, Glass & Kemp 2012; Wang, Candiotti, Shino, Chung, Grindle, Ding & Cooper, 2013a).
Only a few robotic arms are commercially available. Most of them have inherent problems limiting their use (e.g. bulky, not unintuitive control, etc.). The JACO robotic arm was developed and commercialized in 2008 by Kinova (www.kinovarehab.ca) with the aim to overcome these problems. This robotic device is indeed promising for individuals with various diagnoses and upper limb impairments. Unfortunately, there is little scientific literature available to support clinicians prescribing a robotic arm. In a recent study, a group of 31 potential users tried the JACO in a variety of tasks, such as pouring a bottle of water into a cup, as well as putting a straw in the cup and drinking (Routhier & Archambault, 2010; Maheu, Frappier, Archambault & Routhier, 2011). The vast majority of users were able to accomplish these tasks on their first attempt, and about two thirds of the participants rated the JACO as easy to use and potentially beneficial to assist them in their daily lives (Routhier & Archambault, 2010; Maheu et al., 2011). It was also shown that JACO represents an efficacious and potentially cost savings alternative for powered wheelchair users with upper limb impairments that are searching for an assistive device that is easy to use and safe (Maheu et al., 2011). In another recent study, the Personal Mobility and Manipulation Appliance (PerMMA) – another robotic arm that improves assistance in both mobility and manipulation – was found to be easy to use in daily activities (Wang, Xu, Grindle, Vazquez, Salatin, Kelleher, Ding, Collins & Cooper, 2013b). This quick overview of the recent scientific literature shows that research is still lacking on the potential benefits of robotic arms in improving independent living and social participation, notably because of the relatively short duration of the previous studies on robotic arms. Because changes in independent living and social participation often occur over time, it is essential to study the benefits of robotic assistive arms such as JACO over a period of several weeks at least, so that the participants can familiarize themselves with the device, learn to use it, and adopt it.
objectiveS
To address the gap in our understanding of the benefits of robotic arms, the first objective of this project is to investigate if JACO can improve independent living and social participation of individuals with upper extremity impairments. The second objective is to document the users’ perceived satisfaction of JACO and their perceived quality of life (QoL) when they use it. Finally, as secondary objective, we aim to pilot test our experimental procedure before conducting a larger trial
DESCRIPTION OF THE ROBOTIC ARM
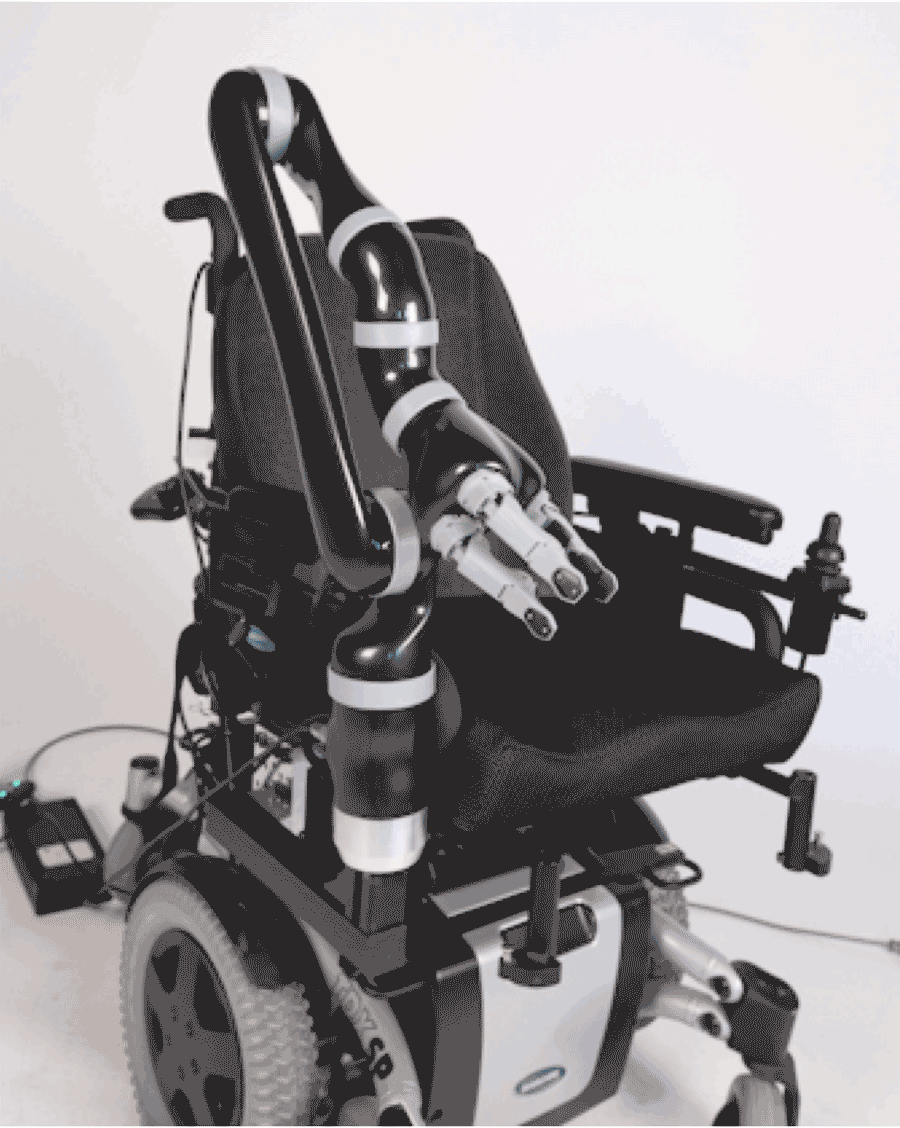 The JACO robotic arm.
The JACO robotic arm. The JACO manipulator is a 3kg wheelchair-mounted robotic device that was designed to compensate for upper limb impairments. JACO is generally installed on a wheelchair in a non-obtrusive, non-invasive way, without extending its width significantly. It is composed of six inter-linked segments, the last of which is a three-fingered hand (see Figure 1). Through the joystick controller, the user can move the robot’s hand in three-dimensional space, while the robot maintains the orientation of the hand. The user can also modify the orientation of the hand, while keeping the hand centered at the same point in space. Finally, the user can control opening and closing of the hand, with two or three fingers. An external button may be used to switch between modes of control. The control is customized to the user’s needs and capacities. JACO can reach approximately 1 m in all directions and can lift objects of up to 2.5kg.
Method
Participants
A convenience sample of 7 participants was recruited at the Institut de réadaptation en déficience physique de Québec (Québec, Canada) and the Centre de réadaptation Constance-Lethbridge (Montréal, Canada). Each participant met the following inclusion/exclusion criteria: 1) being between 18 and 64 years old; 2) being able to understand verbal instructions in French or English; 3) using a powered wheelchair with standard joystick on a daily basis both indoor and outdoor; 3) being capable of pressing the command buttons of the robotic arm JACO; 4) having no cognitive or memory impairment; and 5) having normal or corrected vision.
Procedure
An experimental single-subject design was adopted. The participants had a JACO device installed on their wheelchair for approximately one month. Through this period, the participants were instructed to use JACO in their daily life. Each participant underwent baseline assessment without JACO (T0). Then, the JACO robotic arm was installed on the participant’s wheelchair. At this stage, each participant received a short training on the operation of the robotic device (1-2 x 60 minutes sessions, depending of their needs). Participants then developed their own abilities with the JACO robotic arm over a 1-month test period. During that time, they could contact the research team if they had needs for tips on how to use the arm. After the training sessions, an assessment with the device was conducted (T1). At the end of this 1-month period, a final assessment (T2) was conducted
Demographic, personal and clinical data
Demographic and clinical data were collected for each participant: sex, age, diagnosis, major comorbidities that could affect the JACO use, number of years using any wheelchair were recorded, etc.
Measurements
To evaluate the participants’ changes in independent living and social participation, three tools were used: 1- the Assessment of Life Habits at T0 and T2 (Life-H version 3.0) (Noreau, Fougeyrollas & Vincent, 2002), 2- the Upper extremity performance test for the elderly at T1 and T2 (TEMPA) (Desrosiers, Hebert, Bravo & Dutil, 1995), and 3) a daily logbook from T1 to T2. Sixty-two life habits were identified as relevant for this project. They were chosen because of the possibility that the JACO could meet a need for reaching or grasping. We used the TEMPA to evaluate performance during the execution of five bilateral tasks (e.g. grab and open a jar and turn a key in a keyhole) and four unilateral tasks (e.g. pour water into a glass and grab small objects). To better reflect the use of the robotic arm, five tasks were added to the TEMPA to measure the participants’ ability to accomplish manual tasks with the JACO since no such measuring scale exists in the scientific literature. These additional tasks were identified from usability tests of the JACO previously conducted by our team (Maheu et al., 2011). They were: pick up a straw and place it in a glass, pick up a bottle and pour water in a glass, push on the buttons of a calculator, turn over a glass jar, and slide a token on a board. Finally, participants had to complete a logbook at the end of each day. They were asked to indicate which tasks, activities or life habits (e.g. grab a glass of water, reach for a book, perform bank transfers, prepare meals, etc.) they performed with the robotic arm during the day. Comments regarding the problems and difficulties encountered with the robotic arm could also be noted.
For the Life-H and the TEMPA, we were interested in each individual item (life habit or task). For the daily logbook, we identified individual tasks, activities or life habits named by the participants. To score the performance of participants pre (T0 or T1) and post (T2) JACO, we used the following procedure. Since using a robotic arm can produce an anticipated change (in the Life-H, TEMPA or logbook items) from ‘not able to accomplish a specific task, activity or life habit without the robotic arm’ to ‘able to accomplish a specific task, activity or life habit with the robotic arm’, we used a two-level score: a) can complete the task, activity or life habit, and b) cannot complete the task, activity or life habit. The advantages of proceeding that way seem to overweigh the disadvantages (e.g. possible changes in measurement properties of tools) since no adequate measure actually exists to evaluate devices such as robotic arms. We therefore calculated count data of positive changes (or ‘frequency of improvement’) on Life-H, TEMPA and logbook items with the use of JACO for each participant (improvement of independent living or social participation). For certain participants, some items of the Life-H were not applicable. Also, from the logbook, numbers of items differed. Therefore, the maximum number of items varied among participants.
The short version (10 items) of the Psychosocial Impact of the Assistive Device Scale (PIADS-10) (Jutai & Day, 2002) was used to evaluate the impact of the robotic arm on the participants’ QoL (10 different dimensions) after the 1-month experimental period. Each item score varied from -3 to +3 (7 levels, when the score is greater than 0 we have a positive impact). The Quebec User Evaluation of Satisfaction with Assistive Technology (QUEST) (Demers, Weiss-Lambrou & Ska, 2002) was used to collect data on the perception of the participants’ satisfaction with the JACO after the 1-month experimental period. Only the sub-scale associated with the technology was evaluated. Each item score varied from 1 (not satisfied at all) to 5 (very satisfied). PIADS-10 and QUEST mean scores were calculated.
Analysis
Because of our small sample size and the nature of the research design, only descriptive statistics have been computed. Frequency, mean and standard deviation had been used to report characteristics of the participants and outcomes (count data of positive changes, satisfaction and QoL). Our experimental procedure was documented quantitatively and qualitatively.
Results
Table 1 summarizes main participants’ characteristics who all completed the 1-month experimental period. No adverse event was reported. Tests/questionnaires and experimental procedure were well tolerated. Table 2 summarized outcomes for each participant: Frequency of improvement, QoL and satisfaction). Forty of the 64 Life-H items have improved for at least one participant. The highest frequency of improvement for a single item was 4, for only one item (using a glass or a cup). Seventeen Life-H items improved only once (one participant). We did not measure time to collect data, but our experience indicates that assessment could take up to 4 hours. In some cases, because the TEMPA tasks’ were too difficult, some participants tried several times to complete them. Finally, the logbook was not completed on a regular basis, even with insistent follow-up by the research team.
| Characteristics | Value |
|---|---|
| Age (years) | |
| Mean±SD | 31.2±10.6 |
| Gender | |
| Male | 5 |
| Female | 2 |
| Living with | |
| Alone | 2 |
| 1 individual | 2 |
| 2 individuals | 1 |
| 3 individuals | 2 |
| Type of residence | |
| House | 3 |
| Apartment/Condo | 3 |
| Long term care facility | 1 |
| Diagnostic group | |
| Spinal cord injury | 3 |
| Muscular dystrophy | 4 |
| Wheelchair experience | |
| Less than 2 years | 1 |
| 2 to 5 years | 1 |
| 5 to 10 years | 2 |
| Over 10 years | 3 |
| Method for controlling JACO | |
| Hand | 5 |
| Foot | 1 |
| Cephalic | 1 |
| Participant | Frequency of improvement | PIADS-10 | QUEST | ||
|---|---|---|---|---|---|
| Life-H | TEMPA | Logbook | |||
| 1 | 2 | 0 | 6 | 1.4 | 4.9 |
| 2 | 8 | 6 | 4 | 2.2 | 4.5 |
| 3 | 1 | 1 | 2 | 2.5 | 4.4 |
| 4 | 6 | 4 | 4 | 0.6 | 4.4 |
| 5 | 5 | 5 | 5 | 1.4 | 4.3 |
| 6 | 0 | 0 | 2 | 1.1 | 4.5 |
| 7 | 0 | 2 | 4 | 0.1 | 2.6 |
| Mean±SD | 3.1±3.2 | 2.6±2.4 | 3.9±1.5 | 1.3±0.8 | 4.2±0.7 |
discussion
We accomplished our objectives of investigating if the JACO robotic arm could improve independent living and social participation of individuals with upper extremity impairments, and also of documenting the users’ perceived satisfaction and QoL. In a home/community setting, we observed that JACO led to improvements in various tasks, activities, or life habits within a 1-month time period. When grouping frequencies of improvement of the LIFE-H, TEMPA and logbook, we obtained a mean of 9.6±6.1 improved items. Our results also indicate that participants had a positive perception of their QoL when using a robotic arm such as JACO (PIADS-10=1.3/3.0). Participants were also very satisfied with the assistive device per se (QUEST=4.2/5.0). Although these are interesting results, we cannot say if the observed improvements were significant or not to the participants. It is noteworthy to mention that, during informal discussions with participants at T2, they generally indicated feeling that some improvements were to them very important and significant. Additionally, they also mentioned that the use of JACO resulted in a very high sense of independence for them.
Based on our experience with this project, further improvements that should be made in future research protocols on robotic arms benefits are proposed. First, instead of assessing JACO’s impact on a large number of tasks, activities or life habits, it would be advisable to target the ones that are most important or that are in line with a desired goal with the JACO. The Canadian Occupational Performance Measure (COPM)is a tool that could contribute to the attainment of this objective (Law, Baptiste, Carswell, McColl, Polatajko & Pollock, 1998). Second, it would be appropriate to complete a formal qualitative interview at various points throughout the experimental period, but primarily at the end of it. Third, the JACO may have benefits on users, as we partly demonstrated in this exploratory study (stronger data could still be collected to demonstrate that hypothesis). However, as caregivers are generally involved with those who will be using robotic arms, it seems important to also document the potential benefits of JACO from their perspectives, including their burden. Finally, we do not have any objective measure of use for the robotic arm, such as the required time for completing a certain task with JACO. To get this type of data, a data logger should be added to the protocol (on JACO) to collect kinematic data. Currently, it’s possible to collect data over a couple of hours in a clinical or laboratory setting, but not at home or in community setting over several days of use.
conclusion
Although our sample size was small, this exploratory project demonstrates the potential benefits of JACO for individuals with upper limb impairments. Our pilot results support the hypotheses that the JACO can improve independent living and social participation. JACO is well appreciated by users, and it has a positive impact on QoL. To attain valid and generalizable conclusions, additional data need to be collected in home/community setting with a larger sample, stronger research design and better assessment tools. This exploratory study provides valuable information and knowledge to conduct future studies.
References
Anderson, K.D. (2004). Targeting recovery: priorities of the spinal cord-injured population. Journal of Neurotrauma, 21, 1371-1383.
Chang, P.H., & Park, H.S. (2003). Development of a robotic arm for handicapped people: A task-oriented design approach. Autonomous Robots, 15, 81-92.
Dahlgren, A., Karlsson, A.K., Lundgren-Nilsson, A., Fridén, J., & Claesson, L. (2007). Activity performance and upper extremity function in cervical spinal cord injury patients according to the Klein-Bell ADL Scale. Spinal Cord, 45(7), 475-84.
Demers, L., Weiss-Lambrou, R., & Ska, B. (2002). The Quebec User Evaluation of Satisfaction with Assistive Technology (QUEST 2.0): an overview and recent progress. Technology & Disability, 14(3). 101-105.
Desrosiers, J., Hebert, R., Bravo, G., & Dutil, E. (1995). Upper extremity performance test for the elderly (TEMPA): normative data and correlates with sensorimotor parameters. Archives of Physical Medicine & Rehabilitation, 76(12), 1125-1129.
Driessen, B.J., Evers, H.G., & van Woerden, J.A. (2001). MANUS - A wheelchair-mounted rehabilitation robot. Proceedings of the Institution of Mechanical Engineers [H] 215, 285-290.
Jutai, J., & Day, H. (2002). Psychosocial Impact of Assistive Devices Scale (PIADS). Technology & Disability, 14(3), 107-111.
King, C.H., Chen, T.L., Fan, Z., Glass, J.D., & Kemp, C.C. (2012). Dusty: an assistive mobile manipulator that retrieves dropped objects for people with motor impairments. Disability and Rehabilitation: Assistive Technology, 7, 168-179.
Law, M., Baptiste, S., Carswell, A., McColl, M.A., Polatajko, H., & Pollock, N. (1998). Canadian Occupational Performance Measure (2nd ed. Rev.) Ottawa, ON: CAOT Publications ACE.
Maheu, V., Frappier, J., Archambault, P.S., & Routhier, F. (2011). Evaluation of the JACO robotic arm: Clinico-economic study for powered wheelchair users with upper-extremity disabilities. IEEE Int Conf Rehabil Robot, Zurich, June 29-July 1, 472-476.
Noreau, L., Fougeyrollas, P., & Vincent, C. (2002). The LIFE-H: Assessment of the quality of social participation. Technology and Disability, 14(3), 113-118.
Routhier, F., & Archambault, P. (2010). Usability of a joystick-controlled six degree-of-freedom robotic manipulator. RESNA 33rd International Conference on Technology and Disability: Research, Design and Practice, Las Vegas, USA. June 26-30.
Wang, H., Candiotti, J., Shino, M., Chung, C.S., Grindle, G.G., Ding, D., & Cooper, R.A. (2013a). Development of an advanced mobile base for personal mobility and manipulation appliance generation II robotic wheelchair. Journal of Spinal Cord Medicine 36(4): 333-346.
Wang, H., Xu, J., Grindle, G., Vazquez, J., Salatin, B., Kelleher, A., Ding, D., Collins, D.M., & Cooper, R.A. (2013b). Performance evaluation of The Personal Mobility and Manipulation Appliance (PerMMA). Medical Engineering & Physics, 35(11), 1613-1619.
Aknowledgements
This project was funded by the Center for Interdisciplinary Research in Rehabilitation (CRIR) of Greater Montreal. Authors would like to thank Kinova Inc. (Montréal, Canada) for their strong collaboration.
Audio Version PDF Version