A Fighting Bid (University of North Carolina at Chapel Hill)
Lydia Hatfield, Mae-Lyn Leonard, Brian Castro, William James
Introduction and Background
Molly is a five year old kindergarten student who was in an accident that left her with spinal cord injuries that resulted in paraplegia. Molly has damage to either the T4-T5 or T5-T6 regions of her spinal cord. Damage to these regions results in the loss of control of one’s legs and affects the control of the trunk to varying levels [1]. Because of this injury, Molly spends most of her day in a wheelchair. Being in a wheelchair diminishes her ability to fully interact and engage with her peers. During “carpet time” throughout the day children are learn and play together on the floor. At present Molly can get out of her wheelchair independently through a method that combines sliding and lowering herself to her footplate and then to the floor. When it is time to return to her wheelchair, she is lifted back into it by her aide. This current method is not always practical or safe and seriously limits Molly’s much desired independence.
Currently there are few devices available on the market to assist children in transferring between their wheelchairs and the floor. One such commercially available device is the Bottoms Up Bar [2]. It is essentially a seat with hand grips that is placed in front of a wheelchair. Users slide themselves to the seat and then to the floor. The problem with this system is that it is not dimensioned to accommodate a child’s size and strength. We are not aware of any device designed to facilitate a child’s transferring independently between the wheelchair and the floor.
Project Goals
The goal of this project is to develop a device or method that would allow Molly to get in and out of her wheelchair with minimal to no assistance. Most importantly, the device or method must be safe and easy for the child to use. Since Molly already has a quick, though not very safe, method to get to the floor, the new system must get her to the floor quickly, or she is not likely to use it, preferring instead the old method so she can get down as fast as possible. The device should also facilitate Molly’s independent return to her wheelchair and be portable so that she can use it at home as well as in the classroom.
Design and Development
 Device Retracted Under Wheelchair in Stored Position
Device Retracted Under Wheelchair in Stored PositionThe device (Figure 1) we designed to fulfill the goal of offering Molly and others like her greater independence of movement, consisted of a fabricated unit of two platforms or seats arranged step-wise to slide like a drawer from under the seat of Molly’s wheelchair. The device was anchored to the underside of the wheelchair by means of four aluminum tube clamps. The bottom seat stands safely 7 inches above the floor with extendable foot pegs that make up the difference. The design allows Molly to scoot at will from her wheelchair down onto the floor and also to easily and safely lift herself, using wheelchair-attached handles, up the two platforms again before returning them to their resting position back under the seat. During typical wheelchair use with the steps retracted, the bottom step also functions as a footplate.
I. Steps
 Device Extended out from Wheelchair Before Foot Pegs are Deployed
Device Extended out from Wheelchair Before Foot Pegs are DeployedThe main aspect of the device is a two-step sliding staircase which fits in the extruded t-slot frame under the wheelchair. The sliding staircase is composed of a ¼” polypropylene top step fastened to a ¼” machined aluminum bottom step. The outside edges of the polypropylene top step fit into the inside facing slots of the frame assembly and parallel aluminum runners line the underside of the step, just medial to the slots on the frame. This creates a track for the staircase to slide in and out of the frame assembly. The bottom step is fastened to the top step on its outside edges by two 3/16” thick aluminum plates that make a 5 ½” space between the steps. Extended out, the device allows for a 7” distance from the bottom step to the ground, which is within the range that the client can lift herself. When the step assembly is in the stored position under the wheelchair, the bottom step is used as the client’s foot plate. All edges and corners on the aluminum step have been rounded to avoid possible scraping or irritation to the client’s back while the device is in use.
II. The Extruded T-Slot Frame
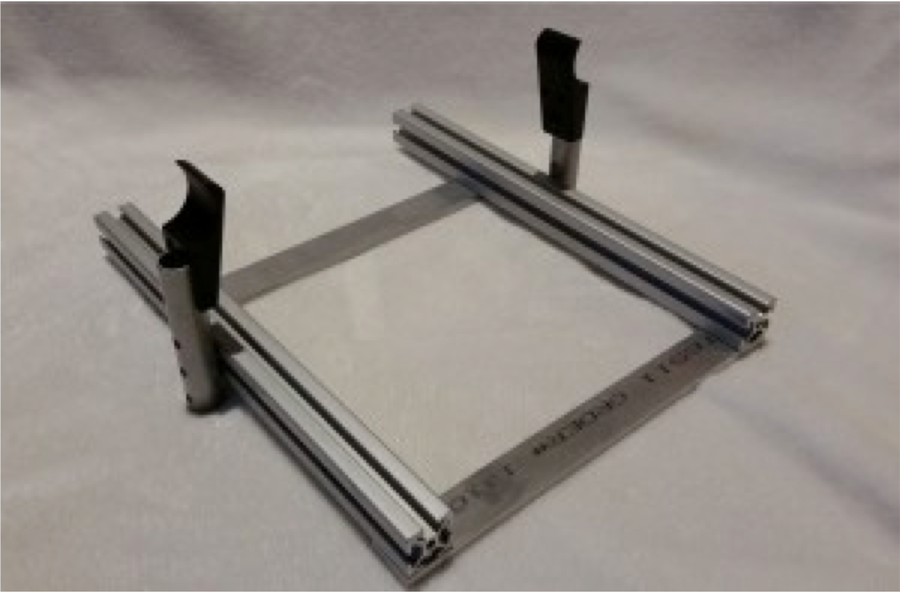 Extruded T-Slot Frame with Supporting Cross Bars and Wheelchair Attachments
Extruded T-Slot Frame with Supporting Cross Bars and Wheelchair AttachmentsThe frame (Figure 3) for the device is attached to the wheelchair using attachment clamps from Ki Mobility (Stevens Point, Wisconsin, www.kimobility.com). The top step slides in and out of the grooves of an extruded T-slot frame. The aluminum extruded t-slots that were used have a 1 inch extrusion size and a ¼ inch slot width. The edge of the top step rests inside the slot of the frame and slides along the track. On the underside of the frame are two aluminum crossbars that provide structural support for the frame as well as limit the step assembly’s extension and retraction to the intended range of motion. The device is prevented from being pulled too far forward by plastic end caps on the T-Slot channels. The T-Slot frame is dimensioned so that when the device is completely retracted it is directly under the client’s seat but is able to extend to a full 4.5 inches for use.
III. Handles
 Handles Attached to Front of Wheelchair Frame
Handles Attached to Front of Wheelchair FrameThe pair of handles (Figure 4) are permanently attached to the tubing of the wheelchair using the same clamps that are used to attach the frame assembly to the wheelchair. These handles are 9 inch long ¾ inch aluminum tubes covered with rubber grips. The client uses these handles to both move from the floor to the bottom step and to move from the bottom step to the top step. The device allows the client to use the frame of the wheelchair as the handles needed to assist in the transfer from the top step to the seat of the wheelchair.
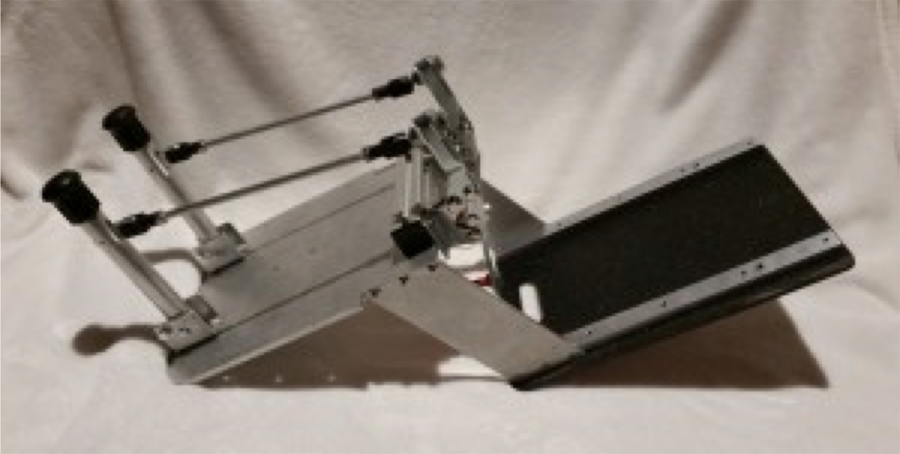
IV. Foot Pegs with Locking Mechanism
 Foot Pegs with Locking Mechanism in Retracted Position
Foot Pegs with Locking Mechanism in Retracted PositionIn order to prevent the wheelchair from tipping forward with the device and to reduce the amount of total possible impact force sustained by the wheelchair, the bottom step has locking foot pegs (Figures 5 and 6) attached that meet the ground when the device is in use. The foot pegs are fabricated from ¾ inch aluminum tubing and are mounted in a one-directional bracket to the underside of the foot plate. Attached to each foot peg is a two-point-rotating rod linkage similar to a shift linkage on a car. The other ends of the linkages are connected to two toggle clamps mounted to an aluminum extruded t-slot on the backside of the footplate. The toggle clamps push and lock the foot pegs out when the user pulls the clamp handle forward for use. When not in use, the foot pegs are pulled up and locked under the step by pushing the clamp handle backwards.
Evaluation
 Foot Pegs with Locking Mechanism in Extended Position
Foot Pegs with Locking Mechanism in Extended PositionOur design has been tested and evaluated for safety, independence, quickness of use, and mobility. Each one of these criteria has undergone both verification and validation processes. Materials properties have been tested and force calculations have been made to ensure that all components of the device can support, with a 2.5 safety factor, the impact and weight of our client. The device has also been lab tested to confirm that it can support 200 pounds at any given point. Each stage of the design has been tested with the client to ensure that she can use all the components independently. The device has been tested in the client’s kindergarten classroom to ensure that she can be fully mobile in an ordinary classroom space and that the new device does not compromise normal wheelchair functions. Both the teacher and the client’s aide have confirmed this. Finally, when the client was timed using the device, her ability to leave and to return to the wheelchair expeditiously fell within the design specifications.
Discussion and Conclusions
Our device has successfully met each of the criteria proposed in our design specifications. It succeeds in providing our client with the independence that she desired, offers her a more normal childhood experience, and allows her to fully engage with her peers, thereby enriching her school experience. Her classroom aide Savada Gilmore concurs with our success, stating, “What Lydia Hatfield and the crew have accomplished here is nothing short of amazing and awe-inspiring. Through tireless and selfless dedication, diligence, and imaginative innovation, these youngsters have undoubtedly fully realized what it means to play a part and moreover, have a major impact on something much larger than themselves. In doing so, they have effectively shifted tragedy into triumph by providing hope, through strength and perseverance, and lighting a path for what will surely be a tough road ahead for one special little girl”. It is our hope that this device will give her independence until she grows out of it and moves into the next phase of her independent mobility.
References
[1] Shepherd Center. (2013). Levels of Injury [Online].Available: http://www.spinalinjury101.org/details/levels-of-injury:
[2] AbleData. (2013, February 3). Transfer Aid: Bottoms Up Bar [Online].Available: http://www.abledata.com/abledata.cfm?pageid=19327&top=12645&ksectionid=19327&productid=204609&trail=0&discontinued=0:
Acknowledgments
We would like to thank the National Science Foundation for the grant they graciously provided for us to design and fabricate our device. We would also like to thank Scott Woempner of the Woempner Machine company for his countless hours assisting us in the machining and refining of the device. Without Scott, our device would most likely fall short of ours and our client’s expectations, but with Scott, we have soared above and beyond our desires and goals for this device. We would also like to thank Savada Gilmore for his encouragement and support in making this device perfect for our client. Thank you to Dana Kropf for pushing for our client to receive our help and giving us the opportunity to be inspired by such a willing and determined child. Finally we would like to thank Devin Hubbard and Richard Goldberg for guiding us through this process.