POSITIVE REINFORCEMENT SYSTEM DESIGN FOR THERAPEUTIC DEVICES
Chase M. Pfeifer, PhD1, Judith M. Burnfield, PhD, PT1, Srinivas Kota, PhD1, Thad W. Buster, MS1, Sonya L. Irons, PT, DPT, CCS1, Douglas A. Rowen1, Carl A. Nelson, PhD, PE2
1Institute for Rehabilitation Science & Engineering, Madonna Rehabilitation Hospital, Lincoln, NE
2Mechanical & Materials Engineering, University of Nebraska - Lincoln
ABSTRACT
Many children with disabilities and chronic conditions need to engage in therapeutic exercise to improve fitness and function. Often, the devices used for training provide only limited encouragement and feedback on performance. Additionally, few provide auditory feedback for children with visual impairments. To overcome these challenges, we developed an interactive positive reinforcement system that provides children with feedback regarding their physical effort. The system was integrated with a prototype Pedi-ICARE, a motor-assisted elliptical training device developed to improve children’s walking and fitness. The positive reinforcement system’s development and evaluation are detailed. It is evident that the system could be useful in providing feedback during therapy to heighten motivation and engagement in therapeutic activities important for function and health; however, further refinements are required to fine tune feedback frequency to each child’s unique training parameters and capabilities.
Keywords: positive reinforcement, therapeutic device, physical disability, gait
BACKGROUND
It is not uncommon to use positive reinforcement as a behavioral approach along with other therapies to yield greater functional improvement compared to therapy alone. For example, a program of positive reinforcement resulted in greater gains in upper-extremity strength with paraplegic and quadriplegic patients versus a nonverbal reinforcement program (Trotter, 1968). It is evident from this and a number of other studies that positive reinforcement along with conventional rehabilitation can yield better functional outcomes in individuals with disabilities.
The ICARE (an Intelligently Controlled Assistive Rehabilitation Elliptical) (Burnfield, 2011; Nelson, 2011) is a patented technology developed for use in hospitals, fitness facilities, and homes to help adults with physical disabilities improve their walking and cardiovascular fitness. The technology integrates a motor and accessibility features with an elliptical trainer to overcome barriers that many individuals with physical disabilities and chronic conditions face when trying to exercise on traditional ellipticals. A unique feature of the ICARE is that the motor helps patients move their legs by introducing propulsive force to the foot pedals in an “active assist” (AA) condition. In the “active assist plus” (AAplus) condition, the motor disengages when a patient makes an effort to make the machine go faster than his/her selected comfortable speed. Users’ joint motions and muscle activation patterns during ICARE use closely emulate the mechanics of over-ground walking (Burnfield 2010), thus creating opportunities for users to practice an activity important not only for fitness, but also function.
The ICARE addresses some of the labor and / or expense limitations with existing physical therapy devices such as partial body-weight support treadmill (PBWST) (Hesse, 1995), conventional overground training (COGT) (Bogataj, 1995), and robotic technologies such as the Lokomat (Hidler, 2009). An ICARE therapy session does not require as much therapist assistance as would be required in typical gait training, such as COGT and PBWST, because the ICARE’s motor moves the pedals versus the clinician advancing the limbs. It is also less expensive than many robotic technologies.
Interactive consoles that allow the patient to watch a movie, play video-games, and watch themselves on a monitor are often used to motivate patients and serve as a distraction in pain management during therapy. While some consoles are used primarily for distraction or entertainment, others can be used to engage and reinforce effort. Currently, many cardiovascular fitness devices used for rehabilitation do not have integrated reinforcement programs that can be easily tailored to the needs of a child or adult user.
PURPOSE
The Institute for Rehabilitation Science and Engineering at Madonna Rehabilitation Hospital is currently developing an ICARE to meet the needs of pediatric patients in both size and functionality (Pedi-ICARE). The purpose of this research was to develop a simple positive reinforcement system for the Pedi-ICARE trainer.
METHODS
Hardware Design
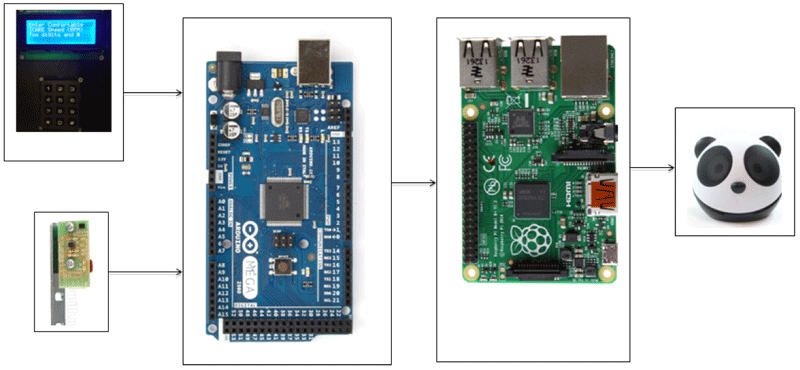
The positive reinforcement system was designed around the Arduino Mega 2560 prototyping microcontroller platform and Raspberry Pi Model B+ single-board computer. An optical switch (E872MA-627, SportsArt Inc.) was placed within 5 mm of the Pedi-ICARE’s drive pulley so that the phototransistor in the optical switch could recognize the Pedi-ICARE’s wheel rotations (in revolutions per minute or RPM). The optical switch was connected to the Arduino to calculate the Pedi-ICARE system’s speed. This calculation was implemented in a script written in C programming language for Arduino. The Arduino script was uploaded via the Arduino IDE on a computer.
The first line in the display unit showed the patient’s self-selected speed (Vs), and the second line showed the current speed (Vc) of the Pedi-ICARE as measured in RPM with the optical sensor. Vc was calculated using equation 1:
(1)
where Nt is the number of transitions detected by the phototransistor over time t in minutes and Nr is the number of transitions for one rotation.
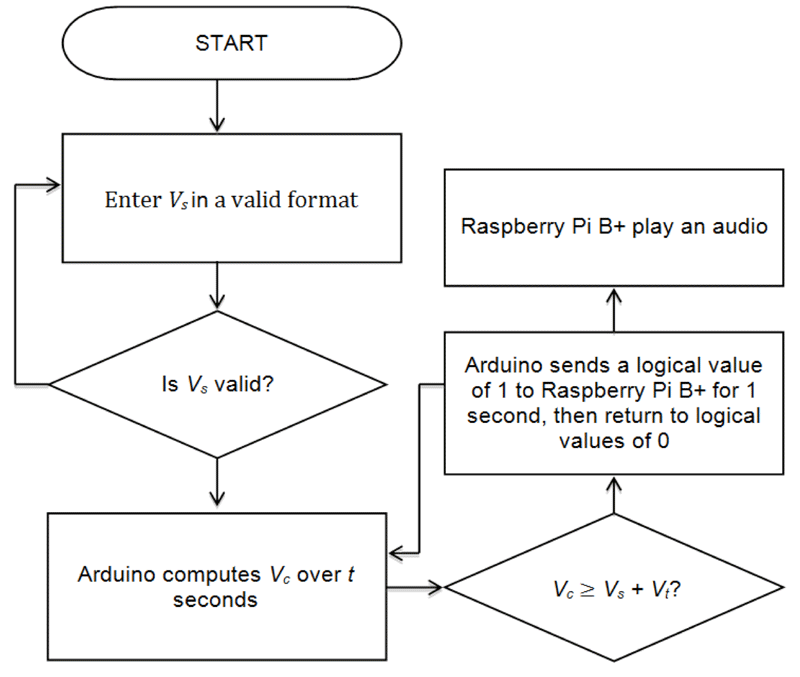
The Arduino monitored and measured the speed of the Pedi-ICARE over time t and output a logical value of 1 (or TRUE) for 1 second to the Raspberry Pi B+ when the current speed (Vc) exceeded the self-selected speed (Vs) plus the speed threshold (Vt). During AA condition Vt = 0 while Vt > 0 during AAplus condition.
Thirty-three audio files for positive reinforcement (e.g., awesome work, good job, etc.) were recorded using Audacity software by three physical therapists (two female and one male) and two girls (ages 7 and 9). The audio files were saved on the memory card of the Raspberry Pi B+. In the AAplus condition (Vc >= Vs + Vt), one of the audio files was selected randomly and played through a child-friendly speaker (Panda) placed near the console of the Pedi-ICARE system.
Operation
The display unit showed instructions to input the patient’s comfortable speed through a 4-row, 3-column matrix keypad. The Arduino script contained hard-coded initial values for the slowest and fastest Pedi-ICARE speeds (15 and 70 RPM) and for the time period (t). The Arduino script checked for a valid comfortable self-selected speed. The patient’s self-selected speed should be between the clinically meaningful speeds of 15 RPM and 70 RPM.
The third line in the display relayed ‘current speed > comfortable speed’ when the current speed (Vc) exceeded the self-selected speed (Vs) plus the speed threshold (Vt) and is blank otherwise. Finally the fourth line displayed ‘hold any key to reset’ to enter a new comfortable speed. The therapist could change the self-selected speed on this unit at any time by holding any key on the matrix pad during a session if the patient wished to select a new target speed.
A flowchart for functionality of the positive reinforcement system is shown in Figure 2.
Clinical Evaluation
During the second session the children and a parent evaluated the Pedi-ICARE features and provided feedback. Nineteen children with no disabilities (13 female, 6 male; age range, 3 to 12 years; average age, 7.5 years) and seventeen children with a disability and/or chronic condition (13 female, 4 male; age range, 4 to 12 years; average age, 8.4 years) completed session two. Participants initially trained in the AA condition to become acquainted with the machine and then switched to AAplus to evaluate operation of the positive reinforcement system when the child exceeded the motor’s threshold speed.
RESULTS
At the end of the AAplus condition, the children, parents, and researchers were asked whether the feedback he or she received from the Panda speaker was “too much, too little, just right, or other.” If “other” was selected then they were queried for additional details. Parents and children’s responses are provided in According to Error! Not a valid bookmark self-reference., the most common response on feedback received was “just right”. Overall it was found that the 22% of the time participants felt that the feedback was “too much” while 28% of the time the parents thought there was “too little” feedback. In the initial design, the amount of feedback received depended on the duration of the AAplus condition. For example, if a child performed the AAplus condition for 10 seconds, the positive reinforcement system provided feedback only once. In contrast, if the child performed the condition for 3 minutes, the positive reinforcement would occur approximately 18 times, thus becoming potentially excessive.
According to Error! Not a valid bookmark self-reference. , the most common response on feedback received was “just right”. Overall it was found that the 22% of the time participants felt that the feedback was “too much” while 28% of the time the parents thought there was “too little” feedback. In the initial design, the amount of feedback received depended on the duration of the AAplus condition. For example, if a child performed the AAplus condition for 10 seconds, the positive reinforcement system provided feedback only once. In contrast, if the child performed the condition for 3 minutes, the positive reinforcement would occur approximately 18 times, thus becoming potentially excessive.
| Participants | Outcome | Participant (%) | Parent (%) |
|---|---|---|---|
| Control (n=19) | Too much | 21.1% | 15.8% |
| Too little | 21.1% | 21.1% | |
| Just right | 57.9% | 47.4% | |
| Other | 0.00% | 15.8% | |
| Disability group (n= 17) | Too much | 23.5% | 5.9% |
| Too little | 17.7% | 35.3% | |
| Just right | 41.2% | 35.3% | |
| Other | 17.7% | 23.5% | |
| Total (n= 36) | Too much | 22.2% | 11.1% |
| Too little | 19.4% | 27.8% | |
| Just right | 50.0% | 41.7% | |
| Other | 8.3% | 19.4% |
CONCLUSION
Clinicians and teachers working with children who are engaged in therapeutic physical activity may need to divide their attention across multiple children. As a result, it may be difficult to acknowledge and reinforce when a child has exerted increased effort (e.g., overcoming a motor or walking at a faster speed). The primary goal of this study was to design a simple and automated positive reinforcement system that required minimal set-up from the therapist and provided children with performance-related encouragement during therapy without requiring a clinician’s or parent’s constant supervision. This goal was achieved through integration of custom electronics to the Pedi-ICARE at a cost of roughly $100. This system could be adapted to a number of sensor types and rehabilitation machines.
The secondary goal was to assess the developed system during Pedi-ICARE evaluation sessions. The responses received from participants and their parents regarding the amount of feedback provided by the positive reinforcement system suggest the prototype system was generally well received, but that further customization is needed to adjust to each child’s unique training parameters and capabilities.
FUTURE WORK
Continued development is taking place to condense the system into a single microcontroller, the Raspberry Pi Model B+, to control the system. Advancements to the audio system will also be addressed, for example, having an audio library for the patient where someone familiar to them such as a parent, friend, or therapist has recorded encouraging phrases. Work is also being performed to add a visual interface into the system. Such an addition would affect patients with hearing loss and could allow for encouraging video files, special to the patient, to be uploaded as well.
REFERENCES
- Bogataj, U., Gros, N., Kljajić, M., Aćimović, R., & Maležič, M. (1995). The rehabilitation of gait in patients with hemiplegia: a comparison between conventional therapy and multichannel functional electrical stimulation therapy. Physical Therapy, 75(6), 490-502.
- Burnfield, J. M., Shu, Y., Buster, T. W., Taylor, A. P., & Nelson, C. A. (2011). Impact of elliptical trainer ergonomic modifications on perceptions of safety, comfort, workout, and usability for people with physical disabilities and chronic conditions. Physical Therapy, 91(11), 1604-1617.
- Burnfield, J. M., Shu, Y., Buster, T., & Taylor, A. (2010). Similarity of joint kinematics and muscle demands between elliptical training and walking: implications for practice. Physical Therapy, 90(2), 289-305.
- Hesse, S., et al (1995). Treadmill training with partial body weight support compared with physiotherapy in nonambulatory hemiparetic patients. Stroke, 26(6), 976-981.
- Hidler, J., et al (2009). Multicenter randomized clinical trial evaluating the effectiveness of the Lokomat in subacute stroke. Neurorehabilitation and Neural Repair, 23(1), 5-13.
- Nelson, C. A., Burnfield, J. M., Shu, Y., Buster, T. W., Taylor, A. P., & Graham, A. (2011). Modified elliptical machine motor-drive design for assistive gait rehabilitation. Journal of Medical Devices, 5(2), 021001.
- Trotter, A. B., & Inman, D. A. (1968). The use of positive reinforcement in physical therapy. Physical Therapy, 48(4), 347-352.
ACKNOWLEDGEMENT
This work was supported in part by a grant initially received from the Department of Education, NIDRR (grant number H133G130274) now Administration for Community Living NIDILRR (grant number 90IF0060).