1Korea Orthopedics & Rehabilitation Engineering Center, Incheon, S. Korea 2Department of Mechatronics Engineering, Dong-Eui University, Busan, S. Korea
ABSTRACT
This paper proposes a design of low-floor care bed to descend to a floor level position in order to assist activities of daily living of aged people at home. Most of care bed is difficult to implement the low-floor mechanism because a space under bed is needed due to a complex mechanism. In this paper we propose a novel design for low-floor care bed of which back and leg-rest are adjustable using a twin drive motor. A prototype low-floor care-bed is developed based the design, and then a usability test with five subjects is performed. By evaluating the usability test we show that the low-floor bed is feasible to care at home.
INTRODUCTION
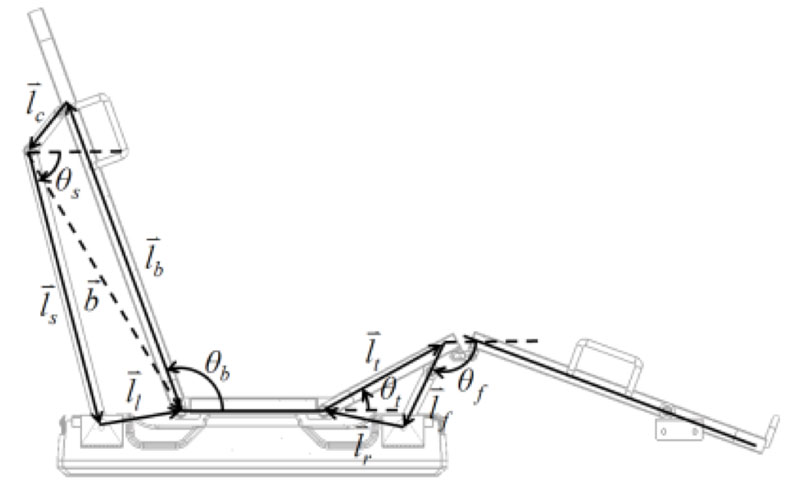
Figure 1: Design model of angle adjustable mechanism.
Electric adjustable bed is a typical assistive product for home care. As increasing the number of elderly populations in the world, many countries have started public or private insurance systems for elderly persons. In Korea a public long-term care insurance system for elderly persons has been started since 2008, and the electric adjustable bed was selected as one of insurance benefits. However most of beds registered in the public insurance system were hospital beds intended for hospital use not for home care. Moreover the basic position of beds is almost 300mm height, which is not familiar to the elderly persons in Korea because Korean living style is floor-bedding culture. In addition the high position of bed makes users need additional assistive products for transfer and turning or for lifting persons like a hoist [1].
In this paper we propose a modeling of low-floor bed which is possible to descend to a floor level for home care for persons with disability in Eastern-Asian countries. Since Korea and Japan have been a floor-bedding culture, the bed users especially the elderly persons have demanded to use the low-floor bed at home.
Some users would complain of uneasiness caused by a high position on bed, but the high position is still necessary for caregivers to care them. So a solution to satisfy such social demands is to develop a novel bed adapted to life style; the height of bed is adjustable to a low-floor position, and it is still able to adjust back- and leg-rest angles as well as a conventional care bed.
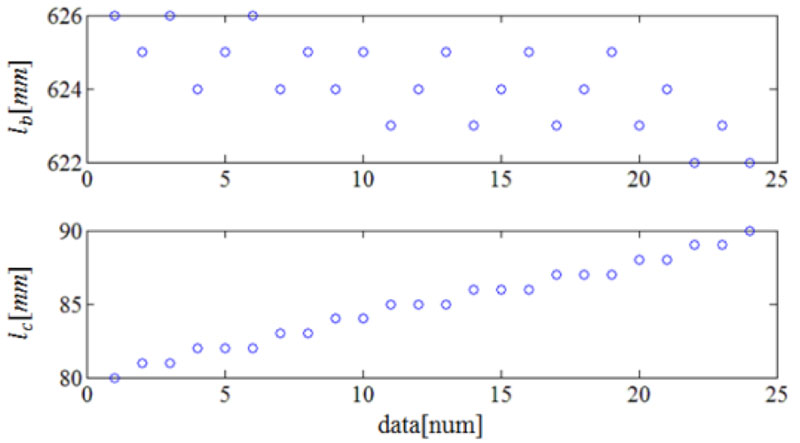
Figure 2: Candidates of design parameters for back-rest mechanism
We propose a modeling and design for a low-floor bed which adjusts the height and angles of back- and leg-rest. To reduce the space under the mattress support platform a twin drive motor (TDM) is used in the design. In addition we propose a new height adjustable mechanism using two linear actuators. All design is based on results of kinematic analysis of the mechanism. Then a prototype low-floor bed is developed and a usability test is performed to verify feasibility in home use of Eastern-Asian people.
LOW-FLOOR CARE BED
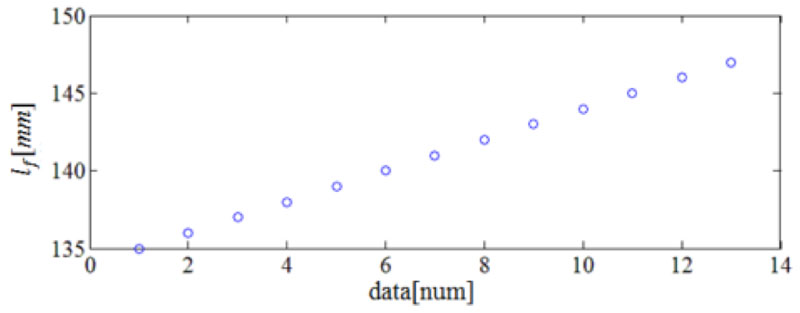
Figure 3: Candidates of design parameter for leg-rest mechanism
The international standard IEC60601-2-52 [2] defines requirements and safeties of beds for persons with disability. The main functions are adjustable in height of mattress support platform and an angle of back-rest and leg-rest. A conventional beds used for care can adjust two or three degrees of freedom, but the bed to descend to floor level were not existed due to a complexity mechanism under the mattress support platform and a general height-adjustable mechanism. The low-floor care bed can be defined as a bed to be descended to floor level position, but it still has function to adjust back- and leg-rest angles.
Model of angle adjustable mechanism of low-floor care bed
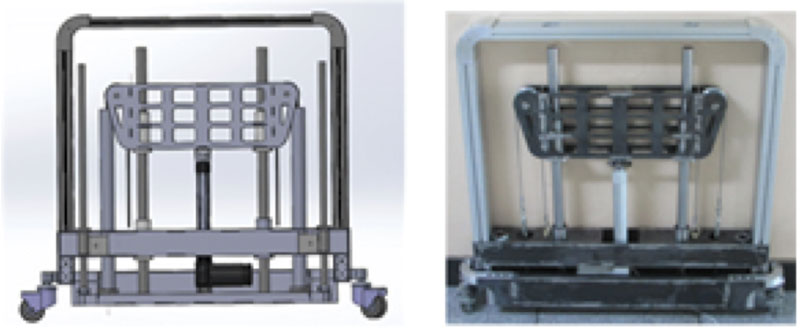
Figure 4: Developed low-floor bed
To implement a simple design of the angle adjustable mechanism of back- and leg-rest, we use a TDM of which the end of both actuators is connected a link called rotation link to transform the linear movement to rotation. Figure 1 shows a model of the back- and leg-rest mechanism using a TDM. Link
and link
which are corresponding to the back-rest and the leg-rest are rotated by the rotation link
and
, and the corresponding angles are notated by
and
respectively.
The design parameters such as the length of links
,
and
, can be obtained by using a plane vector equation. The relationship between links of back-rest mechanism in Figure 1 can be expressed by the following equation.
b ⃗+(l_b ) ⃗+(l_c ) ⃗=0 (1)
where b ⃗ is a virtual link corresponding to (l_s ) ⃗+(l_l ) ⃗ . Because (l_s ) ⃗ and (l_l ) ⃗ are constant values, b ⃗ can be calculated directly. Then the back-rest link (l_b ) ⃗ can be obtained the following equation.
(2)
Here l_b and l_c is the norm of (l_b ) ⃗ and (l_c ) ⃗ which are given, b ⃗^u is the unit vector of b ⃗, and k ⃗ is the unit vector of the vertical axis.
Similarly the relationship between links of leg-rest mechanism can be expressed by the following.
(l_t ) ⃗+(l_f ) ⃗+(l_r ) ⃗=0 (3)
where (l_r ) ⃗ is a virtual link connected the center of rotation of leg-rest to the center of rotation link and it is constant. The vector (l_t ) ⃗ is unknown except orientation. Consequently we only know its unit vector as follows.
(4)
where θ_t is the ROM of leg-rest and given value. Then the leg-rest link (l_f ) ⃗ can be obtained the following equation.
(5)
Optimization procedure
Figure 5: Pulley mechanism for height adjustment
To obtain the design parameters we applied an optimal method with boundary conditions. According to the standard [2,3] the range of motion (ROM) of θ_b is set to 0 to 70 degrees, and the ROM of θ_t is set to 0 to 30 degrees. According to the specification of TDM, the ROMs of the rotation link l_s and l_f were set to the maximum 80 degrees and 50 degrees respectively. They are the same as θ_s and θ_f. As described above the virtual lines l_l and l_r which are connected to the TDM from the center of rotation of back-rest and leg-rest, are constant values based on the specification of TDM. Moreover the rotation link l_s is also a fixed value. In the optimization the initial value and maximum value are given as follows: the back-rest angle θ_b is 0 when link l_s is at the initial horizontal position, i.e. θ_s=0, but θ_b=70 degrees when the link l_s is at the maximum position that is θ_s=80 degrees. Then the length l_b and l_c are given in the range of 500mm to 700mm for l_b and 60mm to 100mm for l_c, respectively. While changing 1mm steps within the ranges of l_b and l_c the position angles are obtained by equation (2). Figure 2 shows solutions of l_b and l_c obtained by optimization procedure. In the same way the optimal parameters for the upper-leg-rest mechanism can be obtained with conditions when is the initial position, and when is the maximum position.
Figure 6: Structure of main frame and analysis result
In the same way the optimal parameters for the upper-leg-rest mechanism can be obtained with conditions
when
is the initial position, and
when
is the maximum position. In the optimization procedure, is changed from 50mm to 150mm by 1mm step. As a result the obtained values to satisfy within the range of motion (ROM) are shown in Figure 3. Finally the link with shortest length is selected as the optimal design value from the candidate data. The selected optimal design parameters were
,
, and
.
Design of heigh adjustable mechanism
Figure 7: Experimental configuration
A height adjustable mechanism using a linear actuator needs an actuator with long-stroke length so that the bed satisfies a requirement of standard. However the long stroke length causes an unstable position.
Figure 8: User’s body position from floor to on bed.
A pulley mechanism as shown in Figure 5 is applied to the height adjustable mechanism. The designed pulley mechanism can extend the length of actuator stroke two times. Figure 5 shows the pulley mechanism developed. The maximum adjustable height is 500mm though the stroke of actuator is 250mm, and we could achieve a stable low-floor care-bed which adjusts the lowest position 50 mm to the highest position 550mm.
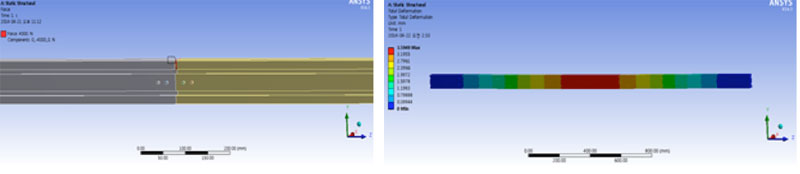
Design of main frame
To implement an assembly-type bed we designed an assembling main frame shown in left of Figure 6. To verify a safety we performed a stress test by 4000 N using a special analysis program. The test result is shown in the right of Figure 6. As a result the maximum deformation was 3.5mm when 4000N was loaded. This is sufficient to apply to real design of bed.
EXPERIMENTS
Figure 9: Measured body position by 3D motion capture system.
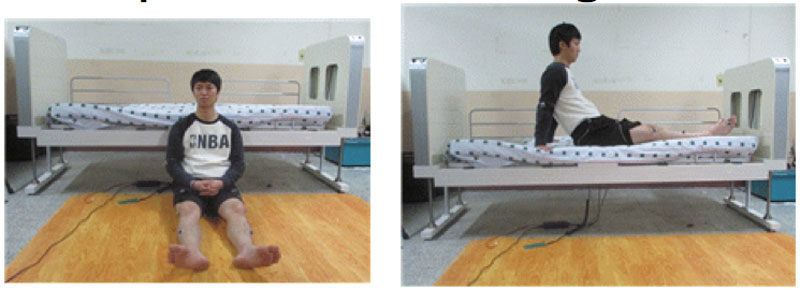
Figure 4 shows a 3D design of low-floor care-bed developed in this study. The main frame is assembled in a fixation hole fabricated in the height adjustable mechanism so that the main frame is fixed without sway. We developed a prototype low-floor care-bed shown in the right of Figure 4. Then a usability test using the prototype bed was performed to compare with a conventional care-bed. Figure 7 shows the experimental configuration with eight 3D motion capture cameras. The initial position of user is on the floor and reflection markers are attached on the user’s body joint including neck.
Usability Tests
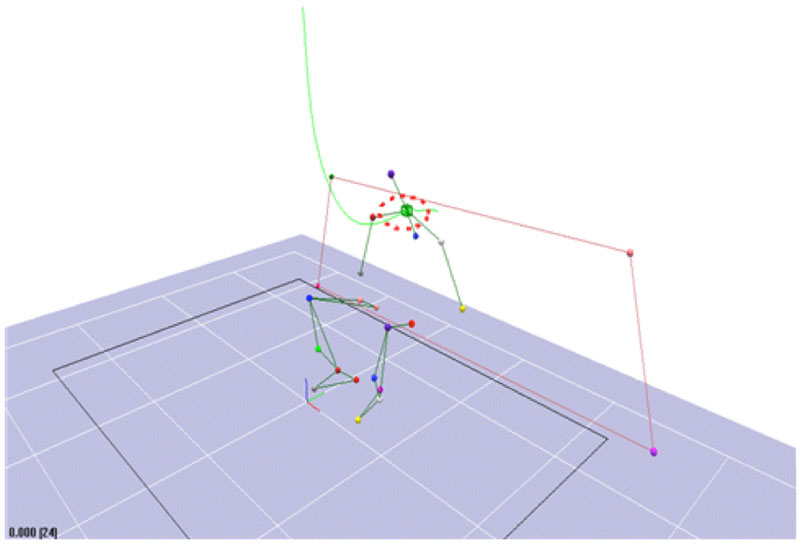
Figure 10: Tracked neck position.
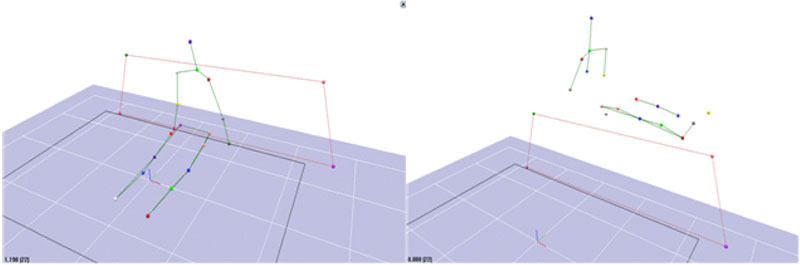
To compare the usability, the height of low-floor care-bed is set to low position, 240mm, but the conventional bed is set to a conventional height, 600mm. When a subject goes up to bed as shown in Figure 9, each joints are measured by 3D motion capture system. Five healthy subjects (24.4±0.5 yrs. 172.2 ±1.3 cm, 67.8±10.5 kg) participated in this experiment.
Results
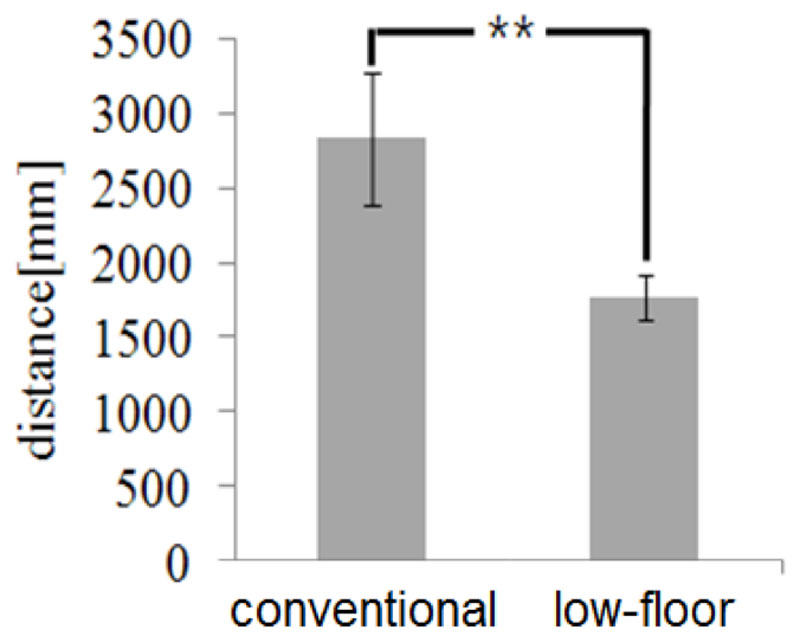
Figure 11: Test results (** : p<0.001).
Figure 9 shows a measured upper body position by the 3D motion capture system. We tracked the trajectory of neck position shown in the dashed line in the Figure 10, and obtained the moving distance of the position on the trajectory. Then we analyzed whole data of five subjects. First the average of moving distance in conventional bed was 2828.7±438.0mm, but the distance in low-floor bed showed lower average than the conventional bed as 1767.5±144.5mm. Then we verified a significant efficiency by ANOVA test. Figure 11 shows the result of ANOVA test that the p-value is less than 0.001. Consequently we can conclude the low-floor care-bed reduces body burden in real use.
CONCLUSIONS
In this study we proposed a low-floor care-bed to lift down to floor so as to assist activities of daily living. First we developed a model for mechanical design. Then design parameters for back-rest and leg-rest actuation were obtained by an optimal method with some conditions. Finally a prototype low-floor care-bed was developed based on the optimized parameters. Using the prototype bed, a usability test was performed with five subjects. The experimental results showed the low-floor care-bed needs for less burden and more comfortable to go to bed from floor. To verify effectiveness in real use is the future work.
REFERENCES
[1] I. Moon, J.H. Bae, J.S. Yoo, and B.S. Kim, “A design guideline for mattress support platform of electric adjustable bed based on upper-body slip assessments,” Proc. Annual Conf. RESNA, 2014.
[2] IEC (International Electrotechnical Commission), IEC 60601-2-52:2009. Medical electrical equipment -- Part 2-52: Particular requirements for the basic safety and essential performance of medical beds, 2009.