Hassan A. Karimi
School of Information Sciences, University of Pittsburgh, Pittsburgh, PA, USA
ABSTRACT
Today, unlike car navigation systems that are many and widespread, there are few pedestrian navigation systems, most of which cannot guide users on pedestrian paths (street paths are usually used as close proximity to pedestrian paths), do not contain information on route accessibility for people with disabilities (PWD), and lack of support for individual preferences. To overcome these shortcomings, in particular route accessibility, a personalized accessible navigation service for wheelchair users is developed and discussed in this paper. The navigation service uses pedestrian paths for wayfinding and finds the most accessible route by considering important route criteria to wheelchair users. Furthermore, the service takes individual preferences into account to recommend accessible routes that are personalized. The navigation service is currently available for the University of Pittsburgh’s main campus on any device with a web-browser and Internet connection.
INTRODUCTION
 (a)
(a)
 (b)
(b)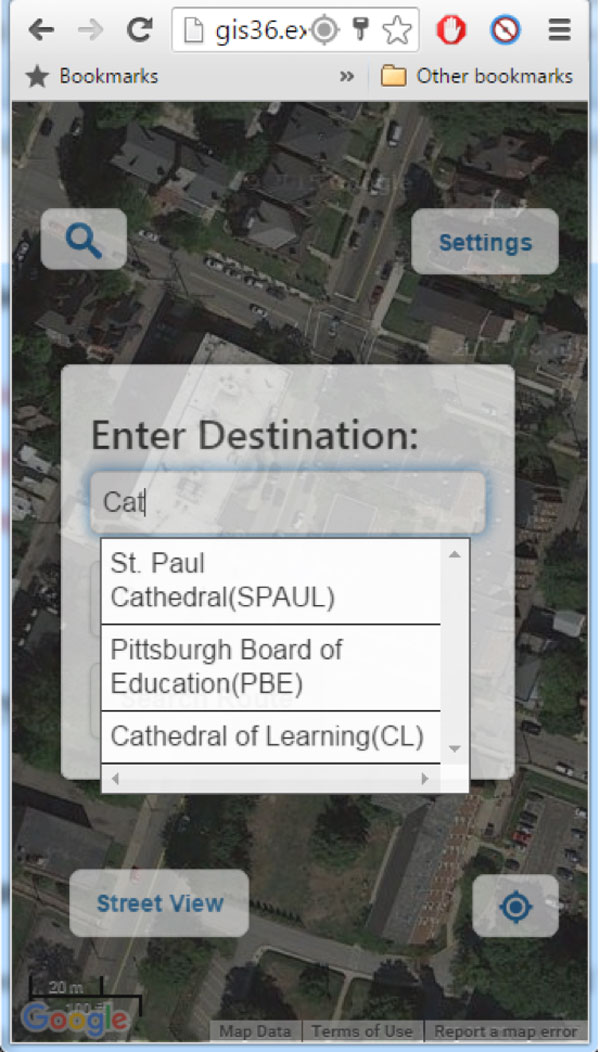 (c)
(c)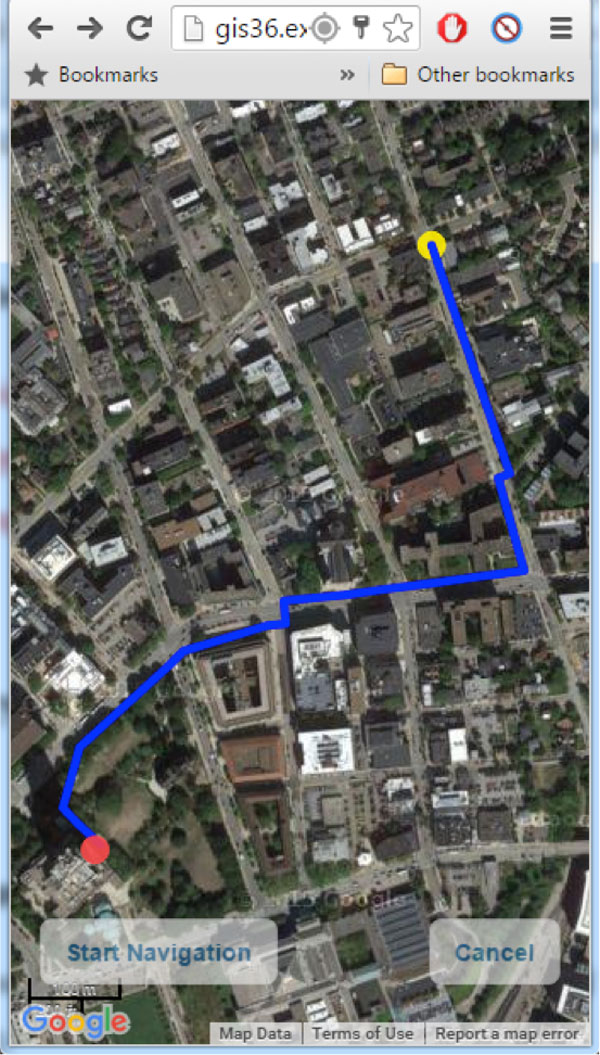 (d)
(d)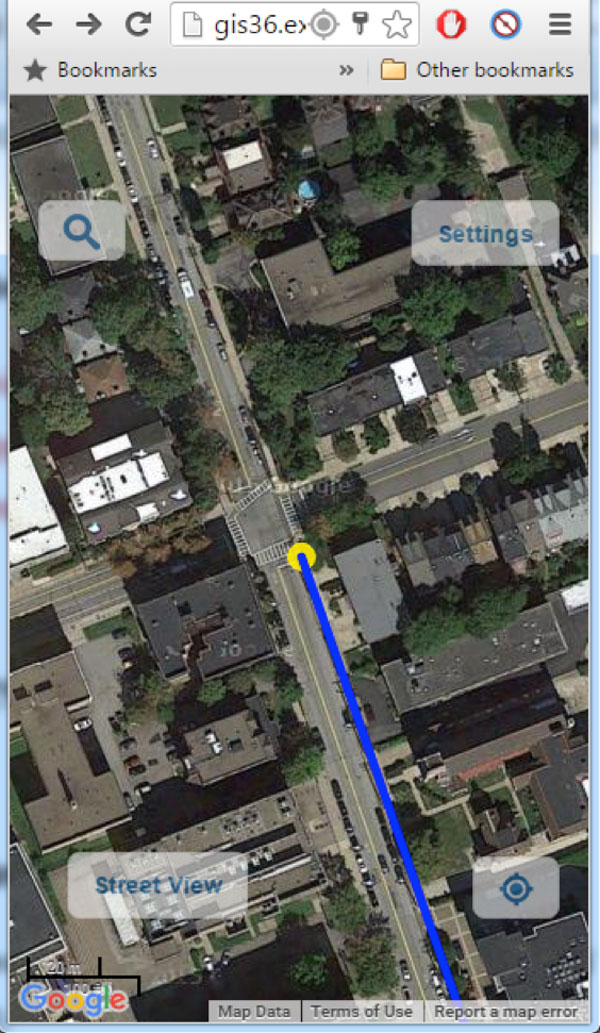 (e)
(e)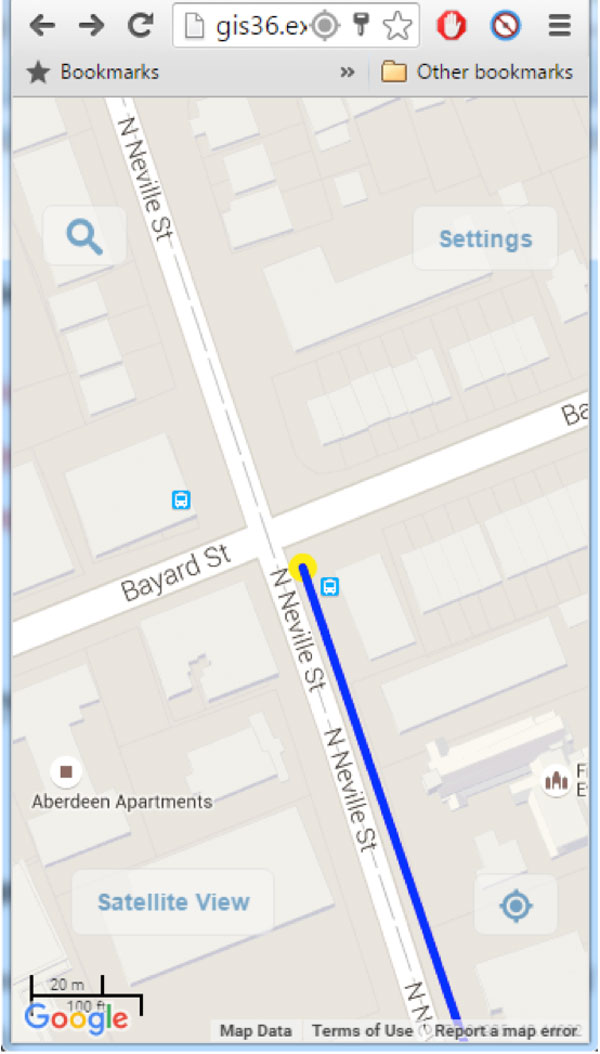
(f)
Current pedestrian navigation systems usually provide navigational assistance to users along the shortest or fastest route (Kasemsuppakorn et al., 2014) and have three major shortcomings: (1) they provide pedestrians with navigational assistance on street paths, as close proximity to pedestrian paths; (2) they are one-size-fits-all in that they do not consider individual physical limitations of pedestrians; and (3) they do not take into account individual preferences of travelers. Our navigation service, currently a prototype in the University of Pittsburgh’s main campus, is different in that it uses the pedestrian network instead of the road network, it contains accessibility-related information about sidewalks which are used to find the most accessible route instead of the shortest route, and finally the routes are personalized based on user’s preferences.
Section 2 provides a review of similar navigation systems in the literature. Sections 3-7 discuss different components of our navigation service in detail. Section 8 provides a summary of the paper and future research.
BACKGROUND
Many studies use the shortest route to navigate wheelchair users toward their destination in indoor (Taha et al., 2008) or outdoor environments (Imamura et al., 2004). Hashemi and Karimi (2016) investigated suitable indoor wayfinding parameters for PWD based on the Americans with Disabilities (ADA) standards (Department of Justice, 2010). Ding et al. (2007) and Kasemsuppakorn and Karimi (2008) determined such ADA-compliant parameters for outdoor wayfinding. However, identifying these parameters is the first step toward developing wayfinding systems for wheelchair users. Holone et al. (2007) proposed a crowdsourced pedestrian wayfinding service for PWD. They used the rates given by previous users to find the most accessible route for future users. Völkel and Weber (2008) also developed the prototype of a service where people can rate the routes they have taken. These rates can later be used to find the best route. However, these systems require many people to rate routes with a sufficient reliability before they can be effective. Alternatively, wayfinding approaches that do not rely on people taking and rating routes have been developed, most relevant of which are reviewed below.
Karimanzira et al. (2006) developed a wayfinding service for visual/limb/hearing impaired people. To find the most accessible route, they considered the effort required to pass the barriers on the route. However, they do not differentiate among different groups of PWD (e.g., wheelchair users and visually impaired) when finding the most optimal route. Sobek and Miller (2006) developed a wayfinding service which renders the most accessible route to three groups of people: able-bodied people; people who use crutch, cane or walker; and wheelchair users. The users must select which group they belong to in order to get the route. Distance is the only criterion they considered to find the best route after pruning inaccessible parts of the sidewalk network for each group. Beale et al. (2006) developed a wayfinding service for wheelchair users where the most accessible route is obtained based on six criteria: length, number of barriers, slope, surface condition, number of crossings, and whether the crossings have traffic signal or not. Although this wayfinding approach considers more criteria, it does not take into account individual preferences of each user and it does not navigate the user.
Our navigation service is different than those above since it continuously tracks the user, updates the route, and provides the user with real-time directions and considers both accessibility and personal preferences of each user in wayfinding. The navigation service can be accessed through any device with a web-browser and Internet connection.
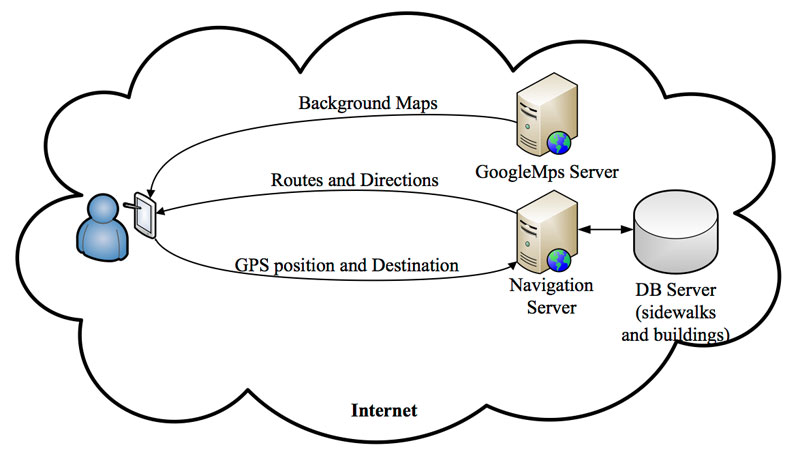
ARCHITECTURE AND COMPONENTS
DATABASE
Road networks cannot be used for pedestrian navigation services for a number of reasons. One reason is that in road networks the side of the road on which the pedestrian is travelling cannot be determined (this is due to the fact that road network databases usually contain road centerlines). Another reasons is that some segments of pedestrian networks cross roads or do not lie on sides of roads. Another important reason is that road network databases widely used in navigation systems do not contain important parameters, such as accessibility, that are essential for wheelchair users. For such reasons, sidewalk networks are needed for pedestrian navigation and a sidewalk network database, developed by Kasemsuppakorn and Karimi (2008), of the University of Pittsburgh’s main campus is used in our service. The database includes the topology of the pedestrian network in a graph of nodes and segments. For the geomtry of the network, the coordinates of nodes and segments are stored. Accessibility attributes on segments include distance, width, slope, elevation changes, surface condition, and human traffic. These attributes are stored in a separate table and linked to the graph through segment IDs. Fig. 2 shows the accessible pedestrian network overlaid on Google Maps.

ROUTING
In our previous work, we developed a personalized routing suitable for wheelchair users (Kasemsuppakorn and Karimi, 2009) where we considered six criteria to find the most accessible route: width, distance, slope, surface condition, elevation change, and sidewalk traffic. In a follow up work, we tested the personalized routing by using wheelchair users (Kasemsuppakorn et al., 2014). The routing criteria we used were based on the ADA standards (Department of Justice, 2010) and the results of survey and similar woks published in literatures. We developed a fuzzy inference system to determine an impedance level for each segment in the network based on a value for each aforementioned criterion. A personalized route is provided to a user once the user enters a weight for each of these six criteria. Each weight determines each criterion’s contribution in the segment’s impedance level. We implemented this personalized routing in our navigation service by allowing users to register and determine those weights by answering fifteen questions. The answers to these questions are then entered to an analytic hierarchy process (AHP) (Saaty, 1990) which in turn generates the weights. Fig. 3 shows two examples of these questions. The answers to these questions are stored in the database and retrieved each time the user logs in and the user can change these settings at any time.
1. slope is ______ than steps
2. slope is ____ than width
MAP MATCHING
Accurate and continuous guidance requires real-time positioning of the user. While GPS can position the user outdoors, the observed positions are with errors caused by receivers (e.g., time offset) and environmental effects (e.g., ionosphere), among other factors. Since wheelchair users travel on sidewalks which are close to buildings and trees, the position of the user obtained from GPS is highly erroneous. Therefore, GPS observed positions may not be exactly the segment on which the user is travelling and sometimes even closer to other segments. As providing routes and directions require that the user’s location be exactly on the correct segment in the pedestrian network, using only raw GPS observed positions with these errors is not suitable.
Map-matching algorithms which find the correct travelling segment and estimate best GPS positions on it are appropriate for navigation (Hashemi and Karimi, 2014). While there are several different map-matching algorithms for car navigation, there are just a few for pedestrian navigation. In our previous works, we developed different map-matching algorithms for wheelchair navigation on pedestrian networks (Ren and Karimi, 2009a; 2009b; 2012). Of these, we implemnted the chain-coding map-matching algorithm (Ren and Karimi, 2009a), which finds the correct segment based on the position and direction of movement, constrained by connectivity among seuqnetial segments, in our navigation service.
USER-INTERFACE
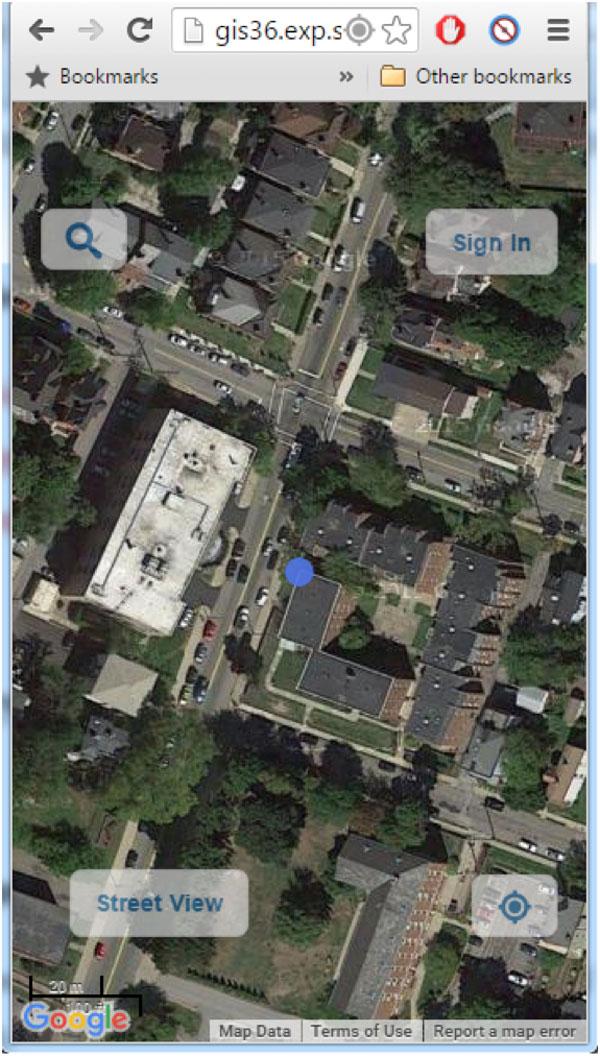
The user-interface for our navigation service is also designed based on the Achecker accessibility standards (http://www.atutor.ca/achecker/demo.php). Fig. 4 shows different pages of our navigation service.
Figure 4 (a) is the page users see when they first open the web-service; the blue point shows the user’s location. The user needs to sign in or register as a new user to be provided with a personalized route. Figure 4 (b) shows the user-interface after signing in where users can set their preferences by clicking on the “settings” button. Clicking on the “magnifier” button allows the user to enter a destination, shown in Figure 4 (c). The auto-completion feature of the text box allows the user to select a destination from the provided options as the address is being typed. Figure 4 (d) shows the retrieved route which is both accessible and personalized. To invoke the navigation mode, shown in Figure 4 (e), the user needs to click on the “Start Navigation” button. In this mode, the user’s location, the route, and the map’s center update as the user moves. For example, if the user deviates from the original route, the service automatically updates the route and puts the user on a new track. Finally, the user can switch the background to street view, shown in Figure 4 (f), by clicking on the corresponding button and go back to the previous background by clicking on the “Satellite View” button.
SUMMARY AND FUTURE RESEARCH
A prototype navigation service that uses accessibility of the built outdoor environments, to provide accessible routes and real-time guidance on them to wheelchair users, is presented. The navigation service features a GPS-based map-matching algorithm and the accessible routes it recommends are personalized addressing individual travel needs and preferences.
Our future research includes testing the prototype navigation service by subjects who use wheelchairs for mobility and using the accessible pedestrian network of the University of Pittsburgh’s main campus.REFERENCES
Beale, L., Field, K., Briggs, D., Picton, P., & Matthews, H. (2006). Mapping for wheelchair users: Route navigation in urban spaces. The Cartographic Journal , 43 (1), 68-81.
Department of Justice. (2010). ADA standards for accessible design. USA.
Ding, D., Parmanto, B., Karimi, H. A., Roongpiboonsopit, D., Pramana, G., Conahan, T., et al. (2007). Design considerations for a personalized wheelchair navigation system. In Proceedings of 29th Annual International Conference on Engineering in Medicine and Biology Society (pp. 4790-4793). Lyon, France: IEEE.
Hashemi, M., & Karimi, H. A. (2014). A critical review of real-time map-matching algorithms: Current issues and future directions. Computers, Environment and Urban Systems , 48, 153-165.
Hashemi, M., & Karimi, H. A. (2016). An indoor spatial model and accessibility index for emergency evacuation of people with disabilities. Journal of Computing in Civil Engineering .
Holone, H., Misund, G., & Holmstedt, H. (2007). Users are doing it for themselves: Pedestrian navigation with user generated content. International Conference On Next Generation Mobile Applications, Services and Technologies (pp. 91-99). Cardiff, UK: IEEE.
Imamura, M., Tomitaka, R., Miyazaki, Y., Kobayashi, K., & Watanabe, K. (2004). Outdoor waypoint navigation for an intelligent wheelchair using Differential GPS and INS. In Proceedings of SICE 2004 Annual Conference. 3, pp. 2193-2196. IEEE.
Karimanzira, D., Otto, P., & Wernstedt, J. (2006). Application of machine learning methods to route planning and navigation for disabled people. The 25th IASTED International Conference on Modeling, indentification, and control, (pp. 366-371). Lanzarote, Canary islands, Spain.
Kasemsuppakorn, P., & Karimi, H. A. (2008). Data requirements and a spatial database for personalized wheelchair navigation. In Proceedings of the 2nd international convention on rehabilitation engineering & assistive technology (pp. 31-34). Singapore Therapeutic, Assistive & Rehabilitative Technologies (START) Centre.
Kasemsuppakorn, P., & Karimi, H. A. (2009). Personalised routing for wheelchair navigation. Journal of Location Based Services , 3 (1), 24-54.
Kasemsuppakorn, P., Karimi, H. A., Ding, D., & Ojeda, M. A. (2014). Understanding route choices for wheelchair navigation. Disability and Rehabilitation: Assistive Technology , 10 (3), 198-210.
Kilkens, O. J., Post, M. W., Dallmeijer, A. J., Seelen, H. A., & van der Woude, L. H. (2003). Wheelchair skills tests: a systematic review. Clinical Rehabilitation , 17 (4), 418-430.
Meyers, A. R., Anderson, J. J., Miller, D. R., Shipp, K., & Hoenig, H. (2002). Barriers, facilitators, and access for wheelchair users: sbstantive and methodologic lessons from a pilot study of environmental effects. Social Science & Medicine , 55 (8), 1435-1446.
Ren, M., & Karimi, H. A. (2009a). A chain‐code‐based map matching algorithm for wheelchair navigation. Transactions in GIS , 13 (2), 197-214.
Ren, M., & Karimi, H. A. (2009b). A Hidden Markov Model Map Matching Algorithm for Wheelchair Navigation. The Journal of Navigation, 62 (3), 383-395.
Ren, M., & Karimi, H. A. (2012). A Fuzzy Logic Map Matching for Wheelchair Navigation. GPS Solutions, 16 (3), 273-282.
Saaty, T. L. (1990). How to make a decision: the analytic hierarchy process. European journal of operational research , 48 (1), 9-26.
Sobek, A. D., & Miller, H. J. (2006). U-Access: a web-based system for routing pedestrians of differing abilities. Journal of Geographical Systems , 8 (3), 269-287.
Taha, T., Miró, J. V., & Dissanayake, G. (2008). POMDP-based long-term user intention prediction for wheelchair navigation. In Proceedings of IEEE International Conference on Robotics and Automation, (pp. 3920-3925).
Völkel, T., & Weber, G. (2008). RouteCheckr: personalized multicriteria routing for mobility impaired pedestrians. In Proceedings of the 10th international ACM SIGACCESS conference on Computers and accessibility (pp. 185-192). Halifax, Nova Scotia, Canada: ACM.
Völkel, T., Kühn, R., & Weber, G. (2008). Mobility impaired pedestrians are not cars: Requirements for the annotation of geographical data. Berlin Heidelberg: Springer.
ACKNOWLEDGEMENT
This work was financially supported by the Paralyzed Veterans of America (PVA) Research Foundation, Grant #3030. The author acknowledges the help of Mr. Er Wang and Mr. Mahdi Hashemi in developing the service.