Nuno Oliveiraa,c, Sheila Blochlingerb, Naphtaly Ehrenberga,c, Theresa Defosseb, Gail Forrestc, Trevor Dyson-Hudsond, Peter Barrancea,c
aResearch Department, bRehabilitation Technology Dept.; Children Specialized Hospital, Mountainside, NJ
cHuman Performance and Engineering, dSpinal Cord Injury Research; Kessler Foundation, West Orange, NJ
ABSTRACT
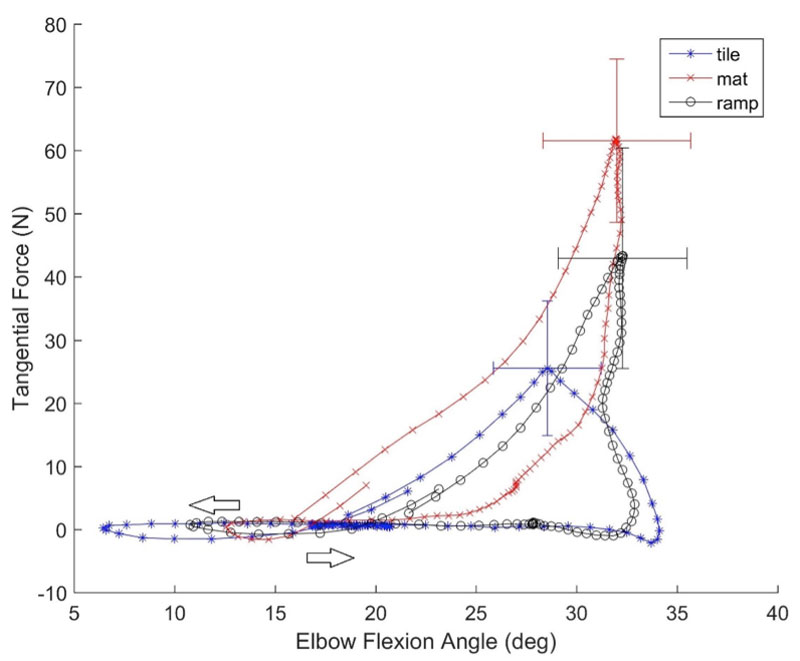
Understanding manual wheelchair propulsion kinematics and associated pushrim forces is essential to develop strategies directed to minimize or prevent injury risk and maximize mobility in persons who use manual wheelchairs. A 16 year old individual who used a manual wheelchair as his primary means of mobility was tested propelling an ultralight wheelchair under three different conditions: across a level tiled floor, across a thick mat intended to simulate wheeling over ground, and ascending an ADA approved (5 degree) ramp. Upper body kinematics and pushrim force data were recorded simultaneously using an instrumented pushrim system synchronized with a wireless kinematic measurement technology. The relationships between elbow flexion and pushrim tangential force were examined, and different propulsive patterns were observed between conditions. Compared with wheeling on level ground, higher peak forces were recorded when traversing the mat and ascending the ramp. For wheeling on level floor, peak propulsive force occurred at lower elbow flexion angles and later in the stroke cycle. The ability to observe differences in the synchronized patterns using the wireless system was demonstrated, and the influence of range of motion deficits in clinical populations is discussed.
BACKGROUND
A common problem among individuals who use manual wheelchairs is the occurrence of upper limb injuries due to the increased loading and overuse resulting from long periods of manual wheelchair activity (Gellman et al. 1988, Boninger et al. 2003, Mercer et al. 2006).The repetition of propulsive motion patterns has been shown to predispose the user to soft tissue disorders (Finley et al. 2004) that can result in high prevalence of shoulder, elbow and wrist injuries (Subbarao et al. 1995, Ballinger et al. 2000, Boninger et al. 2003), as well as neck pain (Boninger et al. 2003, Lee Kirby et al. 2004).
Daily wheelchair propulsion can take place on many surface types with different propulsive demands that require biomechanical adaptations from the user. Most studies investigating wheelchair propulsion biomechanics are conducted on level floor, leaving wheelchair propulsion in other terrain types (ramp, grass, carpeted floor) poorly understood. Some authors (Richter et al. 2007, Cowan et al. 2009) investigated wheelchair propulsion over different surfaces (tile, low carpet, high carpet, interlocking concrete paving stones, smooth level concrete, grass, hardwood flooring) and slopes (3°, 6°, 5°, 8% grade) and concluded pushrim forces and stroke count increased with rolling surface resistance or inclination. Although these studies reported important information about the force patterns involved in wheelchair propulsion on different surfaces and slopes, providing information on the user’s kinematics and corresponding force outcome is important to understand the implications surface type has on upper limb biomechanics. This paper introduces a wireless data collection system that synchronizes upper body kinematics and pushrim forces. This system synchronizes wireless Inertial Measurement Units (IMU) for kinematic data collection with kinetic data from a wireless instrumented pushrim. The purpose of this study was to evaluate the feasibility of using this system to measure synchronized elbow flexion angle (ELflx) and pushrim tangential force (Ft) patterns during manual wheelchair propulsion, and to compare the FT/ELflx patterns under three different rolling conditions: across a level tiled floor, across a thick mat intended to simulate wheeling over ground, and ascending an ADA approved (5 degree) ramp.
METHODS
A 16 year old male (79Kg, 175cm) with cerebral palsy participated in this study. The participant presented spastic diplegia and was primarily a manual wheelchair user. Contractures that limited active and passive upper limb ranges of motion were present. All research procedures were approved by the Institution IRB and an informed consent form was cosigned by the participant and parent. Inclusion criteria for the study included: 1) use of a wheelchair as primary means of mobility, 2) more than one year of manual wheelchair experience, and 3) ability to propel a manual wheelchair for at least 20 minutes at a self-selected speed.
An instrumented pushrim wheel (SmartWheel, Outfront, Mesa, AZ), with a solid treaded tire, was placed on the right side of the study wheelchair to collect kinetic data. Data were sampled at 240Hz. A non-instrumented wheel supplied with the SmartWheel system was placed on the left side. Tangential force (Ft) was calculated following a method for calculation of pushrim forces reported by Robertson et al. (1996).
IMUs (Xsens MVN Biomech, Enschede, The Netherlands) were used to collect upper body kinematic data (60Hz). 11 sensors were fixed to the participant on the following segments and segment regions: head, sternum, sacrum, right scapula, left scapula, right upper arm, left upper arm, right forearm, left forearm, right hand and left hand. Elastic straps, a tight Lycra suit top and gloves were used to fix the sensors to the selected anatomic landmark.
For kinematic calibration, the participant was seated on a wooden chair and asked to adopt a ‘T’ posture with arms at shoulder height, elbows extended, and palms down. Due to upper extremity contractures associated with cerebral palsy, manual assistance in completing this task was offered and accepted. However, passive extension deficit required that elbow flexion (15-20° per visual approximation) remained.An additional IMU sensor was attached to the wheelchair frame to be used as an event tracker (i.e. to determine when the participant started moving on the mat or up the ramp) by calculating the vertical acceleration when crossing the mat, and the inclination angle when going up the ramp. Synchronization of the instrumented pushrim and IMUs data collection systems was achieved by a hardwired connection between the two systems, with the IMUs configured to start and stop recording on high and low voltages provided by the pushrim system. The IMU’s signal was interpolated to match the 240Hz sampling rate of the instrumented pushrim.
The participant was instructed to propel an ultralight wheelchair (Tilite ZRA, Pasco, WA) starting from a stationary position, at self-selected speed, in three different conditions. The three conditions were: (1) level tiled floor, (2) a 8.9cm thickness polyfoam mat (1.5m x 2.2m) used to simulate wheeling outdoors over ground, and (3) a 5.8m tile floored ramp (maximum slope of 5° for 1.2m) compliant with the Americans with Disabilities Act. The flooring surface in conditions (1) and (3) were the same. To assist the transition onto the mat from the tile floor, a short aluminum threshold ramp was attached to the mat.
Order of test conditions was randomly selected beforehand. The wheelchair was set up and adjusted specifically to the participant by a certified assistive technology professional. Before testing, the participant was allowed a five minute adaptation period to the chair where he could move freely.
Three trials were completed for each condition. 17 propulsive cycles were analyzed for the level floor tile condition (‘tile’), 16 propulsive cycles during propulsion on the mat were analyzed (‘mat’), and 26 propulsive cycles during propulsion on the ramp were analyzed (‘ramp’). A cycle was defined as the period between two samples where Ft dropped below the 4N threshold. This was approximate to the pushrim release in the cycle. Cycle duration was normalized into percentiles corresponding to 101 samples. A representative cycle consisting of an average across the total number of trials was calculated for each condition. Ftpk is the maximum Ft during the cycle.
RESULTS
DISCUSSION
In our literature review only one study that investigated upper body kinematics synchronized with pushrim forces during manual wheelchair propulsion was found (Slavens et al. 2015). Although this study provided important information about the biomechanics of manual wheelchair propulsion, it employed an optical marker-based system for kinematic data collection. Such systems may be best suited to testing in the laboratory setting, whereas the purpose of the current study was to evaluate the feasibility of a highly portable and self-contained wireless system to observe FT/ELflx patterns in three different rolling conditions.
Several aspects of the study results for one individual were similar to those reported in previous studies. First, the higher Ftpk for the mat and ramp conditions compared with tile observed in this study are similar to observations on peak wheel torque reported by Koontz et al. (2005). Second, as related to the FT/ELflx relationship, while Ftpk for ‘mat’ and ‘ramp’ were observed near maximum elbow flexion, Ftpk for ‘tile’ occurred during elbow extension. This pattern has been associated with a smooth low cadence propulsive motion which is recommended for injury prevention (Collinger et al. 2008). We also observed a larger range of motion for elbow flexion in the ‘tile’ condition compared with the conditions that required more propulsive effort, although we did not find any previous reports on such comparisons.
The elbow flexion angles recorded were lower than those reported in other studies (Goins et al. 2011). The participant in our study had upper limb spasticity secondary to cerebral palsy that restricted his elbow extension and impacted his ability to assume a required neutral calibration position. The IMU system zeroes the joint angle measurements in the calibration position, and a systematic error in which elbow flexion measurements read lower than true values is therefore expected. This effect may explain the lower absolute elbow flexion angle measurements observed in our study.
This study introduces a method to synchronize pushrim forces with upper body kinematics using a fully portable wireless data collection system. An ongoing study is using this system to assess the impact of differences in wheelchair type and weight in the three test conditions above. We believe that this system holds the promise of allowing future studies in environments where synchronized kinematic measurements using other technologies may be impractical or impossible. Future development work should be directed at addressing a methodological limitation as highlighted in the study: kinematic results can be influenced by passive range of motion deficits in people with spasticity. This has not prevented our ability to observe differences in our within-subjects study design. Different options for calibration poses, such as those in which joints are flexed, may make this technology even more effective for the study of wheeled mobility in disabled populations.
REFERENCES
Ballinger, D. A., Rintala, D. H., & Hart, K. A. (2000). The relation of shoulder pain and range-of-motion problems to functional limitations, disability, and perceived health of men with spinal cord injury: a multifaceted longitudinal study. Archives of Physical Medicine and Rehabilitation, 81(12), 1575-1581.
Boninger, M. L., Cooper, R. A., Fitzgerald, S. G., Lin, J., Cooper, R., Dicianno, B., & Liu, B. (2003). Investigating neck pain in wheelchair users. American Journal of Physical Medicine & Rehabilitation, 82, 197-202.
Boninger, M. L., Dicianno, B. E., Cooper, R. A., Towers, J. D., Koontz, A. M., & Souza, A. L. (2003). Shoulder magnetic resonance imaging abnormalities, wheelchair propulsion, and gender. Archives of Physical Medicine and Rehabilitation, 84, 1615-1620.
Collinger, J. L., Boninger, M. L., Koontz, A. M. Price, R., Sisto, S. A., Tolerico M. L., & Cooper, R. A. (2008). Shoulder biomechanics during the push phase of wheelchair propulsion: a multisite study of persons with paraplegia. Archives of Physical Medicine and Rehabilitation, 89, 667-676.
Cowan, R. E., Nash, M. S., Collinger, J. L., Koontz, A. M., & Boninger, M. L. (2009). Impact of surface type, wheelchair weight, and axle position on wheelchair propulsion by novice older adults. Archives of Physical Medicine and Rehabilitation, 90, 1076-1083.
Finley, M. A., Rasch, E. K., Keyser, R. E., & Rodgers, M. M. (2004). The biomechanics of wheelchair propulsion in individuals with and without upper-limb impairment. Journal of Rehabilitation Research and Development, 41, 385.
Gellman, H., Sib, I., & Waters, R. L. (1988). Late complications of the weight-bearing upper extremity in the paraplegic patient. Clinical Orthopaedics and Related Research, 233, 132-135.
Goins, A. M., Morgan, K., Stephens, C. L., & Engsberg, J. R. (2011). Elbow kinematics during overground manual wheelchair propulsion in individuals with tetraplegia. Disability and Rehabilitation: Assistive Technology, 6, 312-319.
Koontz, A. M., Cooper R. A., Boninger M. L., & Yang, Y. (2005). A kinetic analysis of manual wheelchair propulsion during start-up on select indoor and outdoor surfaces. Journal of Rehabilitation Research and Development, 42, 447.
Lee Kirby, R., Fahie, C. L., Smith, C., Chester, E. L., & Macleod, D. A. (2004). Neck discomfort of wheelchair users: effect of neck position. Disability and Rehabilitation, 26, 9-15.
Mercer, J. L., Boninger, M., Koontz, A., Ren, D., Dyson-Hudson, T., & Cooper, R. (2006). Shoulder joint kinetics and pathology in manual wheelchair users. Clinical Biomechanics, 21, 781-789.
Richter, W. M., Rodriguez, R., Woods K. R., & Axelson, P. W. (2007). Stroke pattern and handrim biomechanics for level and uphill wheelchair propulsion at self-selected speeds. Archives of Physical Medicine and Rehabilitation, 88, 81-87.
Robertson, R. N., Boninger, M. L., Cooper, R. A., & Shimada, S. D. (1996). Pushrim forces and joint kinetics during wheelchair propulsion. Archives of Physical Medicine and Rehabilitation, 77, 856-864.
Slavens, B. A., Schnorenberg, A. J., Aurit, C. M., Graf, A., Krzak, J. J., Reiners, K., Vogel, L. C., & Harris, G. F. (2015). Evaluation of pediatric manual wheelchair mobility using advanced biomechanical methods. BioMed Research International 2015.
Subbarao, J., Klopfstein, J., & Turpin, R. (1995). Prevalence and impact of wrist and shoulder pain in patients with spinal cord injury. The Journal of Spinal Cord Medicine, 18(1), 9-13.