Lina Becerra1, Alejandra Ruiz2, Heather Capel1, Kim Adams1
1University of Alberta, Edmonton, Alberta, Canada
2University of Guadalajara, Guadalajara, MexicoABSTRACT
Haptic exploration occurs when people manipulate objects and use their sense of touch to determine the physical properties of objects and is dependent on specific hand movements (Klatzky, Lederman, & Manikinen, 2005). For this reason, it may be difficult for children with physical disabilities, who have limited hand control, to learn about object properties through haptic exploration. They may, however, use different anatomical sites (i.e. head, arms or feet) to control assistive technology. Robotic haptic teleoperation systems allow manipulation and sensation of objects at a distance through an effector. These systems may allow children with physical disabilities to perform haptic exploration and learn about weight, texture, rigidity, hardness and size of objects. This cross over pilot study aimed to examine the effects of using a low tech device, resembling a robotic end effector, to explore how four typically developing children and five adults used different anatomical sites to explore object properties and make perceptual comparisons. Results showed that haptic systems could be useful to children with physical disabilities. These results can inform future studies and haptic systems development so that the experiences of children with physical disabilities using assistive technology can be enhanced.
BACKGROUND
Children perform haptic exploration to investigate the sensory feedback of objects in order to learn and create predictions about the world around them
(Gibson, 1988). When children perform haptic exploration, they use specialized hand movements or exploratory procedures (EPs) (Klatzky, Lederman, & Manikinen, 2005). Children as young as 4 are able to make perceptual comparisons about objects (e.g., which object is harder) and use appropriate EPs dependent on the task goal; for example, they lift objects to judge weight or press objects to judge hardness (Klatzky, Lederman, & Manikinen, 2005). The more appropriate EPs children perform the better their performance determining object properties (Kalagher, 2015). Some EPs children use are listed below (Klatzky, Lederman, & Manikinen, 2005):
- Lateral Motion: Repetitive lateral rubbing motion to determine texture
- Pressure: Pressure applied to objects’ surface to determine hardness.
- Enclosure: Molding of the palm and/or finger(s) to the contours of an object to determine shape and volume.
- Static Contact: Stationary contact on a surface to determine temperature
- Unsupported Holding: Lifting an object away from a supporting surface to determine weight.
- Contour Following: Edge following to obtain spatial details about shape.
Robotic systems have been shown to facilitate object manipulation allowing children to explore and play. A switch-controlled robotic arm provided visual and auditory feedback to children when they explored, allowing them to learn about the consequences of their actions over objects (Cook, Howery, Gu, & Meng, 2000). Robotic haptic teleoperation systems allow manipulation and sensation of objects (Jafari, Adams, & Tavakoli, 2016). Using these systems, children with physical disabilities could control the robotic end effector to manipulate objects and learn about object properties.

PURPOSE
- Determine if participants are accurate making perceptual comparisons when they perform haptic exploration using an effector at various anatomical sites.
- Determine the EPs participants perform during haptic exploration when they use an effector at various anatomical sites.
METHODS
Design
Participants
Four typically developing children between the ages of 5 and 6 and five adults participated in the study. All participants had no known physical, cognitive, visual or hearing impairments.
Materials
A low tech effector was used which resembled the end effector of a robot, and participants used their foot, elbow, or hand (see figure 1). When participants used their head they were fitted with a mechanical head pointer.
The five object pairs were: 1) two canisters, one filled with coins and the other empty, for weight 2) sand paper and smooth plastic for roughness 3) foam and a block of wood for hardness 4) a hollow ring and a square for shape and 5) a 3x3 cm and a 6x6 cm hollow square for size.
Procedures
Participants were blindfolded and music was played so that they could not hear the sound the effector made when it touched the objects.
The researcher placed each object in front of the participant and guided the participant's anatomical site until he/she was touching the object with the effector. Participants were given a maximum of 10 seconds to feel each object. After both objects in each pair were presented the participant was asked which item was greater on the given dimension (larger, harder, etc.). For the shape pair, participants were asked which item was more like a circle. The participant answered either “the first” or “the second” object.
RESULTS
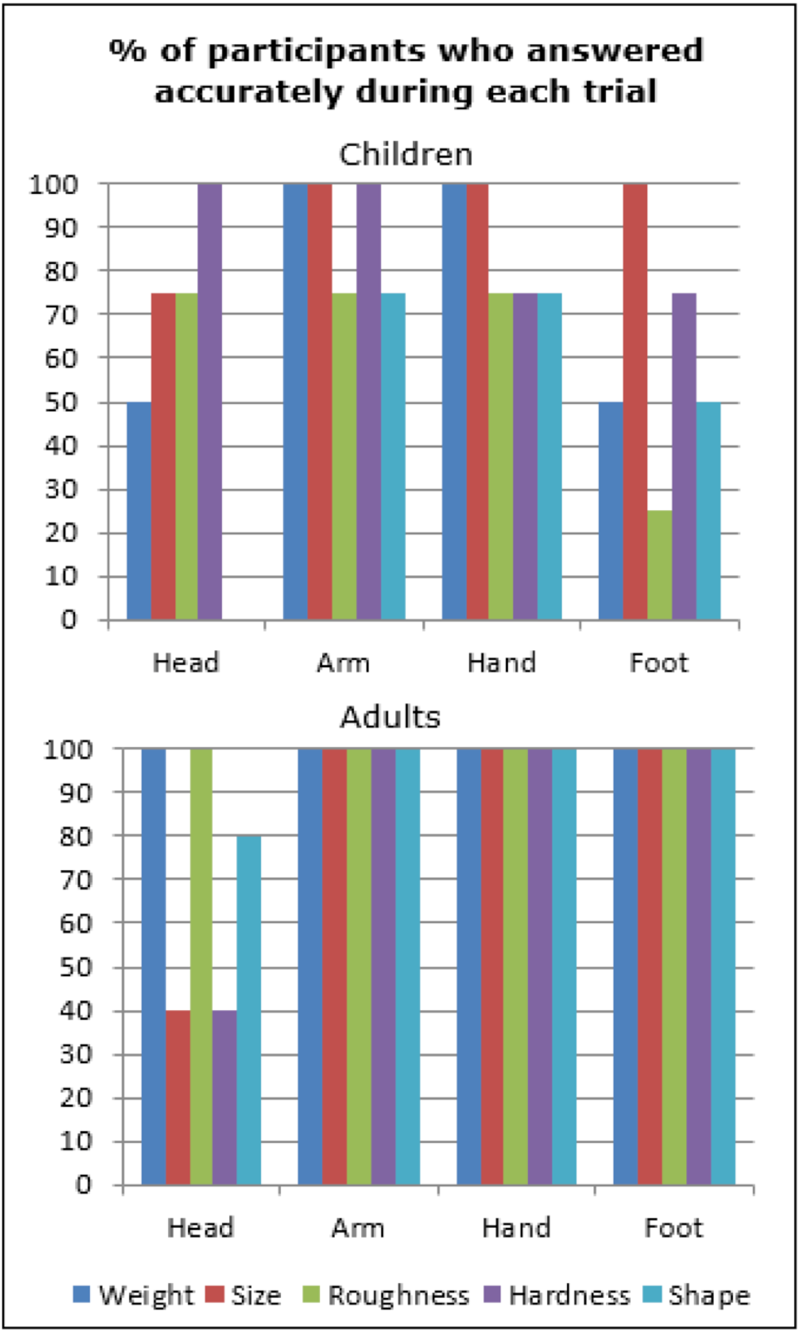
Figure 2 shows the accuracy with which participants identified the objects that were greater on each dimension. Each bar represents the percentage of participants who answered correctly for each object pair using each anatomical site.
A coding system based Kalagher (2015) and Klatzky, Lederman, & Manikinen (2005) was developed and implemented to code EPs. From video recordings two research assistants coded the frequency with which each EP was performed. After coming to a consensus on the coding, the frequency of each EP was divided by the total of all EP occurrences for each trial. Table 1 shows the proportion (%) of each EP observed during each trial.
|
Head |
Arm |
Hand |
Foot |
Weight |
75% UH 13% LM 12% SC |
100% UH |
89% UH 11% LM |
100% UH |
80% UH 20% LM |
100% UH |
100% UH |
100% UH |
|
Roughness |
86% LM 14% SC |
90% LM 10% CF |
75% LM 25% CF |
75% LM 13%CF 12% SC |
83% LM 17% SC |
100% LM |
100% LM |
100% LM |
|
Hardness |
89% P 11% LM |
75% P 25% LM |
55% P 45% LM |
63% P 25% LM 12% SC |
56% P 44% LM |
73% P 18% LM 9% CF |
67% P 33% LM |
67% P 33% LM |
|
Shape |
40% CF 40% SC 20% LM |
67% CF 33% LM |
100% CF |
71% CF 29% LM |
71% CF 21% LM 8% SC |
91% CF 9% SC |
100% CF |
77% CF 15% LM 8% SC |
|
Size |
86% LM 14% SC |
60% CF 40% LM |
100% CF |
60% CF 20% LM 20% SC |
67% CF 25% LM 8% SC |
75% CF 25% LM |
64% CF 36% LM |
50% LM 42% CF 8% SC |
|
| LM= Lateral Motion; P= Pressure; SC=static contact; UH= Unsupported Holding; CF= Contour Following. The optimum EP for each dimension is in bold. | ||||
DIscussion
Visual analysis of Figure 2 shows that results from the current study differ from Klatzky, Lederman and Mankinen (2005) where 4-year-old children were able to answer all trials without any errors when they used their hands for haptic exploration. Children in the current study made mistakes when they used their hands and an effector for haptic exploration. It may be that information related to roughness and hardness is lost through the effector, making it harder to make perceptual comparisons. Also, accuracy further decreased when children were asked to make perceptual comparisons using different anatomical sites like their head and feet.
Figure 2 shows that adults were 100% accurate using all anatomical sites except their head. These results demonstrate that, with the exception of the head, it is easier for adults to translate the information they receive through the effector (vibration and friction) into information about texture (roughness and hardness), perhaps because they have more experience with objects.
Overall adults and children seemed to perform the optimum EP more frequently for each object pair and anatomical site (Klatzky, Lederman, & Manikinen, 2005). Enclosure is considered the optimum EP for size (Kalagher, 2015) however it was not possible using the effector. Children and adults were able to compensate for this limitation using lateral motion and contour following; these EPs seemed to be highly effective to extract information about size in the given task.
A visual comparison of both Figure 2 and Table 1 shows that when participants performed the optimum EP to a greater proportion, they made more accurate perceptual comparisons. Children did a greater variety of EP’s compared to adults; they also performed less optimum EPs. This could explain why they were less accurate than adults during perceptual comparisons. With the head, adults performed lateral motion for all the object pairs which was not always the optimum EP- this could explain why they were less accurate using this anatomical site.
CONCLUSIONS
For the most part, children and adults were accurate when making perceptual comparisons using different anatomical sites and an effector. They were also able to perform the required EPs to determine each dimension. This study revealed that using diverse effectors to perform haptic exploration could potentially be useful for children with physical disabilities to learn about object properties.
REFERENCES
Chen, Ge, Tang, Zhang, & Chen. (2015). Tactile Perception of Fabrics with artificial Finger compared to Human Sensing. Textile Research Journal, 85(20), 2177-2187.
Cook, A., Howery, K., Gu, J., & Meng, M. (2000). Robot enhanced interaction and learning for children with profound physical disabilities. Technology and Disability, vol 13 pg 1–8.
Gentaz, E. (2003). General Characteristics of the Anatomical and Functional Organization of Cutaneous and haptic Perceptions. In E. Gentaz, Y. Hatwell, & S. Arlette, Touching for knowing. Amsterdam: John Benjamins Publishing Co.
Gibson, E. (1988). Exploratory Behavior: The Development of Perceiving Acting and Acquiring of Knowledge. Annual Rev Psychol, 1-41.
Jafari, N., Adams, K., & Tavakoli, M. (2016). Haptics to improve task performance in people with disabilities: A review of previous studies and a guide to future research with children with disabilities. Journal of Rehabilitation and Assistive Technologies Engineering, Volume 13: 1-13.
Kalagher, H. (2015). Haptic Exploration of Tools: Insight into the processes that drive haptic exploration in preschool-aged children. vol 35 pg 111-121.
Klatzky, R., Lederman, S., & Manikinen, J. (2005). Visual and Haptic exploratory procedures in children's judgements about tool function. Infant Behavior and Development, vol 28 pg 240-249.