Nuno Oliveira a,c, Sheila Blochlinger b, Naphtaly Ehrenberg a,c, Theresa Defosse b, Gail Forrest c, Trevor Dyson-Hudson d, Peter Barrance a,c
a Research Department, b Rehabilitation Technology Dept. Children Specialized Hospital, Mountainside, NJ
c Human Performance and Engineering, d Spinal Cord Injury Research; Kessler Foundation, West Orange, NJ
ABSTRACT
Lightweight (K4) and ultra-lightweight (K5) wheelchairs are commonly used as mobility devices by pediatric manual wheelchair users. In this study, instrumented pushrims and wireless motion tracking were used to measure energy cost and shoulder flexion during manual wheelchair propulsion. Eight pediatric (age=12-18 yrs) manual wheelchair users propelled a K4 and K5 wheelchair across a level tiled floor (“Tile”), over a polyfoam mat (“Mat”), and ascended an ADA approved (5 degree) ramp (“Ramp”). Compared with the K4 wheelchair (mean difference ± standard error), propulsion on the K5 wheelchair required less propulsive work per distance traveled (8.3±1.7 J∙m-1, p=0.002). Maximum shoulder flexion was greater (9.5±2.0°, p=0.003) when propelling the K5 wheelchair. This may be associated with a propulsion pattern that allows prolonged pushrim contact and contributes to the greater efficiency of propulsion observed. Propelling the wheelchair on Mat and Ramp was associated with higher propulsive work cost than on Tile. The study added to the body of evidence that, as well as weight differences, differences in setup and configuration options may contribute to the reduction in energy cost associated with propulsion using the K5 wheelchair.BACKGROUND
The 2012 Americans with Disabilities Report (Brault, 2012) estimated that approximately 67,000 children under the age of 15 are manual wheelchair users. Due to an earlier onset of manual wheelchair use, these children may be more predisposed to chronic overuse and long term upper body injuries than adult populations (Ballinger, Rintala, & Hart, 2000). These injuries might severely diminish independence, function, and quality of life during development and later adult life. Although wheelchair propulsion kinematics and kinetics have been widely studied for adult populations (Collinger et al., 2008; Robertson, Boninger, Cooper, & Shimada, 1996), there have been fewer studies of pediatric manual wheelchair propulsion. This leaves an important group of wheelchair users with specific limitations and challenges in their mobility to be further investigated.
There are a wide range of wheelchairs that are commercially available, and design and materials can dramatically impact the interaction between the user and the wheelchair (Cowan, Nash, Collinger, Koontz, & Boninger, 2009). The United States Healthcare Common Procedure Coding System (Medicare & Medicaid, 2003) includes classifications for wheelchairs coded as K0004 (‘High strength lightweight wheelchairs’, ‘K4’) and K0005 (‘Ultra-lightweight manual wheelchairs’, ‘K5’). K5 wheelchairs have a rigid frame, and allow a range of adjustments for multiple features that include axle configuration, wheel camber, and seat and back angles, whereas K4 wheelchairs have a folding frame, are heavier and offer fewer configuration options. Since the additional cost of K5 wheelchairs can present an obstacle to their acquisition, understanding the differences in propulsive work cost and movement patterns associated with these two wheelchair types is important to the clinical care of pediatric manual wheelchair users.
High prevalence of upper limb injuries (Ballinger et al., 2000), has been linked to the increased loading and overuse resulting from long periods of manual wheelchair activity (Mercer et al., 2006). Moreover, joint loading and overuse can be influenced by the amount of work and joint motion associated with manual wheelchair propulsion.
Daily wheelchair propulsion can take place on many surface types with different propulsive demands that require biomechanical adaptations from the user (Cowan et al., 2009). It is therefore desirable that comparative studies of wheelchair propulsion provide some representation of this variability. Many previous studies have investigated wheelchair propulsion over different surfaces (Cowan et al., 2009) and slopes (Cowan et al., 2009; Richter, Rodriguez, Woods, & Axelson, 2007). While these studies provided important information about the forces generated during wheelchair propulsion on different surfaces and slopes, we found no prior reports of propulsion kinematics or energy cost under such variations of propelling conditions.
In this paper, we report maximum shoulder flexion and propulsive work cost in a pediatric population during propulsion of K4 and K5 manual wheelchairs in a range of trial conditions. Our overall hypothesis for propulsive work cost was that this measure would be higher when measured in the K4 wheelchair, and higher in more challenging conditions. We hypothesized that maximum shoulder flexion would differ between wheelchair types and between trial conditions.
METHODS
Eight children and teenagers (7M, 1F) between 12 and 18 of age participated in the study. All participants used manual wheelchairs as their primary means of mobility. Diagnoses indicated: cerebral palsy (3), spinal cord injury (SCI) (2), spina bifida (2), and Friedrich’s ataxia (1). All research procedures were approved by Kessler Foundation’s Institutional Review Board.
A K5 wheelchair (Tilite ZRA, Pasco, WA) and a K4 wheelchair (Invacare 9000XT, Elyria, OH) in one of three available sizes were set up for each participant by a certified Assistive Technology Professional (author TD). The K4 wheelchairs were on average 4.5 Kg heavier, and while seating in the K4 wheelchair is fixed and level, the adjustable wheel axle in the K5 wheelchair resulted in a lower seating position overall.
An instrumented pushrim wheel (SmartWheel, Outfront, Mesa, AZ) with a solid treaded tire was placed on the right side of the study wheelchair to record instantaneous pushrim kinetics and wheel speed with a sampling frequency of 240Hz. A non-instrumented wheel supplied with the system was placed on the left side. Upper body kinematic data were collected using Inertial Measurement Units (IMU) (Xsens MVN Biomech, Enschede, The Netherlands) with a sampling frequency of 60Hz. An additional IMU sensor (‘WCIMU’) was attached to the wheelchair frame to allow detection of vertical acceleration and inclination angle.
The order of testing was randomized by wheelchair and trial condition, with all trials being completed in the first wheelchair before changing to the second. Participants were allowed up to 10 minutes to practice propelling each wheelchair. Following the initiation of data collection, participants were asked to propel from a stationary position at a comfortable speed, such as they would typically during daily life. All trials took place in the hallway of a pediatric hospital. In the Tile condition, participants propelled for 10 meters across a level tiled floor. In the Mat condition, participants traversed an 8.9cm thick, 2.2m long polyfoam mat which was intended to represent wheeling across outdoor grassy terrain. In the Ramp condition, participants ascended an Americans with Disabilities Act (ADA) compliant ramp, located in the hospital hallway. The ramp length was approximately 4.8m, with varying slope and maximum slope of 5° for 1.2m. Participants performed 3 consecutive trials for each wheelchair/test condition combination.
Kinetic data were down-sampled to match the sampling frequency of the IMU system. Portions of the synchronized kinematic and kinetic data (‘selection period’) were selected from each trial based on prescribed initiation and termination events. Ground distance traveled was calculated by time integration of wheel speed measured directly from the instrumented pushrim. Only complete propulsion cycles within each of these selections were analyzed. The start of each propulsion cycle represented the instant of pushrim release from the previous cycle; it was defined by detecting the drop of tangential pushrim force to below a threshold value defined as 4N. For Tile, data for 7m of travel following the first 3m (to account for acceleration) were selected. For Mat, data were selected between instants of rolling onto and off the mat as detected from the WCIMU’s vertical acceleration signal. For Ramp, the initiation event was a characteristic feature of the WCIMU’s vertical inclination signal corresponding to the beginning of a constant grade section of the ramp. The selection proceeded for a calculated ground distance of 3m, which included the constant grade section.
Propulsive work was calculated for all selection period cycles consecutively by integration of instantaneous propulsive power with respect to time. This power was calculated from the product of the propulsion torque (measured by the instrumented pushrim) and the angular velocity (ratio of wheel speed to rolling radius). Propulsive work cost per distance traveled (Wd) was calculated by dividing by the distance traveled. Maximum shoulder flexion (SLmax) was calculated for every propulsive cycle from the IMU system shoulder angle output.
A two-way repeated measures ANOVA with a significance level of 0.05 was used to test for significant main and interaction effects of wheelchair type (K4, K5) and trial condition (Tile, Mat, Ramp). Bonferroni post hoc comparisons were used to determine pair-wise differences between groups.
RESULTS
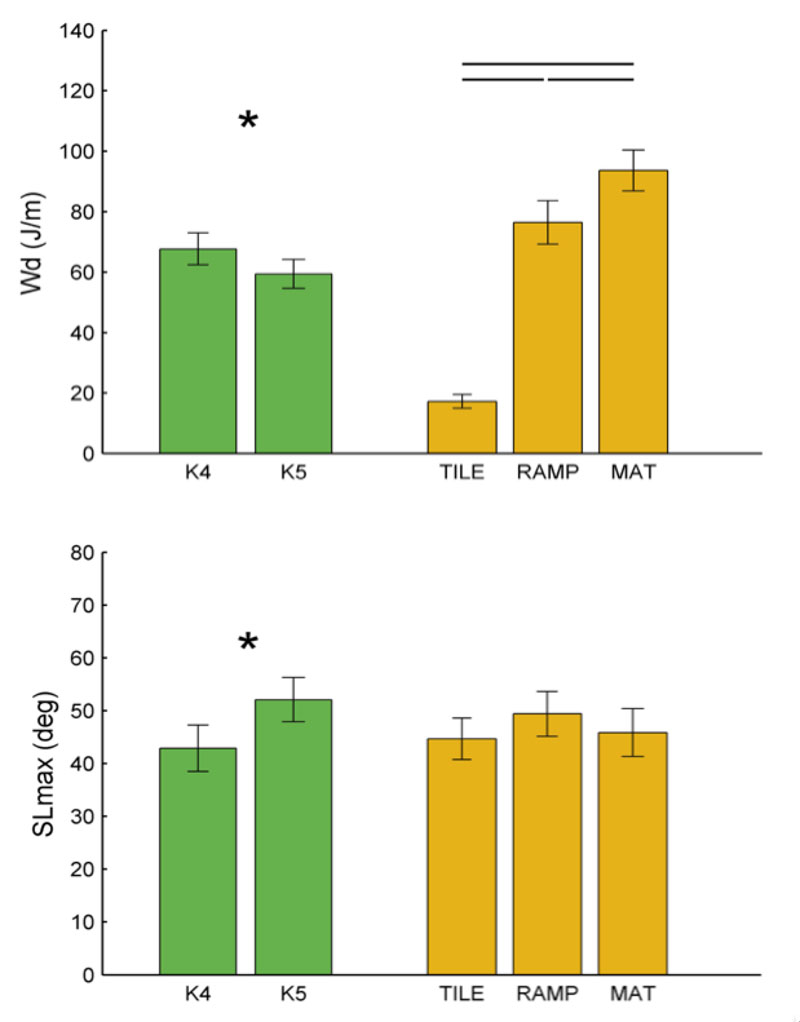
Grouped SLmax for the K5 wheelchair was higher (p=0.003, Δ = 9.5±2.0°) (Fig. 1). Within trial conditions, SLmax was significantly higher for K5 on Tile (p=0.002), Ramp (p=0.034) and Mat (p=0.001).
DISCUSSION
Our study measured the propulsive work cost relative to distance traveled, and found that this measure was 8.3±1.7 J∙m-1 higher for the K4 wheelchair. These findings are consistent with expectations based on the higher weight of the K4 wheelchair and the consideration of the test conditions: in Ramp, the work to increase potential energy increases with weight, whereas for Mat the loss of energy due to rolling resistance is increased with weight. As a ratio of cost (propulsive work) to benefit (distance traveled), results from this measure may be compared with previous reports on efficiency. Having found no reports investigating propulsive efficiency in pediatrics, we review reports from adult populations, and we acknowledge that this difference represents a limitation on our ability to compare with results and mechanisms described in those studies. Beekman, Miller-Porter, and Schoneberger (1999) reported higher oxygen cost per distance travelled (VO2 mL/kg/m) when adults with SCI propelled heavier, folding frame standard wheelchairs than when they propelled rigid frame, ultralight wheelchairs. Van der Woude, Veeger, Rozendal, and Sargeant (1989) reported the effects of seating height on gross mechanical efficiency (GME), defined as the ratio of energy expenditure (derived from oxygen uptake) to the external power output measured during wheelchair propulsion on a treadmill. Lower seat height was associated with increased GME, and it is possible that the lower seating height in the K5 wheelchair contributed to the lower propulsive work cost we observed. Overall, our data indicate that the use of the K5 wheelchair by pediatric manual wheelchair benefits mobility through decreased energy cost.
Higher maximum shoulder flexion angles were observed (9.5± 2.0°) when participants propelled in the K5 wheelchair. Maximum shoulder flexion takes place at the end of the propulsive phase, suggesting that the K5 allows the user to prolong the contact with the pushrim during the final part of this phase. This higher maximum shoulder flexion and prolonged pushrim contact might contribute to the reduced propulsive work cost.
Marked differences in propulsive work cost were recorded between conditions. Conversely, no significant differences were found for maximum shoulder flexion, suggesting that this measure is relatively invariant. This invariance in active range of motion might be important to the overuse injury mechanism of the shoulder during wheelchair propulsion in pediatrics.
Our study reports on the differences in propulsive work cost and maximum shoulder flexion between representative K4 and K5 wheelchairs. Together these findings add to the body of evidence that, in addition to lighter weight, differences in configuration options impact the effectiveness of manual wheelchairs. A more comprehensive study of differences in forces and propulsion patterns associated with these wheelchair types and propulsion conditions is ongoing.
REFERENCES
Ballinger, D. A., Rintala, D. H., & Hart, K. A. (2000). The relation of shoulder pain and range-of-motion problems to functional limitations, disability, and perceived health of men with spinal cord injury: a multifaceted longitudinal study. Archives of Physical Medicine and Rehabilitation, 81(12), 1575-1581.
Beekman, C. E., Miller-Porter, L., & Schoneberger, M. (1999). Energy cost of propulsion in standard and ultralight wheelchairs in people with spinal cord injuries. Physical therapy, 79(2), 146-158.
Brault, M. W. (2012). Americans with disabilities: 2010. Current Population Reports, 7, 0-131.
Collinger, J. L., Boninger, M. L., Koontz, A. M., Price, R., Sisto, S. A., Tolerico, M. L., & Cooper, R. A. (2008). Shoulder biomechanics during the push phase of wheelchair propulsion: a multisite study of persons with paraplegia. Archives of Physical Medicine and Rehabilitation, 89(4), 667-676.
Cowan, R. E., Nash, M. S., Collinger, J. L., Koontz, A. M., & Boninger, M. L. (2009). Impact of surface type, wheelchair weight, and axle position on wheelchair propulsion by novice older adults. Archives of Physical Medicine and Rehabilitation, 90(7), 1076-1083.
Medicare, & Medicaid. (2003). Healthcare Common Procedure Coding System (HCPCS): Centers for Medicare & Medicaid Services.
Mercer, J. L., Boninger, M., Koontz, A., Ren, D., Dyson-Hudson, T., & Cooper, R. (2006). Shoulder joint kinetics and pathology in manual wheelchair users. Clinical Biomechanics, 21(8), 781-789.
Richter, W. M., Rodriguez, R., Woods, K. R., & Axelson, P. W. (2007). Stroke pattern and handrim biomechanics for level and uphill wheelchair propulsion at self-selected speeds. Archives of Physical Medicine and Rehabilitation, 88(1), 81-87.
Robertson, R. N., Boninger, M. L., Cooper, R. A., & Shimada, S. D. (1996). Pushrim forces and joint kinetics during wheelchair propulsion. Archives of Physical Medicine and Rehabilitation, 77(9), 856-864.
Van der Woude, L., Veeger, D.J., Rozendal, R., & Sargeant, T. (1989). Seat height in handrim wheelchair propulsion. Journal Rehabilitation Research & Development, 26(4), 31-50.
ACKNOWLEDGEMENTS
Support for this study was provided by Children’s Specialized Hospital (Mountainside, NJ) and Kessler Foundation (West Orange, NJ).