Louise Thomas1,3, Dr. Carolyn Sparrey1,3, and Dr. Jaimie Borisoff2,3
1Simon Fraser University. 2British Columbia Institute of Technology. 3International Collaboration on Repair Discoveries (ICORD). Vancouver, BC, Canada
Background
Over 60% of active manual wheelchair users experienced falls due to instability over a three year period (Chen et al., 2011). Such incidents occasionally resulted in traumatic brain injury or bone fractures (Opalek et al., 2009). Clearly wheelchair stability is important, but it is not the only design consideration.
Manual wheelchairs must also be easy to push, i.e. maneuverable. This comes at the cost of reduced stability (Brubaker, 1986; Tomlinson, 2000). Maneuverability is improved by increasing the load on the rear wheels (normally done by moving the rear axle position forward). In contrast, the wheelchair is more stable when the load is distributed between the front and rear wheels. A compromise is found between the two objectives, with the optimal configuration dependant on the specific use case.
Adjustable “on the fly” or dynamic seating allows users to change their wheelchair seat configuration throughout the day (Borisoff and McPhail, 2011). Such changes have been identified by RESNA as important for health reasons, easing transfers, improving reach, and enhancing independence (Arva et al., 2009). Dynamic seating changes may move the centre of gravity of the system, affecting the maneuverability and stability of the wheelchair. However, to date little quantitative research has been conducted on the extent of these effects.
Purpose
This study aimed to determine the effects of seat dump, backrest angle, rear axle position, and user position (i.e. offset between a user’s hips and the backrest) on wheelchair stability and maneuverability, and to identify optimal seat configurations for sloped environments.
Methods
Wheelchair simulation
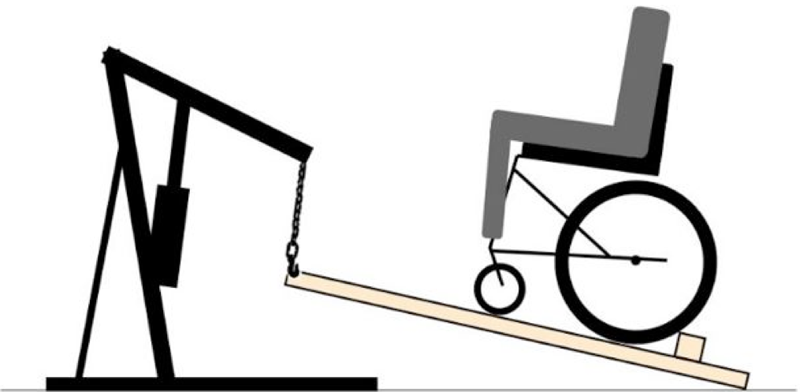
The geometry of the simulation was created using a CAD model of an ultralight manual wheelchair with dynamic seating (Elevation™, PDG Mobility, Canada) and validated using physical measurements of the same wheelchair. The wheelchair had 25” diameter wheels, 5” casters, a seat depth of 16”, and a seat width of 16”. The 250-lb test dummy was modeled to meet ISO 7176-11 standards.
Experimental testing
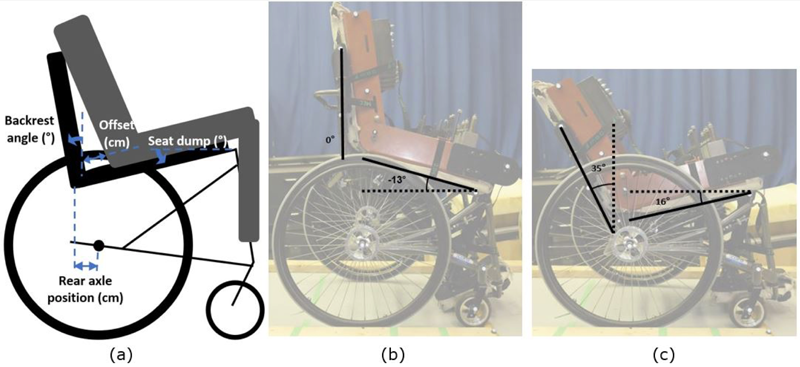
A full-factorial array of three seat and three backrest positions was tested. Configurations ranged from a seat angle of -13° and vertical backrest (Figure 2 b) to a seat angle of 16° and backrest reclined 35° (Figure 2 c). Each configuration was tested three times for both forwards and backwards stability. In all cases, there was less than 2° difference between the simulated and experimental tip results.
Analysis
The simulations were run for full-factorial combinations of five backrest angles (-5° to 35°), seat dumps (-10° to 20°), rear axle positions (0cm to 20cm forward from the backrest), and offset distances between the user and the backrest (0cm to 8cm). The reaction forces on each wheel and the tip angles were recorded. The ratio of load on the rear wheels were calculated using MATLAB (Mathworks Inc., USA). This metric related the centre of gravity (CoG) of the wheelchair-user system to its performance, with a higher ratio indicating a more maneuverable but less stable configuration.
Results
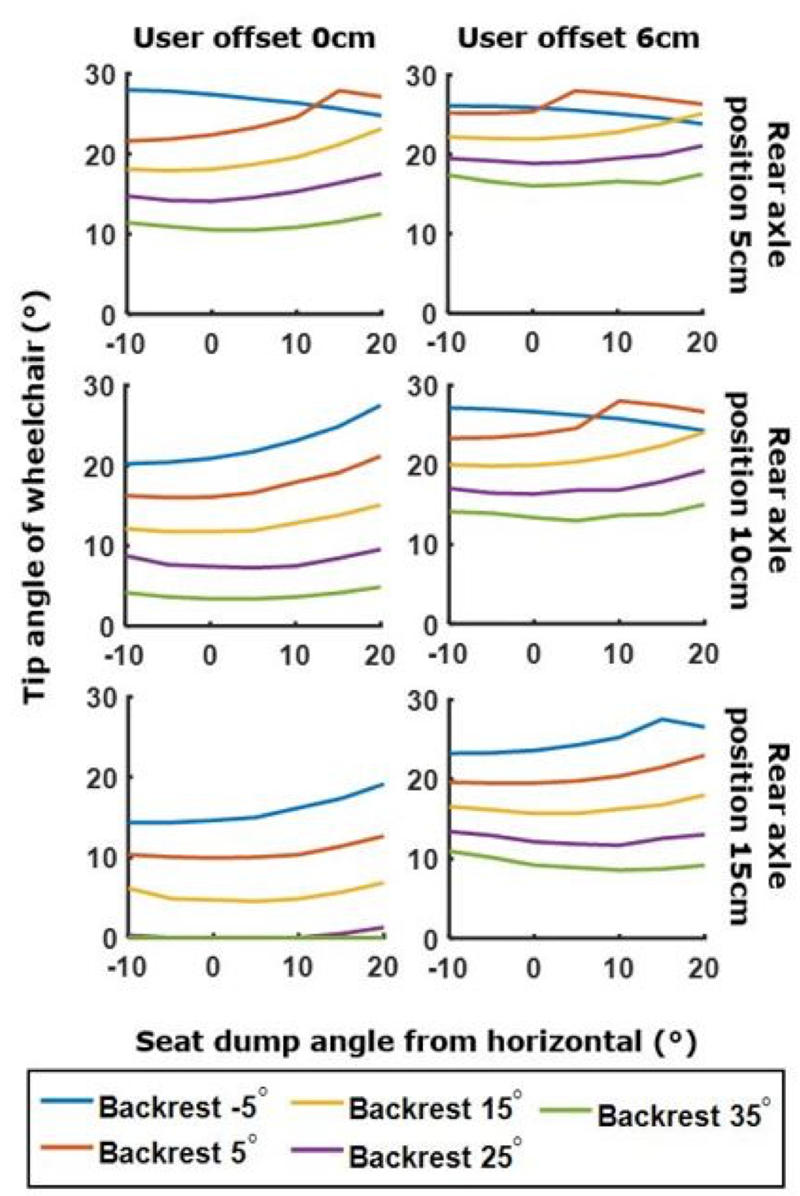
The angle of the backrest had the greatest effect on stability when the rear axle was moved forward, there was no user offset, and the seat was fully lowered. For a rear axle position of 10cm and no offset, a stability change of over 20° could be achieved just by changing the backrest (left middle panel, Figure 3).
In general, a lower rear seat corresponded to a small increase in stability, with greater effects for more extreme seat angles. For certain more stable configurations, the effect of seat dump on stability was reversed.
Discussion
A wheelchair should be stable enough so that it does not tip over in the user’s environment, but any more stability than necessary may impact performance and maneuverability (Tomlinson, 2000). Therefore, the load ratio on the rear wheels should be as high as possible without causing instability, (which always occurs at a ratio of 1).
For a fixed frame seating configuration, the stability and maneuverability are changed by the positioning of the rear axles and the posture of the user. Though the rear axle positioning has the greater effect of these two variables, our results show that user positioning is not inconsequential. Therefore, user posture should be considered when initially configuring a wheelchair and when instructing a new user. For example, if a user naturally slouches in a way that their lower back is 1cm offset from the base of the backrest, the rear axles could be moved forward about 0.4cm to maintain the stability and maneuverability of the wheelchair system (keeping all other variables constant). In addition, if a user moves forward in their seat the wheelchair will become more stable but less efficient for wheeling performance.
For wheelchairs with the capability, on-the-fly changes to seat and backrest configurations allow the wheelchair to be more tippy, and therefore more maneuverable, for a set initial configuration. For a fixed rear axle position and user offset, our simulations showed changes to the seat and backrest positions enable the wheelchair stability to vary by up to 22°. Backrest position has the greatest effect on stability and maneuverability; however, seat dump angle also affects the performance on steeper slopes.
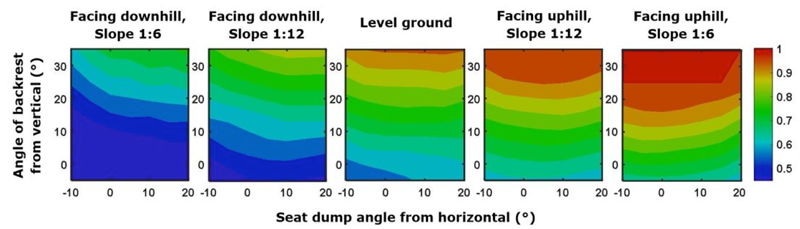
Using dynamic changes to the wheelchair configuration, it is also possible to maintain the same front/rear wheel load distribution, and therefore maneuverability, of the wheelchair when it is on a slope. Figure 4 shows that when a wheelchair is set up to be stable on level ground, a rear load ratio of 0.75 (as used by Tomlinson, 2000) can be maintained for any slope between +9.5° and -9.5° by adjusting the seat and backrest angles. This is well within the wheelchair ramp standard of 1:12, or 4.8°. The backrest angle, rather than the seat dump, is the main enabler for this range.
Maintaining an optimal rear wheel load ratio could improve wheeling capabilities and safety in the community. For instance, when wheeling uphill, a backrest adjusted forward would provide support to users leaning into the slope; similarly, when traveling downhill, a backrest adjusted to more recline would provide the user with balanced trunk support and wheeling stability (Borisoff and McPhail, 2011; Hong et al., 2011), and obviate the need to be in a “wheelie”.
Limitations
A major limitation of the model is that it only looked at static stability, which does not completely reflect real world wheelchair use. As the user was modelled on an ISO dummy, it will also only represent a certain percentage of the wheelchair user population.
Conclusion
Rear axle position has the greatest effect on wheelchair stability and maneuverability. The backrest angle was the next most influential factor, and had significant dependencies on each of the other variables. By adjusting back and seat angles, stability changes of over 20° can be achieved.
References
Arva, J., Schmeler, M., Lange, M., Lipka, D. and Rosen, L. (2009), “RESNA position on the application of seat-elevating devices for wheelchair users”, Assistive Technology, Vol. 21, pp. 69–72.
Borisoff, J. and McPhail, L. (2011), “The development of an ultralight wheelchair with dynamic seating”, Proceedings of the 2011 Annual RESNA Conference.
Brubaker, C.E. (1986), “Wheelchair prescription: an analysis of factors that affect mobility and performance.”, Journal of Rehabilitation Research and Development, Vol. 23, pp. 19–26.
Chen, W.-Y., Jang, Y., Wang, J.-D., Huang, W.-N., Chang, C.-C., Mao, H.-F. and Wang, Y.-H. (2011), “Wheelchair-related accidents: relationship with wheelchair-using behavior in active community wheelchair users.”, Archives of Physical Medicine and Rehabilitation, Vol. 92, pp. 892–898.
Hong, E.-K., Pearlman, J., Salatin, B., Wang, H., Liu, H.-Y., Cooper, R. and Hargroder, T. (2011), “Design and Development of a Lightweight, Durable, Adjustable Composite Backrest Mounting”, Assistive Technology, Vol. 23, pp. 24–35.
Opalek, J.M., Graymire, V.L. and Redd, D. (2009), “Wheelchair falls: 5 years of data from a level I trauma center.”, Journal of Trauma Nursing : The Official Journal of the Society of Trauma Nurses, Vol. 16, pp. 98–102.
Tomlinson, J.D. (2000), “Managing maneuverability and rear stability of adjustable manual wheelchairs: an update.”, Physical Therapy, Vol. 80, pp. 904–911.
acknowledgments
The authors would like to thank SFU students Tanuj Singla and Garrett Kryt for respectively helping with the creation and validation of the wheelchair model.