Hand-rim biomechanics of geared manual wheelchair mobility
Omid Jahanian1, Alan Gaglio2, Scott Daigle2, Vaishnavi Muqeet3, Alyssa J. Schnorenberg1, Elizabeth T. Hsiao-Wecksler2, Brooke A. Slavens1
1University of Wisconsin-Milwaukee, 2University of Illinois at Urbana-Champaign, 3Medical College of Wisconsin
INTRODUCTION
Approximately 90% of wheelchair users use hand-rim propelled manual wheelchairs [1]. However, manual wheelchair mobility has been described as a low efficient and physically straining form of mobility [2], with high risk of repetitive strain injuries and pain [3]. This often leads to reduced independent function and quality of life. The high prevalence of upper extremity (UE) pain and secondary injuries among manual wheelchair users with spinal cord injury (SCI) is a clear indication of unfavorably high loading during manual wheelchair propulsion [4]. The mechanical stresses from propulsion over uneven ground, ramps and carpet [5], and during starting from rest [6] have been reported to be more demanding and detrimental to the upper limbs.
Geared manual wheelchairs (GMWs) are a promising alternative propulsion mechanism that may reduce the biomechanical demands of the UE while maximizing function [7-10]. Similar to a multi-speed bicycle, GMWs allow users to choose the option of wheeling in a lower gear, which may make propulsion easier. Studies on non-wheelchair users have indicated that using GMWs could decrease the UE muscular demand during propulsion and may be beneficial for strenuous tasks such as ramp ascent [7,8] and propulsion on carpeted floors [9]. Another study with manual wheelchair users [10] indicated the potential for shoulder pain reduction with the use of GMWs. However, no research has evaluated the effects of using GMWs on hand-rim and UE joint kinetics (forces and moments) in manual wheelchair users. The purpose of this study was to investigate the effects of using GMWs on hand-rim biomechanics during starting and propulsion on carpeted level floor in individuals with SCI.
METHODS
This study was approved by the Department of Veterans Affairs (Milwaukee, WI) and the University of Wisconsin-Milwaukee (UWM) Institutional Review Boards. Prior to data collection, each subject signed an informed consent form. Veterans with SCI who met the inclusion criteria were examined by a physician at the SCI unit at Milwaukee Clement J Zablocki VA Medical Center. Five manual wheelchair users with SCI (male) were recruited for study participation at the UWM Mobility Lab. Table 1 provides characteristics of the subjects.
Data collection
Subjects used their personal standard manual wheelchairs equipped with the IntelliWheels geared wheels (IntelliWheels, Inc., Champaign, IL), which allowed them to propel in direct drive (gear ratio of 1:1), or shift into a low gear (gear ratio of 1.5:1). After an acclimation period of 15-30 minutes, subjects were asked to propel their wheelchair over an 8-meter, carpeted level-floor (padding thickness: 9.5 mm and carpet thickness: 17.5 mm) in both low gear (geared) and direct drive conditions, in a random order. Subjects were instructed to start propelling their wheelchair from a resting position, on the carpet, up to their self-selected normal speed in a straight line and to end the trial at the designated finish line on the carpet. There were five trials for each condition (total ten trials).
An IntelliWheels geared wheel with a custom instrumented hand-rim, previously developed and validated by our team [11, 12], was mounted to the wheelchair on the subject’s dominant side to measure hand-rim kinetics. A non-instrumented IntelliWheels geared wheel, with the same geometry and inertia as the instrumented geared wheel, was mounted on the opposite side. Hand-rim kinetic and kinematic data were collected at 120 Hz and transferred via Bluetooth to the main computer. The instrumented hand-rim coordinate system follows the right-hand rule with positive “x” forward and positive “y” up, and positive “z” pointing out of the wheel along the axle [12]. Kinetic data were filtered with a 4th-order, low-pass Butterworth filter with a 20 Hz cutoff frequency.
Data analysis
Three components of the applied hand-rim forces (Fx, Fy, and Fz), the propulsive moment about the hub (Tz), and the hand-rim angular position data (θ) from the instrumented hand-rim during each trial were used for calculating hand-rim kinetic characteristics and stroke cycle characteristics of GMW propulsion on carpeted floor. The hand-rim kinetic characteristics included peak resultant force, peak propulsive moment, integrated resultant force, integrated propulsive moment, maximum rate of rise of the resultant force, and fractional effective force (FEF). The stroke cycle characteristics included stroke time, push time (expressed as percentage of stroke time), stroke angle, push angle, stroke distance, linear velocity, and stroke frequency. Stroke angle and push angle are
| Subject | Age (years) | Weight (kg) | Height (cm) | Arm dominance | SCI level | Years as wheelchair use |
| 1 | 55 | 97.7 | 185 | Right | T5, ASIA A | 31 |
| 2 | 36 | 80.2 | 175 | Right | L2, ASIA C | 12 |
| 3 | 57 | 81.2 | 180 | Right | T11, ASIA C | 7 (months) |
| 4 | 24 | 71.2 | 180 | Right | T5, ASIA A | 2 |
| 5 | 51 | 112.0 | 188 | Left | T12, ASIA C | 30 |
| Mean ± SD | 43 ± 14 | 82.5 ± 16.3 | 180 ± 5 | ___ | ____________ | 11.5 ± 14.6 |
respectively the angular movement of the wheel during one stroke cycle and during push phase.
The stroke cycle was divided into the push and recovery phases using the propulsive moment. Using a custom MATLAB program, the onset of the push phase was identified as the point at which the propulsive moment exceeded the detection threshold, which was the mean of the moment baseline plus 3 standard deviations. The end of the push phase was the point at which the propulsive moment returned to the baseline and remained under the threshold. For the start condition the first stroke cycle was used for analyses. For the propulsion condition (semi-steady state), the first and the last two strokes of each trial were removed and the averaged values over the rest of the trials were used for analysis.
The kinematic parameters including the stroke distance, linear velocity, stroke angle and push angle were determined from the hand-rim angular position data for each stroke cycle. Because of the relative motion between the hand-rim and the wheel during the geared condition, the calculated kinematic values were divided by 1.5 for these trials (geared condition). Push angle was calculated for both angular movement of the wheel (Push Angle-W) and angular movement of the hand-rim (Push Angle-HR). The normalized stroke cycle frequency was calculated as the ratio of stroke cycle frequency to the stroke distance which indicates the number of stroke cycles required to propel one meter. The rate of rise of the resultant force was determined by differentiating the resultant force with respect to the time [5]. FEF is the percentage of the tangential force that contributed to the resultant force, where tangential force was obtained by dividing the propulsive moment by the radius of the hand-rim (0.275 m). This definition of tangential force assumes that the grip moment during push phase is negligible [5]. To investigate the kinetic demands of manual wheelchair propulsion, the integration of the forces and moments during the push phase were calculated for both start and propulsion tasks during both conditions. To compare the two conditions, the integrated force and moment were divided by the travelled distance (normalized integrated force or moment) and were analyzed for the propulsion task.
To compare the hand-rim biomechanics data between geared and direct drive conditions, statistical analyses were completed with IBM SPSS software using separate paired samples t-tests (significance level = 0.05) for start and propulsion conditions. To evaluate the practical significance of using geared wheels on carpeted floor, the standardized mean difference (d, effect size) was calculated as the ratio of the mean of the difference scores to the standard deviation (SD) of the difference scores [13] for all metrics of interest.
RESULTS
Mean values (SDs) and the statistical results for the stroke cycle characteristics and hand-rim kinetics during both conditions and tasks are reported in Table 2. The peak propulsion moment (Table 2), the integrated force and moment values (Figure 1) were all statistically significantly less during both the starting and propulsion tasks when using the geared wheels in comparison to direct drive condition. The peak resultant force, and maximum rate of rise of resultant force (Table 2) were significantly less with geared wheels during the propulsion task only.
The average propulsion speed decreased significantly (t = 2.92, p = 0.043, and d =1.3) during the geared condition (0.79 m/s + 0.14) in comparison to the direct drive condition (1.00 m/s + 0.10). Using the GMW did not alter the stroke cycle frequency significantly. The stroke cycle frequency was 0.93 Hz (+/- 0.11) and 0.95 Hz (+/- 0.17), during the direct drive and geared conditions. The normalized stroke cycle frequency during the geared condition (1.15 Hz/m + 0.25) increased significantly (t = -6.1, p = 0.004, and d = -2.72) in comparison to direct drive condition (0.88 Hz/m + 0.19). The push phase during the geared condition for the start task was significantly shorter in comparison to the direct drive condition, while the push angle (hand-rim) was significantly increased during the geared condition.
DISCUSSION AND CONCLUSION
The significant differences in hand-rim kinetics seen between the geared and direct drive conditions indicate potential benefits of using GMWs on carpeted floor during both propulsion and starting tasks. Previous studies [14, 15] have shown that the reduction of propulsion forces, wheel torque, and rate of force application could
| Start | Propulsion | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Direct Drive | Geared | Statistical Results | Direct Drive | Geared | Statistical Results | |||||
| Mean (SD) |
Mean (SD) |
t | p | d | Mean (SD) |
Mean (SD) |
t | p | d | |
| Stroke Distance (m) |
0.84 (0.09) | 0.69 (0.03) | 3.99 | 0.016* | 1.78 | 1.08 (0.13) | 0.83 (0.05) | 4.58 | 0.010* | 2.05 |
| Stroke Time (s) |
1.44 (0.06) | 1.31 (0.19) | 2.03 | 0.112 | 0.9 | 1.08 (0.11) | 1.07 (0.18) | 0.04 | 0.969 | 0.02 |
| Push Time (%) |
69.20 (3.46) | 60.26 (1.74) | 7.21 | 0.002* | 3.22 | 52.86 (3.95) | 48.18 (2.93) | 1.95 | 0.120 | 0.87 |
| Stroke Angle (deg.) |
156.86 (17.83) | 128.86 (6.85) | 3.99 | 0.016* | 1.78 | 200.59 (25.92) | 155.67 (10.77) | 4.59 | 0.010* | 2.05 |
| Push Angle-W (deg.) |
86.03 (7.17) | 60.96 (3.60) | 15.06 | 0.000* | 6.73 | 100.00 (12.24) | 69.71 (10.02) | 17.18 | 0.000* | 7.68 |
| Push Angle-HR (deg.) |
86.03 (7.17) | 91.44 (5.40) | -5.52 | 0.005* | -2.47 | 100.00 (12.24) | 104.57 (15.04) | -2.09 | 0.104 | -0.94 |
| Max Force (N) | 129.41 (39.87) | 117.55 (38.97) | 1.33 | 0.255 | 0.59 | 121.75 (29.86) | 96.36 (25.25) | 3.72 | 0.020* | 1.66 |
| Max Moment (N.m) |
32.47 (6.18) | 25.81 (7.25) | 3.79 | 0.019* | 1.69 | 28.91 (5.19) | 22.05 (4.49) | 7.08 | 0.002* | 3.17 |
| Max RoR Force (N/s) | 942.3 (217.3) | 916.1 (303.1) | 0.24 | 0.822 | 0.11 | 1450.4 (358.6) | 1180.6 (435.9) | 3.04 | 0.038* | 1.36 |
| FEF (%) | 101.71 (19.40) | 84.10 (14.82) | 3.54 | 0.024* | 1.58 | 79.75 (11.14) | 70.01 (7.43) | 3.99 | 0.016* | 1.78 |
t = t-statistics; p = significance level; d = effect size; RoR = rate of rise; W = wheel; HR = hand-rim; *: p < 0.05.
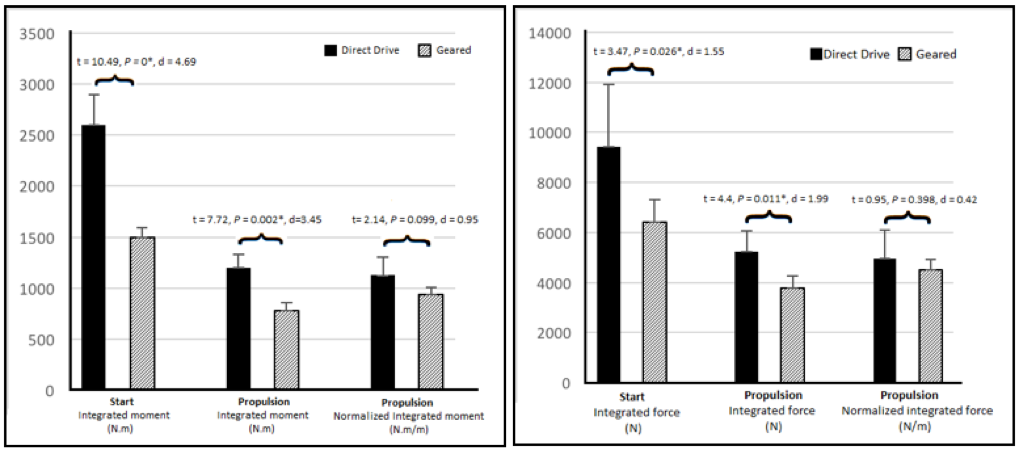
increase the manual wheelchair efficiency and decrease the risk of development of UE limb injuries. Combined metrics, such as normalized integrated moment and force provide valuable information and could help to better characterize the impact that using geared wheels could have on kinetic, kinematic and temporal detrimental factors in manual wheelchair users. The results (Figure 1) demonstrate that using the geared wheel decreased the normalized integrated moment, but the reduction in normalized integrated force was not substantial. The large values reported for the FEF (greater than 100%), indicate that the assumption of the negligible hand moment during push phase was not valid. The results for the FEF during the start task (values that are close to or greater than 100%) demonstrate the significant contribution of the hand moment in starting from rest.
The significant decrease in propulsion speed during the geared condition was mainly due to the significant reduction in the stroke distance, which was the direct effect of the gear reduction (1.5:1). The substantial increase in the normalized stroke frequency during the geared condition, which could lead to higher repetition of UE joint motions, is the main drawback for the geared wheels. High-repetition UE joint motions have been significantly related to increased risk of UE injuries in manual wheelchair users [14,15].
The results from this study demonstrated that the propulsion forces, wheel torque, and rate of force application during start and propulsion tasks were reduced substantially while using the geared wheel, which could potentially reduce the risk of the incidence of injuries such as carpal tunnel syndrome and UE joint pain [14, 15]. The current investigation suggests that using geared wheels could be beneficial for manual wheelchair users to independently accomplish more strenuous tasks such as propulsion on carpeted floor, while reducing the risk of secondary UE injuries. Further investigation of hand-rim biomechanics, joint dynamics, muscle activity and energetics is underway with a larger population of manual wheelchair users with SCI to determine the types of mobility tasks and populations of users for which GMWs are beneficial. This work has the potential to impact clinical decision making for wheelchair prescription, training, and usage.
ACKNOWLEDGMENTS
The content of this work was developed under a National Institutes of Health (NIH) SBIR Phase II grant number 2R44HD071653- 02 and a student research grant from UW-Milwaukee College of Health Sciences.
REFERENCES
[1] Kaye HS, Kang T, LaPlante MP. Mobility device use in the United States. Washington, DC: National Institute on Disability and Rehabilitation Research, US Department of Education; 2000.
[2] Van der Woude LH, de Groot S, Janssen TW. Manual wheelchairs: research and innovation in sports and daily life. Science & sports. 2006; 21(4):226-35.
[3] Mercer JL, Boninger M, Koontz A, Ren D, Dyson-Hudson T, Cooper R. Shoulder joint kinetics and pathology in manual wheelchair users. Clinical Biomechanics. 2006; 21(8):781-9.
[4] Van der Woude LH, Veeger HE, Dallmeijer AJ, Janssen TW, Rozendaal LA. Biomechanics and physiology in active manual wheelchair propulsion. Medical engineering & physics. 2001; 23(10):713-33.
[5] Koontz AM, Cooper RA, Boninger ML, Yang Y. A kinetic analysis of manual wheelchair propulsion during start-up on select indoor and outdoor surfaces. Journal of rehabilitation research and development 2005;42(4):447.
[6] Morrow MM, Hurd WJ, Kaufman KR, An KN. Shoulder demands in manual wheelchair users across a spectrum of activities. Journal of Electromyography and Kinesiology. 2010; 20(1):61-7.
[7] Howarth SJ, Pronovost LM, et al. Use of a geared wheelchair wheel to reduce propulsive muscular demand during ramp ascent: Analysis of muscle activation and kinematics. Clinical Biomechanics. 2010;25(1):21-8.
[8] Jahanian O, Schnorenberg AJ, and Slavens BA. Evaluation of shoulder joint kinematics and muscle activity during geared and standard manual wheelchair mobility. Engineering in Medicine and Biology Society (EMBC), 2016 IEEE 38th Annual International Conference (6162-6165); 2016.
[9] Jahanian O, Schnorenberg AJ, Hawi L, Slavens BA. Upper extremity joint dynamics and electromyography (EMG) during standard and geared manual wheelchair propulsion. In Proceeding of the 39th Annual Meeting of American Society of Biomechanics 2015.
[10] M. A. Finley and M. M. Rodgers, "Effect of 2-speed geared manual wheelchair propulsion on shoulder pain and function," Arch. Phys. Med. Rehabil., vol. 88, (12), pp. 1622-1627, 2007.
[11] Gaglio A, Liang J, Daigle S, Hsiao-Wecksler E. Design of a Universal Instrumented Wheelchair Hand Rim. Journal of Medical Devices. 2016;10(3):030956.
[12] Gaglio A, Daigle S, Gacek E, Jahanian O, et al. Validation of an Instrumented Wheelchair Hand Rim. 2017 Design of Medical Devices Conference: American Society of Mechanical Engineers; 2017.
[13] Kline Rex B. Beyond Significance Testing: Statistics Reform in the Behavioral Sciences. 2nd ed. APA; 2013.
[14] Boninger ML, et al. Pushrim biomechanics and injury prevention in spinal cord injury: recommendations based on CULP-SCI investigations. Journal of Rehabilitation Research and Development 2005;42(3):9.
[15] Boninger ML, Cooper RA, Baldwin MA, Shimada SD, Koontz A. Wheelchair pushrim kinetics: body weight and median nerve function. Archives of physical medicine and rehabilitation. 1999;80(8):910-5.