ABSTRACT
Current wheelchair tiedown and occupant restraint systems are often not being used or are improperly used to secure wheelchair-seated individuals traveling in large (fixed-route) buses. Anecdotal information points to emergency driving maneuvers as a common cause of wheelchair tipping and injury to wheelchair users traveling in these `low-g' type motor vehicles. The objective of our study was to investigate the wheelchair-occupant response to emergency driving maneuvers under less than optimal securement conditions.
BACKGROUND
Safe transport of wheelchair users in transit vehicles remains a challenge for service providers. Existing strap-type tiedowns and occupant restraint systems (WTORS) present problems for both vehicle operators and wheelchair users [2, 3]. Wheelchair users are often opposed to drivers interfering with their personal space when attempting to secure their wheelchair. Also, vehicle operators express difficulty with securing wheelchairs of various type and size. It is often difficult to secure all four wheelchair tiedowns, especially those closest to the vehicle wall. In many cases, real world transportation scenarios consist of less than the optimal four wheelchair tiedowns and less than the optimal shoulder and lap restraint.
In addition to the operational difficulties associated with using WTORS, there is also question as to the necessary level of securement on large transit buses that are primarily limited to city routes. Previous studies have shown that of all wheelchair related injuries (transit and non-transit related), only 0.3% involved a wheelchair aboard a moving vehicle [4]. Of these transit related injuries, only 6% were associated with a collision. In this same study, Shaw et al found that there were no documented injuries associated with high impact crashes in large transit buses. Such findings suggest that perhaps alternative securement methods may be acceptable when transport is limited to these larger transit vehicles.
OBJECTIVES
The objective of the study is to investigate the dynamic response of a less than optimally secured wheelchair and occupant when exposed to emergency driving maneuvers (turning and braking) associated with large transit vehicles.
METHOD
 |
This study utilized a Dynaman wheelchair and occupant computer simulation model to investigate dynamic response to turning and braking in a large transit vehicle. This model was originally developed to study 20g/30mph frontal impact scenarios and was validated accordingly [5]. It is important to note that the current model has not been validated for `low-g' (low impact) environments. Findings are therefore limited for use in studying trends associated with various securement scenarios and the low-g environment. The following securement/restraint scenarios were evaluated in this study:
-
four point wheelchair securement and no occupant restraint
-
two point wheelchair securement and no occupant restraint
-
two point wheelchair securement and pelvic restraint
A simulation model was build using a validated manual wheelchair model (34 lb) with arm rests and a 50th Percentile Male Hybrid III ATD (168 lb). The two securement and restraint scenarios indicated above were implemented in the model. Table 1 shows the variables and characteristics of the computer simulation model. Wheelchair P-point, occupant head and occupant lower torso excursions were measured throughout the maneuvering event and values up to 1000 ms were reported.
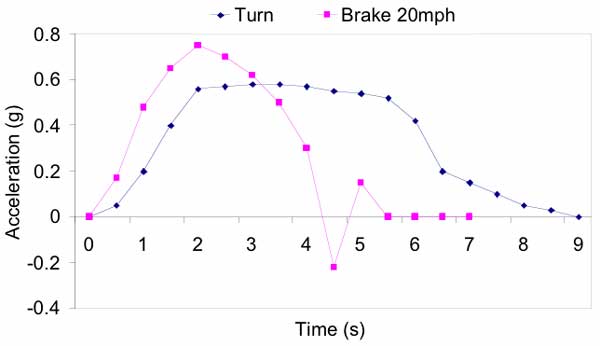
Pulse data for braking and turning used in simulation models was obtained from various studies conducted by the Cleveland Clinic Foundation and a study conducted by Mercer and Billing in which accelerations were measured in a 44 passenger transit bus (Table 1) (Figure 1) [1, 6-8].
Floor-wheel friction was held constant
at 0.5 for all scenarios. |
||
RESULTS
Scenario 1: 4-point tiedown and no occupant restraint
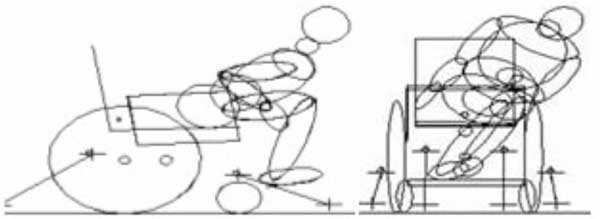 |
Braking: In all wheelchair CG and seat friction scenarios the occupant was ejected forward from the wheelchair during braking. Higher seat friction appeared to delay the forward excursion of the occupant. Increased head excursions at 1000 ms were associated with higher seat friction scenarios. Beyond 1000 ms, the SAE J2249 head excursion (25.6 cm) would likely be exceeded as the occupant was ejected for each braking scenario [9]. Lower torso forward excursion was greater in those cases where low seat friction was used (Figure 2).
Turning: In all wheelchair CG and seat friction scenarios the occupant impinges upon the wheelchair armrest and the upper torso/head rotates laterally beyond the wheelchair footprint (Figure 3). Vehicle components in proximity to the occupant, such as a vehicle wall, would have likely been impacted by the occupant's upper torso or head in each of the turning scenarios. Changes in wheelchair CG and seat friction parameters seemed to have little effect on wheelchair, head and torso excursions.
Scenario 2: 2-point tiedown (front and rear same side) and no occupant restraint
For Scenario 2, only worse case dynamics scenarios relative to tipping potential were analyzed; i.e. high wheelchair CG and high seat friction.
Braking: Similar to the 4-point tiedown scenario, emergency braking led to the occupant being ejected from the wheelchair. Accordingly, these cases resulted in head excursions that would exceed the SAE J2249 limit.
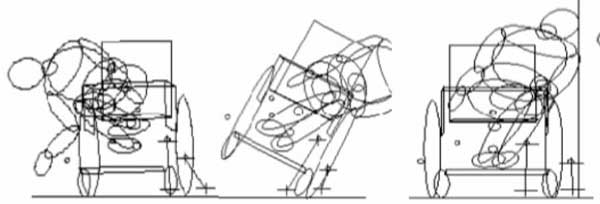
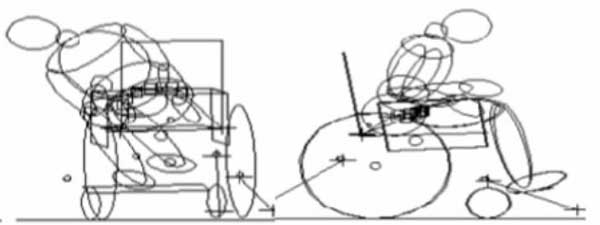
Turning: Turning towards the direction opposite of the two tiedowns, led to the wheelchair tipping over (Figure 4). Such a response would lead to the occupant impacting the vehicle interior and would greatly increase the risk of injury. The same simulation was re-run with the addition of a vehicle wall positioned 38 cm from the wheelchair centerline. With the wall in this position, it acted as a restraint or barrier to the wheelchair and occupant lateral rotation (Figure 5). Again this could create an injurious situation for the occupant since a vehicle wall is not typically designed with energy absorbing padding that would be necessary to serve as a bulkhead or barrier. When the turn was opposite of the side of the tiedowns the wheelchair did not tip, but the occupant rotated over the arm rest and would likely have fallen from the wheelchair or would impact the vehicle interior (Figure 6).
Scenario 3: 2-point tiedown (front and rear same side) and pelvic restraint
Braking: With a wheelchair mounted pelvic belt, the occupant did not topple out of the wheelchair and instead remained seated in the wheelchair. It is of interest to review this scenario with the pelvic restraint since all ANSI/RESNA WC19 certified wheelchairs are now required to make crashworthy pelvic restraints available on board these wheelchairs [10].
Turning: In exploring the dynamic response of a belted (pelvic restraint) occupant to turning towards the side opposite the tiedowns, it was found that the occupant still rotates over the arm rest, but perhaps to a slightly lesser degree than the unbelted occupant.
 |
 |
DISCUSSION
It is important to note that the model used for this analysis was not validated for the conditions evaluated in this study. This manual wheelchair-occupant model was validated to 20g/30mph frontal impact conditions. Therefore, the use of this model should be limited for comparison of trends across scenarios. Future efforts should include actual emergency maneuvering experiments that would provide experimental results that could also be used for model validation.
CONCLUSION
This study has investigated wheelchair and occupant dynamic response to emergency braking and turning in large transit vehicles. Our preliminary findings suggest that unsecured forward facing wheelchairs and unbelted occupants may not be safe even in non-crash conditions. Preliminary results indicate that the addition of the pelvic restraint improved the overall dynamic response of the occupant during braking and to a lesser extent during turning. Our findings support anecdotal reports of wheelchair accidents occurring during normal or emergency driving. Furthermore, our study points to the need for 4 wheelchair tiedowns and occupant restraints under forward facing driving conditions.
-
Cleveland-Clinic, Progress Report: Personal mobility aid securement and passenger restraint on transit vehicles. 1994, The Cleveland Clinic Foundation, Invacare Corporation: Cleveland.
-
Van Roosmalen, L., et al., Preliminary evaluation of wheelchair occupant restraint system usage in motor vehicles. Journal of Rehabilitation Research and Development, 2002. 39(1).
-
Hardin, J.A., C.C. Foreman, and L. Callejas, Synthesis of securement device options and strategies. 2002, National Center for Transit Research (NCTR): Tampa. p. 74.
-
Shaw, G., Wheelchair rider risk in motor vehicles: A technical note. Journal of Rehabilitation Research and Development, 2000. 37(1): p. 89-100.
-
Leary, A. and G. Bertocci. Design criteria for manual wheelchairs used as motor vehicle seats using computer simulation. in RESNA Annual Conference. 2001. Reno, NV.
-
Mercer, P.W. and J.R. Billing, Asessment of a transportable mobility aid in severe driving conditions-An exploratory test. 1990, Vehicle Technology Office Transportation Technology and Energy Branch: Ontario. p. 1-53.
- Wheelchair Stability Testing. 1995, Cleveland Clinic Foundation: Cleveland. p. 1-11.
-
Adams, T.C., et al. Wheelchair user stability during simulated driving maneuvers. in Resna Annual Conference.
-
SAE, Wheelchair tiedowns and occupant restraints (WTORS) for use in motor vehicles. 1996.
-
ANSI/RESNA, ANSI/RESNA WC-19: Wheelchairs Used as Seats in Motor Vehicles. 2000, American National Standards Institute (ANSI)/Rehabilitation Engineering Society of North America (RESNA).
ACKNOWLEDGEMENTS
This research was conducted with support from a NIH SBIR grant # R43 HD39567.
Opinions expressed are the authors' and do not necessarily represent the opinions of the funding agency.
Linda
van Roosmalen, PhD,
University of Pittsburgh
Dept. of Rehabilitation Science and Technology
5034 Forbes Tower
Pittsburgh, PA 15260
email: Lvanroos@pitt.edu