FIRST STEP ON THE DRIVING SIMULATOR FOR PERSONS WITH DISABILITIES
Shuh-Jing Benjamin Ying,
Stephen Sundarrao, and Rajiv Dubey
Department of Mechanical Engineering
University of South Florida
Tampa, FL 33620-5350
ABSTRACT
A `dynamic motion seat' had been donated to us three years ago from Reflectone The seat is consisted of three actuating cylinders. It can carry a load of 600 lb and produce motions of pitching, rolling and heave. This is an ideal device for building a driving simulator. The mechanism of the dynamic motion seat is very similar to the original design concept of the National Advanced Driving Simulator developed by University of Iowa. With the available of the seat we can build a driving simulator for training persons with disabilities at much cheap price. However when the seat was taken out from cradle it was not working. Through our effort in the past year, the electronic parts are repaired and it is working now. Details are reported in this paper.
BACKGROUND
When Reflectone (the name of company has been changed to CAE USA Inc.) bought the dynamic motion seat from DDL of UK, their original intention was to use it in theaters to let tourists to experience the dynamic motions as the surrounding scenery changes. Our primary purpose of this project was to evaluate the use of a low cost simulator to provide dynamic conditions for during assessment of driving performance of an individual with a disability. Although there are some simulators available commercially, they are either not designed for an individual with a disability or are extremely expensive. As the seat was taken out of cradle, we looked into documents come with the seat and also looked into any physical damages due to shipping. Meanwhile, we also looked into references related to driving simulator. Many papers were found but only a few are mentioned below. M. E. McCauley et al reported the alternative design for the National Advanced Driving Simulator (NADS).(1) In the paper, the authors also mentioned the original design concept of the base for NADS. That is very similar to the dynamic motion seat. Therefore, the possibility to convert the dynamic motion seat into a driving simulator is really existing. On the other hand, it is found that the cost of NADS was estimated at $32 million as given in the report by General Accounting Office(2). Because the seat is donated to us, our estimated cost may be only a few percent of that. The main effort we need to do is the computer software. The cost for that is also only a fraction of that for NADS software that cost $3.7 million as reported by the General Accounting Office(B-248570.3) (3)
RESEARCH QUESTION
The objective of this project obviously is to convert the dynamic motion seat into a driving simulator for training disabled persons to drive. Because the conditions of disabled person can be so much different from one to another, it is not efficient to train disabled persons in real cars. In view of the development of NADS, we realize that this is a huge project. Then the questions here are how can we carry it out step by step to reach our goal. The steps what we planned are:
METHOD
The physical damage of the whole system was minimum as we set up the dynamic motion seat first time in our laboratory. Only one circuit board was broken into two pieces. Fortunately our research Assistant John Dhanraj from EE department could repair it without much difficult.
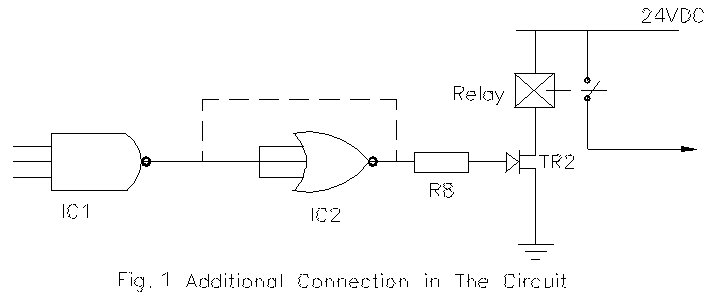
However, as we connected all the parts according to our best knowledge, the system was not working. First, we discovered that the relay for power supply of 24 vdc was not working. Then just for the purpose of testing, the relay was replaced by a switch. With the switch, the system was working properly, but this is only for testing. Then more detailed testing is performed on the relay. And to our surprise the relay is working normally. Further study revealed that the negative terminal of the relay could never reach ground because the transistor TR2 (JFET) would never be turned on under the present circuit. The problem was finally solved by shorting one NOR gate, connecting #10 of IC1 to #10 of IC2. The detail of this change is shown in the following diagram. The doted line means the additional connection. This is a part of circuit diagram P117/180 of DDL.
With this change made in the circuit board of the power supply, the system was working normally but only for a very brief time.
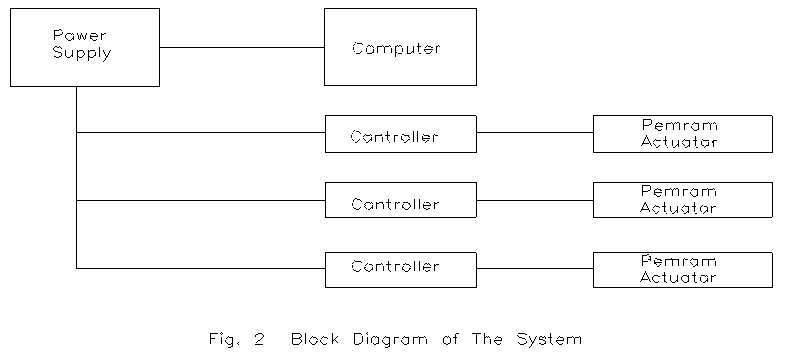 To understand the system better let us study the following block diagram.
To understand the system better let us study the following block diagram.
The actuators are of electro magnetic type. Its power is supplied through a controller and the controller operation is governed by a computer. The actuator is called pemram. After the dynamic seat working briefly, the fuse in the power supply was often broken. After studying the circuit diagram thoroughly, and with the indication of warning light, we finally discovered the faulty parts. The parts replaced in one controller are IC1 and Q2 in Drawing P117/150. The original part for IC1 is UC3843 replaced with equivalent NTE7097 and the original part for Q2 is IRFP250 replaced with equivalent MOSFET NTE2376. In the spare controller, additional parts are replaced; IC5 is replaced by TC4011BP and D10 by UR3020. After these changes the system is now working perfectly.
RESULTS
With the electronic parts repaired, the dynamic motion seat is working normally with all the demonstration programs available in the computer. It can perform pitching, rolling, heaving, and sine wave motions etc. It is fun to watch the movements. However this is only the first step of our project. Many serious tasks are to be overcome as being discussed in the next paragraph.
DISCUSSION
The motions of driving simulator are expected to precise. The reactions due to inertia under accelerations of the car are real and specific. In principle, if the existing programs can be modified, the work of second step can be accomplished easily. Unfortunately the existing programs are operated under the executive mode. We do not have the complete computer software from the original company, DDL of UK. And that company claimed bankrupt shortly after Reflectone bought the dynamic motion seat. That means that to make the simulator to work according to our desire, we must develop the computer software completely by ourselves. Therefore, the remaining task is really tough. Furthermore, we hope to develop interfaces between PhanTom, EMC AEVIT and similar powered primary and secondary driving controls.
ACKNOWLEDGMENTS
This study is funded by Florida Department of Education / Division of Vocational Rehabilitation grant # A2721.
Shuh-Jing Benjamin
Ying
Department of Mechanical Engineering
University of South Florida
Tampa, FL 33620-5350
813-974-5627, 974-3539 (fax)
ying@eng.usf.edu