Design of a Spring Mechanism Retractable Training Cane
ABSTRACT
The touch technique is a common method for navigation with a long cane for visually impaired individuals. However, detecting drop-offs with this method may be difficult for new users and create an intimidating situation during training. A remotely retractable, spring mechanism cane was designed and prototyped to simulate drop-offs. The prototype was able to retract with minimal noise and recoil disturbance, suggesting it may be suitable for drop-off simulation. More design improvements could be made to cane to make it compact and offer a weight balance closer to that of traditional long canes.
KEYWORDS
Visually impaired, long cane, drop-off detection
BACKGROUND
Visually impaired persons often navigate through their environment with a long cane. One common method of using a long cane to detect drop-offs and objects is the touch technique. The touch technique as described by Hill and Ponder (1) is that the cane is held with the thumb on top and finger wrapping around the bottom of cane grip and user's wrist is positioned on the body midline. The cane is used to sweep an arc that extends one inch beyond the users' shoulders. The cane is tapped on the ground at the left and right extremes of the arc and the user's foot should replace the location of the cane contact. The users should follow this pattern in a rhythm to navigate their environment.
A study by Smith et al (2) concluded from an open-ended survey of persons with low vision that drop-offs were the most difficult obstacle to detect. A study on the kinematics of gait and long cane use by Johnson et al (3) suggests that extending the cane arc beyond the shoulders can leave the visually impaired vulnerable to drop-offs in the environment. Wall and Ashmead (4) conducted a study where inexperienced, blind folded, unimpaired individuals where taught the touch technique and aspects of their performance were recorded over 8 sessions. It demonstrated that the new users tended to extend the cane arc beyond the width of their shoulders.
Hill and Ponder (1) noted that when teaching a new long cane user the environment should be non-threatening, and contain as few variables as possible. It can be reasoned from the mentioned studies (2,3,4) that new users could be vulnerable to drop-offs, creating a threatening situation while practicing drop off detection.
RESEARCH QUESTION
The goal of this design was to develop a remotely retractable cane suitable for training the visually impaired in curb drop detection. The concept is that abrupt shortening of the cane can simulate a curb drop to create a less threatening, safer learning environment for the trainee. The use of the retractable cane would eliminate the actual drop-off, reducing the number of variables in the situation, thus allowing the trainee to focus on technique. The overall design specifications were to maintain the size, weight, balance, and feel of a normal cane, while being retractable. The cane must have the ability to be remotely retracted six inches and have an extended length of 50 inches. The diameter of the shaft of the cane should not exceed 0.5 inch and the motor be battery operated. Noise and vibration should be minimized as not to provide the trainee with additional clues that the cane has been retracted.
METHOD
In order meet the design specifications; a spring in tension concept was employed as a means of retracting the end of the cane. The idea was that the extend part of the cane was connected to a long shaft, by a spring and the spring was held in tension by a trigger. The trigger holds the cane in its extended position until the trigger is released and the cane retracts. The primary components of the retraction mechanism are the cane shaft, cane extender, spring, and trigger.
A standard aluminum long cane was used as the shaft for the retractable version. The long cane's inner diameter provided enough clearance for a 3/8 inch diameter shaft to retract inside it. The cane extender was made from solid 3/8 inch diameter round stock 11 inches long. Three inches from one end of this piece a notch was turned to act as latching point for the trigger. An attachment for the spring, a long elastic chord, was also drilled on this end of the cane extender.
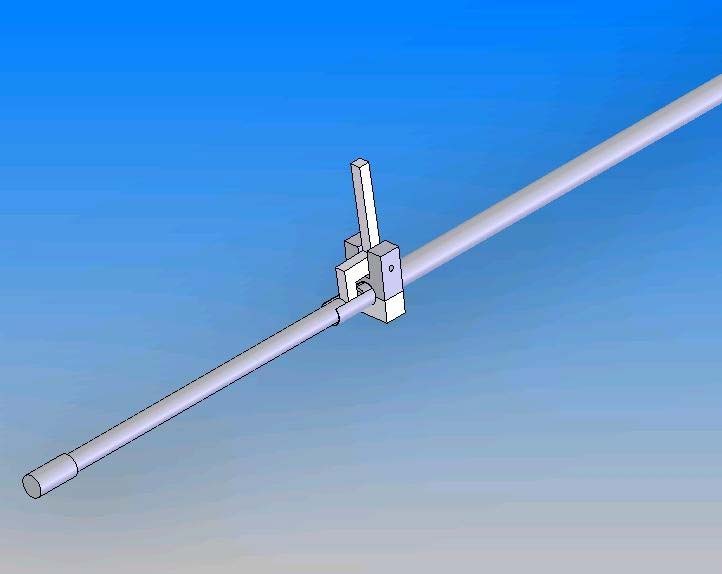
The trigger was milled from aluminum and consisted of three pieces. Two of the pieces formed a clamp and base for the rotating part of the trigger. The rotating portion of the trigger was a modified L with the short leg securing the cane extender, a pivot on the bend, and the long end serving as a lever. A two inch slot was milled in one end of the shaft to allow clearance for the trigger. A stop was added to the cane extender to limit the cane retraction to six inches. The stop consisted of a hollow cylinder screwed to the cane extender and a foam dampener with nylon washers on either end. A hollow, tapered handle was turned out of plastic and screwed to the other end of the shaft, which was cut the desired length.
The three primary components, the shaft with the handle, the cane extender, and the trigger were assembled. First the elastic cord was fixed to the cane extender and it was placed inside the shaft with the elastic cord threaded through the shaft. The cane extender was moved to its retracted position and the elastic cord was pulled till it was lightly strained. The elastic cord was fixed in this position with the attachment near the shaft-handle joint. At that point the cane could be extended, locked in place with the trigger, and released manually.
 |
The final step was to add the remote triggering system. A commercially available remote control DC motor system was employed to activate the trigger. The system consisted of a motor with a short arm on the drive shaft, a receiver, and a transmitter. Custom clamps were machined to attach the motor and the receiver to the shaft of the cane, close to the handle end. The batteries to power the 5V motor were concealed inside the handle and the connecting wires was fished through the inside of the shaft. A long thin metal rod was used to link the arm of the motor to the lever of the trigger. Upon completion of this step the cane could be remotely retracted. Follow initial tests a friction brake was added to the shaft to help decelerate the cane extender while it was retracting.
RESULTS
The design resulted in cane that was able to retract six inches. The remote control and motor system reliably executed the retraction. Accidental retraction of the cane did not occur while sliding or tapping the ground.
DISCUSSION
The training cane had many design features that focused on reducing the noise and disturbance caused by rapid retraction. The initial design of the training cane utilized a metal spring to retract the cane extender. However, it was soon realized that when the metal spring recoiled the inertia of the spring caused a disturbance that could be sensed while holding the cane. In addition, the spring vibrated against the aluminum shaft following recoil, resulting in enough noise to clue the user that the cane had been retracted. To remedy these problems, the spring was replaced with an elastic cord, which had significantly less mass than the spring, greatly reducing the disturbance during retraction. The elastic cord did not have noise associated with vibration against the shaft, in contrast to the spring. Experimentation with the elastic cord revealed the tension could be adjusted within a small range by varying the preloaded tension of the cord when the cane extender was in its retracted position.
Once the problems with the spring had been solved it was apparent that a noticeable noise and disturbance could be detected when the stop on the cane extender impacted with the end of the shaft. The original stop design featured the metal cylinder and a rubber O ring. After experimentation with different types of dampening systems for the stop, it was determined that slowing the cane extender during retraction would be a better solution to the problem. Since the tension reduction in the elastic cord was limited, a friction brake was added to slow the cane extender. Three different materials were tested as possible braking surfaces: wood, nylon, and leather. The leather yielded the most consistent results and appeared to sufficiently resist wear. The addition of the friction brake significantly reduced the noise and disturbance during the stop impact. Lastly, the foam, sandwiched by nylon washers was added to the stop to eliminate the remaining metal on metal clicking sound that occurred on impact.
Overall the spring mechanism and the remote controlled motor proved to be reliable and effective. The motor could be moved slowly, resulting in little noise and vibration. The motor and receiver were mounted closer to the handle to balance out the additional weight at the tip of the cane. Although the design criteria of remote retractability, length dimensions, and noise and disturbance minimization were met, future work could be done to improve the design. The overall weight of the cane is greater than that of a normal long cane. Despite an effort to balance the cane, it was still tip heavy. Finally, a better effort could be made to make the electronics more compact and concealed.
REFERENCES
- Hill E, Ponder P, Orientation and Mobility Techniques: A Guide for the Practitioner. New York: American Foundation for the Blind, 1976.
- Smith AJ, De l'Aune W, Geruschat DR, Low Vision Mobility Problems: Perceptions of O&M Specialists and Persons with Low Vision. Journal of Visual Impairment & Blindness 86(1): 58-62.
- Johnson JT, Johnson BF, Blasch BB, De l'Aune W, Gait and Long Cane Kinematics: A Comparison of Sighted and Visually Impaired Subjects. Journal of Orthopedic & Sports Physical Therapy 27(2): 162-166.
- Wall RS, Ashmead DH, Changes in Biomechanical Features of the Two-point Touch Technique as It Is Learned. Journal of Visual Impairment & Blindness 96(12): 829-841.
Author Contact Information:
Garrett G. Grindle,
Human Engineering Research Laboratories,
7180 Highland Drive 151R-1,
Pittsburgh, PA 15206,
Office Phone (412) 356-4850
EMAIL: ggg3@pitt.edu