ABSTRACT
The detrimental results of whole-body vibrations, and their effects on humans (i.e. low-back pain) in the seated position have been well documented. The goal of this research was to develop a device capable of measuring forces and moments during electric powered wheelchair driving, to evaluate the effectiveness of suspension powered wheelchairs. A SMART HUB was developed first using computer aided design and then manufactured. Preliminary calibration testing was done to determine the calibration constants in the z and y-axes. Results showed excellent fit in the z-axis and a very good fit in the y-axis. More extensive testing is required to complete the calibration however the results so far a promising that a reliable device has been developed to calculate forces experience during powered wheelchair propulsion.
KEYWORDS
Wheelchairs, Vibration, Low-Back Pain
BACKGROUND
The detrimental results of whole-body vibrations (WBV), and their effects on humans in the seated position have been well documented [1,2]. Some of the disorders that have been acknowledged as a result of WBVs, are muscle aches, spinal deformities, motion sickness, and most prevalent low-back pain. Although wheelchair users are regularly subjected to whole-body vibrations little research has been conducted to assess these vibrations or attempt to reduce them [3].
Cooper et al [4] showed that electric powered wheelchair users are active in their wheelchairs most of the day, predominantly between the hours of 7:00 AM and 10:00 PM. Upon further examination of the results, an average of 2.3 hours during this time was spent driving at an average speed of 0.5 m/s. The ISO standard on the Effect of Exposure to Vibrations on Humans, defines an exposure limit of WBV for a seated human throughout an eight hour period. It is important to evaluate the level of WBVs during power wheelchair driving to determine if users are exposed to harmful levels.
To date, minimal research has been conducted evaluating vibration exposure caused during electric wheelchair propulsion. Cooper et al [5], in an evaluation of interlocking sidewalk surfaces, determined that during propulsion over a newly paved, standard sidewalk surface the exposure limit for a powered wheelchair traveling at 2 m/s was only 2.4 hours.
RESEARCH QUESTION
The goal of this research was to develop and calibrate a unique device capable of measuring the ground reaction forces and moments during electric powered wheelchair (EPW) driving and retrofit to most available EPWs. The development of this device will help to evaluate the effectiveness of EPWs, specifically suspension EPWs, at reducing the vibrations transferred to the wheelchair user.
 |
|---|
METHOD
The development of the SMART HUB was based on current technology in use at the Human Engineering Research Laboratories. Before machining, Computer Aided Designs (CADs) were created using FeatureCAM to ensure accurate viability, design and construction.
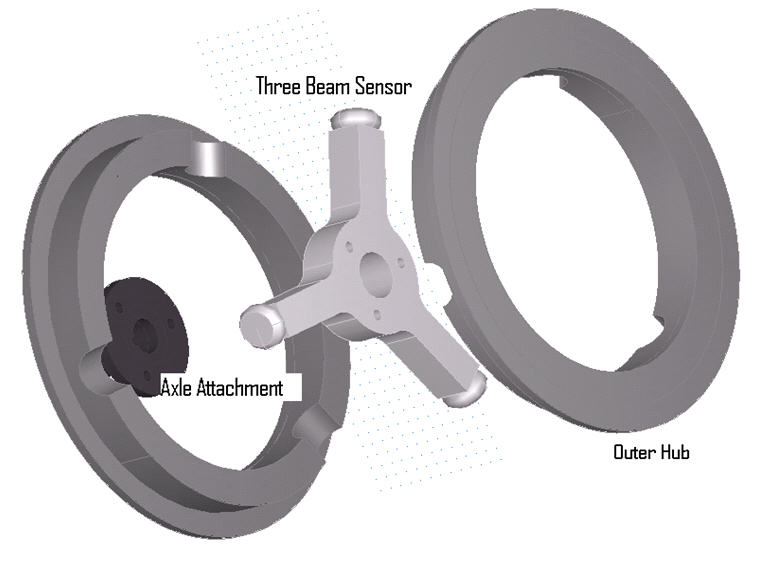
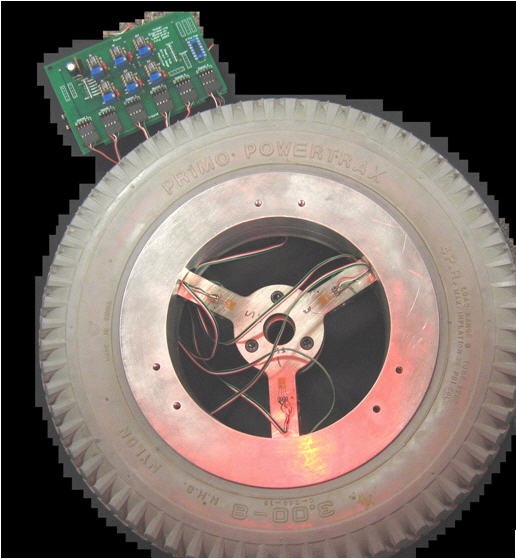
The core sensor of the SMART HUB is constructed of titanium (Grade 5 6AL-4V), and has three beams mounted with general purpose, stress analysis strain gauges (Micro Measurements, EA-06-125PC-350). The mechanical properties of titanium allow for maximum strength as well as beam flexibility. Three beams were chosen as the minimal amount, to still allow for force and moment measurement in three directions. The outer hub of the device is constructed of aircraft aluminum (6061T6), for its strength and lightweight. As seen in Figure 1, the ends of each beam in the core sensors are rounded and polished to slide within a carbide bushing at the interface with the outer hub. This ensures a very low friction environment to reduce error and hysteresis. The SMART HUB is designed to use a 14-inch solid foam insert tire. The SMART HUB is designed to connect to an electric power wheelchair via an axle attachment. This design allows for use on any electric powered wheelchair, because a specific axle attachment can simply be created.
 |
|---|
The Tattletale 8v2 data logger is used to collect the strain gauge data from the SMART HUB . This data logger has 1 MB of memory, and is capable of a maximum of 16 MHz processing speed. An amplifier board was designed to preprocess the strain gauge data running to the data logger. The board amplifies each of the six strain gauge channels, and increases the resolution of the signals being collected.
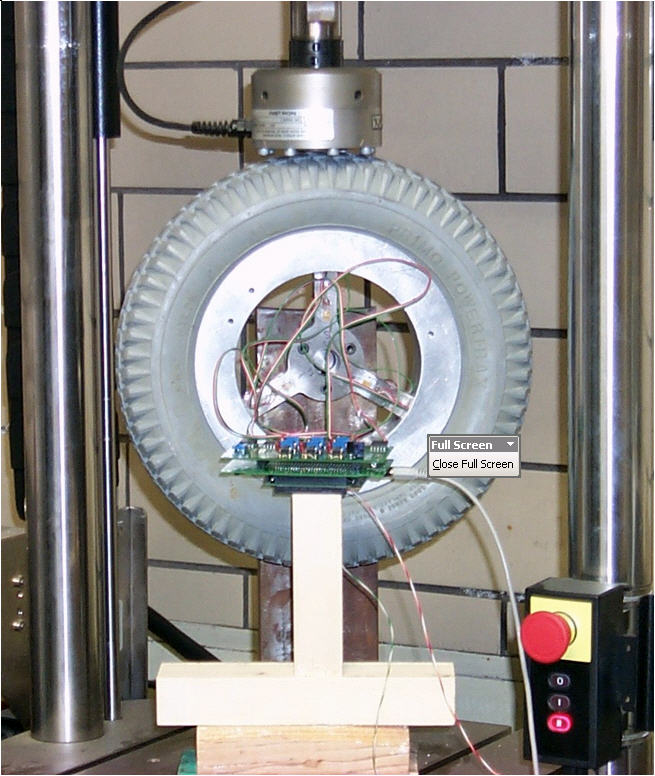
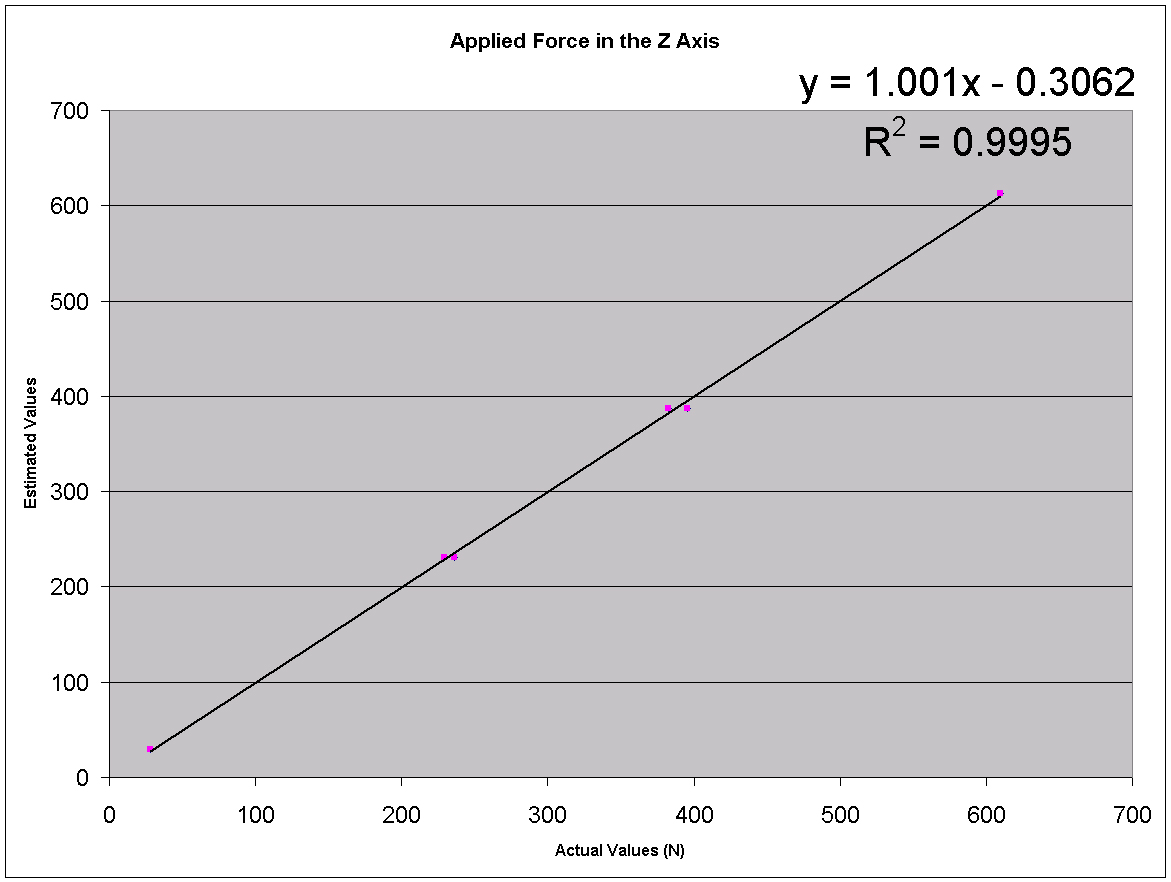
Static calibration was conducted on the SMART HUB in the z-axis by systematically placing calibrated weights on the axle attachment of the SMART HUB . Weights were added in ascending order, and retracted in the same order one at a time to measure the effects of hysteresis. Calibration in the x and y axes was conducted using an Instron Servohydraulic Fatigue System with a 10 kN load-cell, to load the SMART HUB .
RESULTS
 |
|---|
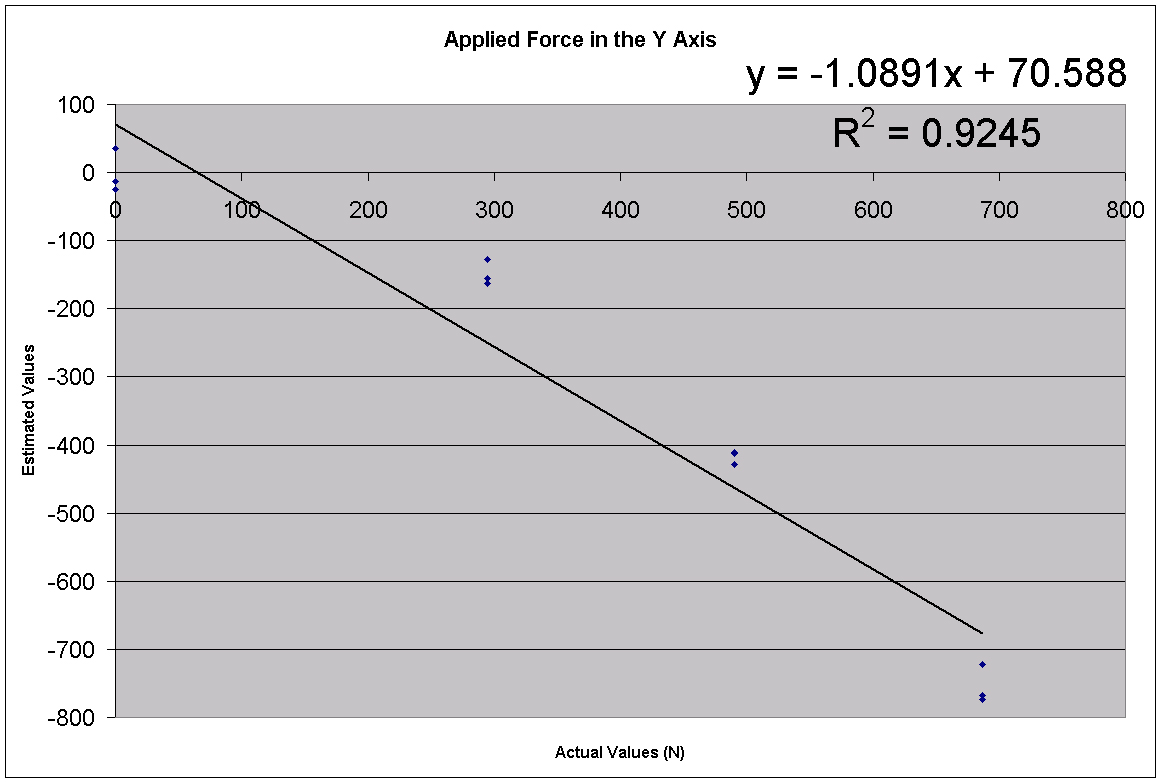
Regression analysis with Matlab was used to determine the calibration constants for the SMART HUB . A best-fit value was determined for each constant and the estimated forces were returned for the y and the z axes (the axes in which forces were applied). The results found were promising for preliminary testing and proved the design to be acceptable however more extensive testing is needed.
DISCUSSION
The activities of daily living of an electric powered wheelchair user include propulsion over obstacles and surfaces that result in exposure to harmful whole-body vibrations. The exposure to WBVs can consequently cause secondary injuries such as low-back pain and musculoskeletal complications [2,3]. Knowledge about forces and moments during electric wheelchair propulsion is also important for aid in wheelchair design.
 |
|---|
 |
In recent years, technology from industries that have been forced to deal with the exposure to WBVs to reduce injury (such as automotive, construction and farming [2]), has been adopted by assistive technology companies and incorporated into their development of wheelchairs. It has not, however, yet been determined whether these methods are effective at attenuating the amount of vibrations that are transferred to the user or increasing the durability and life of the wheelchair.
The results of the preliminary calibration of the SMART HUB show successful construction of a device capable of measuring ground reaction forces and moments during electric powered wheelchair propulsion. For future application this device will be used to evaluate the effectiveness of suspension used in EPWs. The clinical relevance of this research will be to compare wheelchairs and suspension settings to determine if differences exist. This may aid in wheelchair prescription and hopefully reduce secondary injuries and maintain health of by EPW users.
REFERENCES
- Dieckmann, D.A study of the influence of vibration on man, Ergonomics, Vol 1, 1957; 347-355
- Seidel, H. and Heide, R. Long term effects of whole-body vibration: a critical review of the literature, Int Arch Occup Environ Health, Vol 58, 1986; 1-26
- Griffin, M.J. Handbook of Human Vibrations, Academic Press Inc., San Diego CA 1990 pgs 173-186
- Cooper, R.A. Thorman, T. Cooper, R. Dvorznak, M.J. Fitzgerald, S.G. Ammer, W.A. Songfeng, G. Boninger, M.L. Driving Characteristincs of electric powered wheelchair users: How far, fast and often do people drive? Arch Phys Med Rehabil, Vol 83, 2002; 250-255
- Cooper R.A. Wolf, E.J. Fitzgerald, S.G. Dobson, A. Ammer, W.A. Boninger, M.L. Cooper, R.Evaluation of selected sidewalk pavement surfaces, Ergonomics, IN REVIEW.
ACKNOWLEDGMENTS
This study was funded in part by the U.S. Department of Veterams Affairs, VA Rehabilitation Research and Development Center (F2181C)
Erik J. Wolf, MS,
University of Pittsburgh,
7180 Highland Drive,
151R-1,
Pittsburgh,
PA, 15206
Phone: (412) 365-4850
Email: ejwst11@pitt.edu