29th Annual RESNA Conference Proceedings
A Fail-safe Myoelectric Controller for an Electric-powered Wheelchair
Isamu Kajitani and Tetsuya Higuchi
National Institute of Advanced Industrial Science and Technology (AIST)
AIST Tsukuba Center 2, Tsukuba, Ibaraki 305-8568, JAPAN, isamu.kajitani@aist.go.jp
ABSTRACT
In order to provide "self-produced locomotion" to severely-impaired persons, we are developing a myoelectric controller for an electric-powered wheelchair. The target users of the developed controller are someone who cannot use joysticks or switches to control the powered wheelchairs. The developed controller can be used as an alternative user-interface to such devices. In addition to showing the developed controller, this paper also proposes two fail-safe strategies for the myoelectric wheelchair controller.
KEYWORDS
Wheelchair, Myoelectric-signal, Fail-safe, Controller, Rehabilitation-Engineering
BACKGROUND
The most popular user-interface for powered wheelchairs is the joystick. However, control with a joystick does require hand manipulation, so this input-device is not suitable for all operators. For example, manipulating a joystick can be extremely difficult for someone who has poor hand mobility.
Accordingly, there are a number of research projects seeking to develop alternative input devices to the joystick. For example, Pires [1] have attempted to steer a wheelchair through voice commands, while Barea [2] have used EOG (Electrooculography) for wheelchair guidance.
T he myoelectric controller interprets myoelectric signals to produce some control-commands. The myoelectric signals are generated from contracted muscles and are detected with surface electrodes on the skin. The most notable advantage of using the myoelectric controller is its capacity to utilize the residual muscular functions of physically-impaired persons.
The myoelectric controller can operate in one of two different modes. The first is a switch mode, where each myoelectric signal channel has a threshold, and if the signal intensity exceeds the threshold, then the corresponding function will be activated. The second mode is a proportional mode. Although the motor for the activated function rotates at a constant speed in the switch mode, in the proportional mode, the motor rotates at a speed which is proportional to signal intensity.
The developed controller based on the technology of our myoelectric prosthetic hand controller[3]. Hardware specifications of the developed controller are shown in Table 1 and Figure 1 shows a photograph of the developed controller board.
| Microprocessor | H8/3664N (Renesas technology corporation) |
|---|---|
| Number of analogue input ports | 8 |
| Communication interface | RS-232C (Dsub-9) |
| Battery | 9V (006P) |
| Size of the board | 60mm X 55mm |
| Size of the controller box | 80mm X 70mm X 50mm |
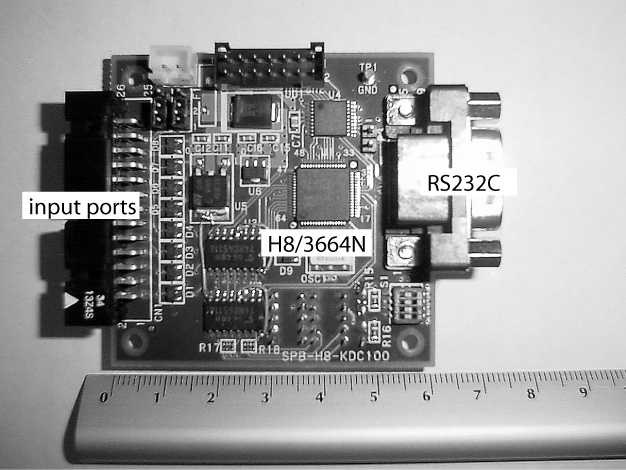 Figure 1: The developed controller board (Click image for larger view)
Figure 1: The developed controller board (Click image for larger view)In this paper, we used two analogue input channels---two channels of myoelectric signals--- and each input channels works in the switch mode . The control strategy can be specified with a PC (Personal Computer) by downloading a firmware program onto the processor chip. Therefore the operator can select their preferred method of control from prepared programs.
Each control programs is designed by using a finite-state-machine (FSM) [4]. The FSM is a computational model to determine system actions, which consists of a set of states and transition functions that map the input and the current state to the next state. The FSM can be expressed as an FSM-diagram. Figure 2 shows an example of FSM-diagram for controlling the powered wheelchair with two channels of input switches.
STATE OF PROBLEMS
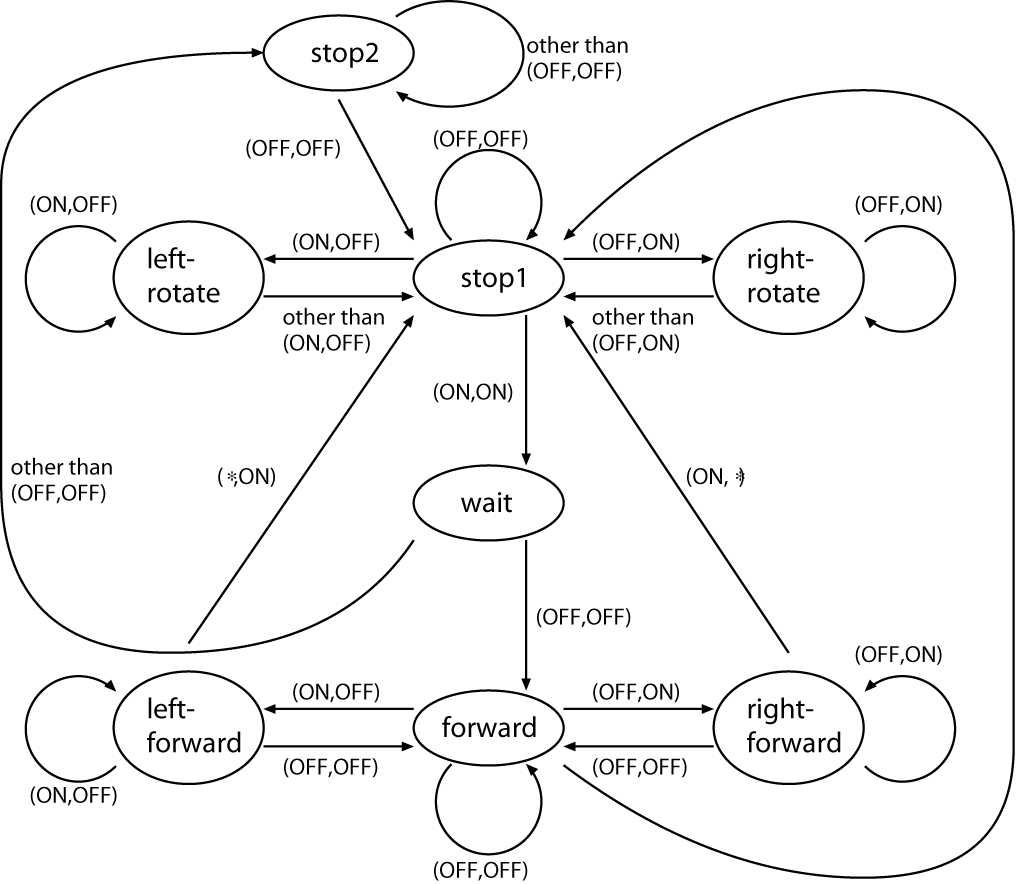 Figure 2: The example of the FSM dialog to control the wheelchair with two switch inputs d (Click image for larger view)
Figure 2: The example of the FSM dialog to control the wheelchair with two switch inputs d (Click image for larger view) While many works have focused on the technology employed in developing the alternative user-interface, they fail to pay appropriate attention for the safety of the operator. Through our experiments with the developed controller, we have identified two problems that may put the operator in some danger.
Firstly, the myoelectric signals are sometimes influenced by electrical noise, such as induced currents from commercial power supplies. This means that the myoelectric signal intensity may exceed the threshold, irrespective of the operator's intention to the contrary. This may result in unintended motion of the wheelchair.
Secondly, in some situations, it is difficult to stop the wheelchair motion with this controller. In stopping the wheelchair motion with the switch mode, there are two possibilities. One is activating the switch for stopping; the other is deactivating the switch for operation. However, in the case of severely-impaired persons, because of limited physical mobility, it is not always possible to install the switch for stopping. Deactivation of the switch for operation is also difficult in some situations, such as noise-influenced cases or emergency cases, where the operators tend to contract their muscle unconsciously.
APPROACH
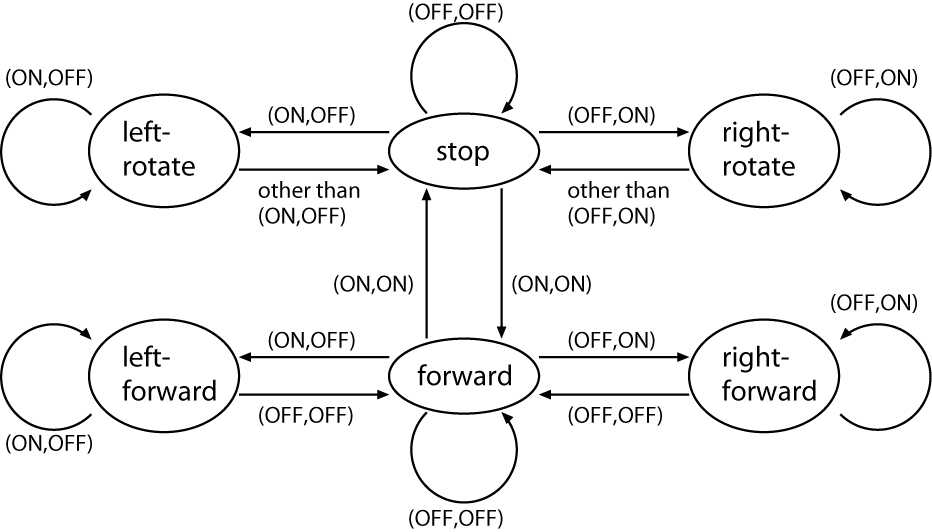 Figure 3: The example of the FSM dialog to control the wheelchair with proposed fail-safe strategies. (Click image for larger view)
Figure 3: The example of the FSM dialog to control the wheelchair with proposed fail-safe strategies. (Click image for larger view) In order to avoid these two problems, this paper proposes two "safety-first" fail-safe strategies. In order for easy understanding, these methods are explained by using the FSM-diagram in Figure 3. Differences between the FSM-dialog in Figure 2 and 3 are the inclusion of "wait" and "stop2" states and the state-transfers to the "stop1" state from both the "left-forward" and the "right-forward" states.
The transition function to the "wait" state operates under the following condition: if the switch setting has the value (ON,ON) for at least 0.5 seconds and changes to (OFF,OFF) within two seconds, then the state transfers to "forward", otherwise the state transfers to the "stop2" state. With the inclusion of the "wait" state, the first problem can be avoided, because if the switch is being continuously retained in (ON,ON) setting due to noise interference, then the state will transfer to "stop2", and will not return to the "stop1" state until the switch setting becomes (OFF,OFF) .
The state-transfers to the "stop1" state from both the "left-forward" and the "right-forward" states ensure that the second problem is avoided, without increasing the number of switches or deactivating the switch for operation. During either "left-forward" or "right-forward" wheelchair movements, if the operator wants to stop immediately, this now only requires the one procedure of tensing both legs, which will cause the switch setting to be (ON,ON) and causes a state transfer to the "stop1" state and stops the wheelchair.
The inclusion of the state-transfers to the "stop1" state has one more advantage. Without these state-transfers, stopping the wheelchair from "left-forward" or "right-forward" requires two steps; firstly transferring to "forward" then to "stop1".
In order to assess this, we measured the time required to stop the wheelchair from either the "left-forward" or the "right-forward" state. The time measured was the time that elapsed from the moment when the operator intended to stop the wheelchair until the point when the wheelchair speedometer indicated a speed of 0km/h. In the experiment, the speed of the wheelchair during the "left-forward" and "right-forward" motions was set to 0.6km/h. The average time (over ten trials) required to stop the wheelchair was 1.85 seconds (SD = 0.22).
Then, the time required to stop the wheelchair with the fail-safe strategy was also measured. As the average time (over ten times) was only 1.02 seconds (SD = 0.11), these experiments clearly show that the fail-safe strategy is effective, reducing the time required by around 55\%.
CONCLUSION AND FUTURE WORKS
This paper has described the development of the myoelectric controller for the powered wheelchair, which incorporates the fail-safe strategy to endure the operator's safety. The main target users of this application are severely-impaired persons, who have difficulty in manipulating a joystick or switches. The developed controller is expected to enable such impaired persons to operate the wheelchair by themselves, providing them with "self-produced locomotion". This controller is now taking some clinical evaluations by operator with muscular dystrophy .
REFERENCES
- Pires, G., Nunes, U., "A wheelchair streered through voice commands and assisted by a reactive fuzzy-logic controller" J. of Intelligent Robotics Systems, 34, 301-314, 2002.
- Barea, R., Boquete, L., Mazo, M., Lopez, E., "Wheelchair guidance strategies using EOG" J. of Intelligent Robotics Systems, 34, 279-299, 2002.
- Kajitani, I., Higuchi, T., "Developments of myoelectric controllers for hand prostheses" proceedings of the Myoelectric Controls Symposium, 107-111, 2005.
- Brand, D., Zafiropulo, P., " On Communicating Finite-State Machines " Journal of the ACM, Vol.30-2, 323-342 , 1983.
ACKNOWLEDGMENTS
This study was supported by a grant from the Ministry of Education, Culture, Sports, Science and Technology, Japan
This should be in the right column.