29th Annual RESNA Conference Proceedings
Is There a Best Way to Follow-Through Between Pushes?
W Mark Richter1,3, Russell Rodriguez2,3, Kevin R Woods2,3 and Peter W Axelson3
1MAX mobility, Nashville TN 2Tennessee State Univ., Nashville TN, 3Beneficial Designs, Minden NV
ABSTRACT
The path of a wheelchair user's hands is not constrained between pushes. There have been four hand trajectories classified and studies that suggest there may be advantages to one over another. This study investigated recovery patterns during propulsion on a research treadmill for both level and uphill conditions. Propulsion biomechanics were measured using an instrumented wheel and motion-capture system. Only three of the four recovery patterns were observed. Recovery patterns were fairly balanced for level propulsion but the ARC pattern became most popular once subjects began pushing uphill. There were no biomechanical differences found between the recovery patterns. Choice of hand trajectory may be more influenced by maintaining control and balance of the wheelchair than by biomechanical factors.
Keywords:
Wheelchair, Propulsion, Biomechanics, Recovery Pattern, Technique, Uphill
BACKGROUND
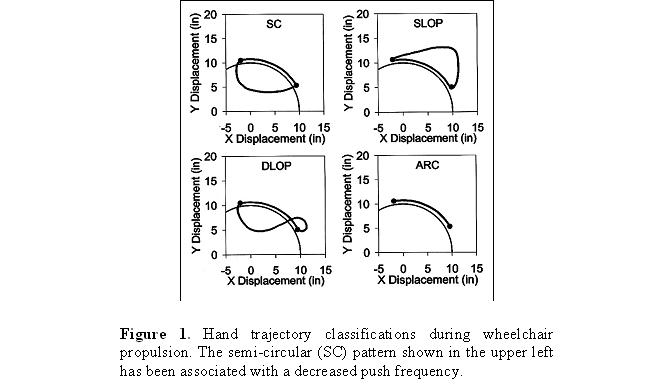 Figure 1. Hand trajectory classifications during wheelchair propulsion. The semi-circular (SC) pattern shown in the upper left has been associated with a decreased push frequency. (Click image for larger view)
Figure 1. Hand trajectory classifications during wheelchair propulsion. The semi-circular (SC) pattern shown in the upper left has been associated with a decreased push frequency. (Click image for larger view)
When pushing, the user's hands are forced to follow the path of the handrim. However, between pushes users can choose how they want to move their hands while preparing for the next push. A variety of different hand trajectory patterns have been classified during the recovery phase of the propulsion cycle, including semicircular (SC), single looping (SLOP), double looping (DLOP) and arcing (ARC), shown in Figure 1. [1] While it is not understood why users implement different strategies during recovery, it has been suggested that one path may be the best to use. In a study of 38 manual wheelchair users, Boninger et al . found that those users who utilized the SC trajectory exhibited a reduced push frequency and an increased push time to recovery time ratio. [2] Based on the results of this study, the Clinical Practice Guidelines for the Preservation of Upper Limb Function following Spinal Cord Injury recommends that wheelchair users implement the SC pattern during everyday propulsion. [3]
However, there is evidence in the literature that may call this recommendation into question. In a study performed using inexperienced wheelchair users, metabolic demand was measured during propulsion for each of the various recovery patterns. [4] The ARC pattern was found to be more metabolically efficient than SC pattern, suggesting that reducing push frequency and maximizing metabolic efficiency may be competing interests. Both of these studies were done on ergometers, which simulate pushing on a level surface. With ergometers, the wheelchair is tied down on top of rollers, so the wheelchair is stationary and does not move when pushing. It is unclear whether the results of these studies translate to everyday wheelchair propulsion; where not only does the wheelchair move but is also used to push over challenging terrain like side slopes and hills.
RESEARCH QUESTION
Is there a best way to follow-through between pushes? To begin to answer this, we need to study propulsion biomechanics in a dynamic setting, one where balance and control play a role. We also need to study propulsion in challenging environments such as pushing uphill, where biomechanical demand on the user is the greatest. This study investigated the biomechanical outcomes resulting from dynamic propulsion over a range of environments using freely chosen hand trajectories.
METHODS
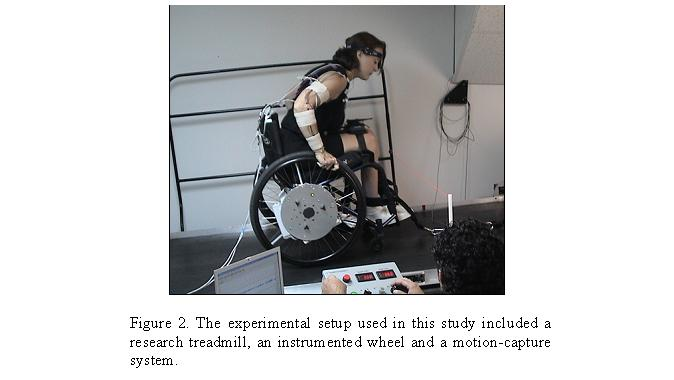 Figure 2. The experimental setup used in this study included a research treadmill, an instrumented wheel and a motion-capture system. (Click image for larger view)
Figure 2. The experimental setup used in this study included a research treadmill, an instrumented wheel and a motion-capture system. (Click image for larger view)
Full-time manual wheelchair users with full use of their arms and hands were recruited to participate in the study. All subjects read and signed an IRB approved consent form prior to participation. The subjects' rear wheels were replaced with appropriately sized instrumented test wheels. Upper extremity and wheel kinematics were measured using a 3D active marker motion capture system (Phoenix Technologies). Markers used in this analysis were placed on the wheel, sternum, head and the 3rd metacarpophalangeal (MP) joint of the users' right hand. The 3rd MP joint was used to measure the trajectory of the hand. Subjects propelled on a research treadmill at comfortable self-selected speeds for 35 pushes on level, 30 pushes on 3 degrees and 25 pushes on 6 degrees. The experimental setup is shown in Figure 2. The last 20 pushes from each grade condition were used for analysis. For each push analyzed, the peak force, push angle and push frequency were all determined. Individual push characteristics were then averaged over each 20-push set. Recovery patterns were identified as one of the four classifications: ARC, SLOP, DLOP or SC. Push speed, peak force, push frequency and push angle were all averaged within each of the recovery pattern groups. Recovery patterns were compared across environmental conditions using a mixed-model ANOVA for self-selected push speed, body-weight normalized peak force, push angle and push frequency. Differences were tested using equal-variance t-tests and determined to be statistically significant for p<0.05.
RESULTS
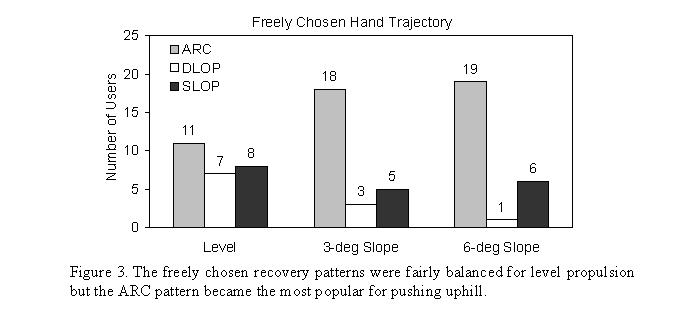 Figure 3. The freely chosen recovery patterns were fairly balanced for level propulsion but the ARC pattern became the most popular for pushing uphill. (Click image for larger view)
Figure 3. The freely chosen recovery patterns were fairly balanced for level propulsion but the ARC pattern became the most popular for pushing uphill. (Click image for larger view)
Twenty-six manual wheelchair users gave written consent and participated in the study. Seven of the subjects were female. The average age of the subjects was 36 years old (sd=11) and the average wheelchair experience was 17 years (sd=11).
Only three of the four possible recovery pattern classifications were observed in this study. None of the subjects used the SC pattern that is being recommended to wheelchair users in the clinical guidelines. [3] The number of subjects who use each of the remaining three classifications was fairly balanced for level propulsion, with the largest number of subjects using the ARC pattern (Figure 3). However, once the subjects began pushing uphill, many of the subjects who were not using the ARC pattern, began to use it. Nineteen of the 26 subjects were using the ARC pattern by the time they got to the steep slope. An example of a transitioning recovery pattern is shown in Figure 4 for one of the subjects who transitioned from the SLOP pattern to the ARC pattern.
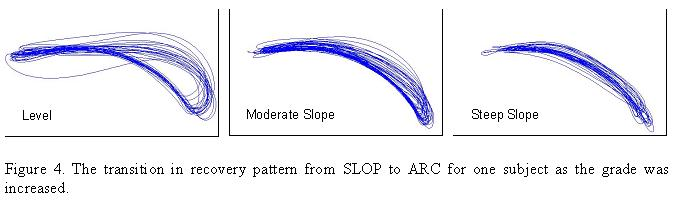 Figure 4. The transition in recovery pattern from SLOP to ARC for one subject as the grade was increased. (Click image for larger view)
Figure 4. The transition in recovery pattern from SLOP to ARC for one subject as the grade was increased. (Click image for larger view)
The resulting biometrics for each of the recovery patterns are given in Figures 5 through 8. None of the differences were found to statistically significant. The DLOP pattern was only used by one subject on the 6-degree grade and therefore could not be included in the statistical analysis. The ANOVA was repeated with a less stringent p-value requirement. Only four of the remaining 28 differences tested were found to yield p-values less than or equal to 0.15, further strengthening the finding that there are no statistical differences between the recovery patterns for the variables tested.
DISCUSSION
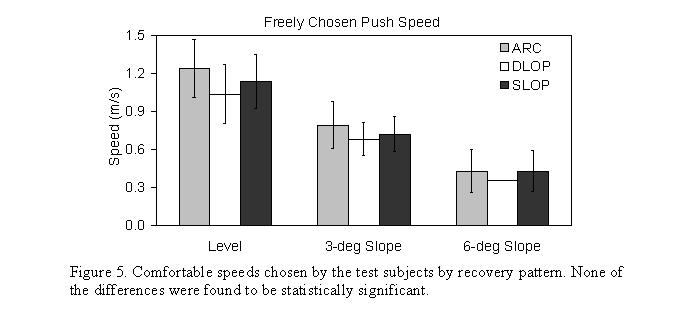 Figure 5. Comfortable speeds chosen by the test subjects by recovery pattern. None of the differences were found to be statistically significant. (Click image for larger view)
Figure 5. Comfortable speeds chosen by the test subjects by recovery pattern. None of the differences were found to be statistically significant. (Click image for larger view)
This study represents the first investigation of recovery patterns in a dynamic environment involving more strenuous propulsion conditions. The peak handrim forces were found to be over twice as high when pushing uphill than during level propulsion, emphasizing the importance of testing on hills. While recovery patterns were somewhat balanced for level propulsion, it became clear that for pushing uphill, ARC is the most popular pattern. Based on its popularity alone, it could be hypothesized to be the most biomechanically efficient. The ARC pattern having required less metabolic energy than did the SC pattern for simulated level propulsion would support this hypothesis. [4]
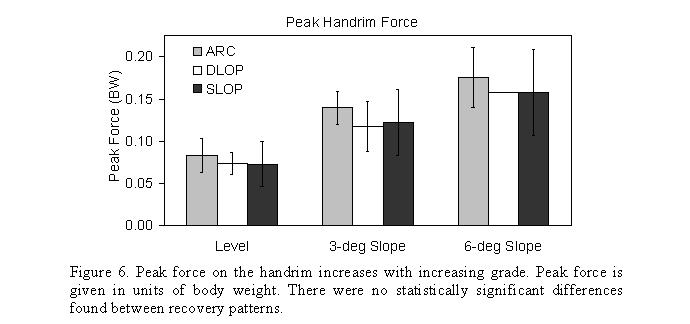 Figure 6. Peak force on the handrim increases with increasing grade. Peak force is given in units of body weight. There were no statistically significant differences found between recovery patterns. (Click image for larger view)
Figure 6. Peak force on the handrim increases with increasing grade. Peak force is given in units of body weight. There were no statistically significant differences found between recovery patterns. (Click image for larger view)
There may be reasons other than efficiency that draw users to the ARC pattern for pushing uphill. When pushing uphill, the user must maintain his balance and not tip backwards. In addition, with the user on a hill, missing a push could mean rolling backward down the hill. With the ARC pattern, the user's hands are close to the handrim, allowing him to make quick-response corrections. The SLOP pattern has a similar benefit in that the user's hands are above the handrim, allowing him to push down and grip the handrim relatively quickly. The DLOP pattern, much like the SC pattern puts the user at a disadvantage since his hands are well below the handrims and the arms need to be lifted up against gravity to make unexpected corrections.
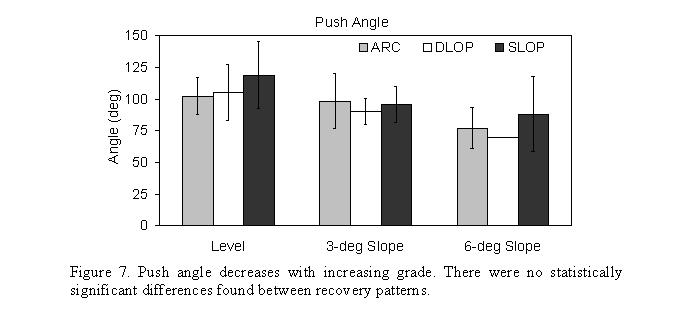 Figure 7. Push angle decreases with increasing grade. There were no statistically significant differences found between recovery patterns. (Click image for larger view)
Figure 7. Push angle decreases with increasing grade. There were no statistically significant differences found between recovery patterns. (Click image for larger view)
Previous research suggests that the ARC pattern results in more frequent shorter pushes. [2;4] Our not finding this trend may have been the result of testing in a dynamic environment, where the wheelchair was not constrained during propulsion. If this is the case, the results of the previous studies are not clinically applicable. However, the lack of differences could also be due to not constraining propulsion speed across test subjects. Future studies will investigate this effect.
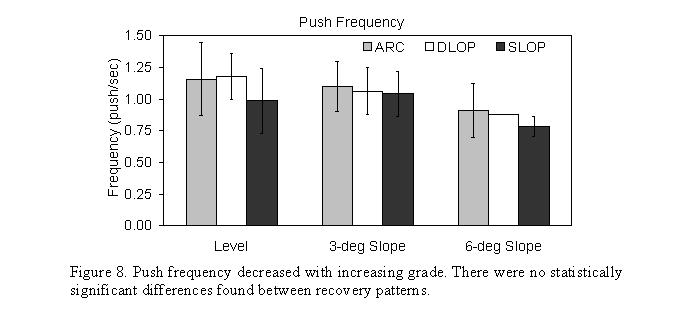 Figure 8. Push frequency decreased with increasing grade. There were no statistically significant differences found between recovery patterns. (Click image for larger view)
Figure 8. Push frequency decreased with increasing grade. There were no statistically significant differences found between recovery patterns. (Click image for larger view)
It is clear that we do not fully understand recovery patterns and need to do the fundamental research required to assess which if any minimize demand on the wheelchair user. Clinical professionals are cautioned against training wheelchair users to push with any particular recovery pattern until more is known about their consequences. A user's naturally chosen recovery pattern may turn out be the best solution for that particular individual, in that particular propulsion environment.
REFERENCES
- Shimada SD, Robertson RN, Boninger ML, Cooper RA. Kinematic characterization of wheelchair propulsion. J Rehab Res Dev 1998; 35: 210-218.
- Boninger ML, Souza AL, Cooper RA, Fitzgerald SG, Koontz AM, Fay BT. Propulsion patterns and pushrim biomechanics in manual wheelchair propulsion. Arch Phys Med Rehab 2002; 83: 718-723.
- Consortium for Spinal Cord Medicine. Preservation of Upper Limb Function Following Spinal Cord Injury: A Clinical Practice Guideline for Health-Care Professionals. PVA Publications 2005.
- De Groot S, Veeger HE, Hollander AP, Van der Woude LH. Effect of wheelchair stroke pattern on mechanical efficiency. Am J Phys Med Rehabil 2004; 83: 640-649.
ACKNOWLEDGMENTS
This research was co-funded by Beneficial Designs and the College of Engineering, Technology and Computer Science at Tennessee State University in Nashville, TN.
W Mark Richter
mark@max-mobility.com
Nashville TN
(615) 837-6947
This should be in the right column.