29th Annual RESNA Conference Proceedings
Upper Body Posture Comparison between Reverse and Conventional Manual Wheelchair Propulsion
Diana Rincon, Shusheng Ye, Manuel Rodriguez, Salim Nasser
Biomechanics Laboratory, Department of Mechanical and Material Engineering,
College of Engineering and Computing, Florida International University , Miami , FL33174, USA
ABSTRACT
Previous studies have demonstrated that conventional manual wheelchair propulsion (the pushing technique here referred to as forward wheelchair propulsion, FWP) imposes high demands on the cardiopulmonary and musculoskeletal systems of the user [1-2]. Our study focuses on a Reverse Wheelchair Propulsion technique (RWP), in which the user pulls on the hand rim to propel the wheelchair forward. The objective of the study is to compare upper body posture through kinematic analysis. In particular, angular deviations of the torso from the vertical as a measure of uprightness of posture and the distance between the shoulder and the neck as a measure of kyphosis (shoulder slouch) were compared.
Keywords:
Kinematics; reversed wheelchair propulsion
BACKGROUND
Manual wheelchairs are the preferred mode of transportation for those with physical limitations, due to their low cost and low maintenance requirements. Manual propulsion is also preferred whenever possible as a practical and accessible form of physical exercise that is compatible with the individual's life style for long-term exercise sustainability. But manual wheelchair propulsion has serious drawbacks. FWP impose high demands on the cardiopulmonary and musculoskeletal systems of the user [1-2]. The repetitive motion required in FWP makes users especially susceptible to injuries such as rotor cuff damage, lateral epicondylitis, and cubital tunnel or carpal tunnel neuropathies. Furthermore, a "slouched-over" posture is common in people who have been pushing their wheelchairs for long periods of time. Shoulder slouch, called kyphosis, is an extreme form of poor posture described by a rolling forward of the shoulders. Bad posture is highly correlated with pain. It is important to improve the posture of any person, but it is essential to do so for wheelchair users, who are at a higher risk of secondary health problems.
METHODOLOGY
Research Participants
This study enlisted 10 able-bodied adults who have given informed consent. The mean age (±SD) of the participants was 23.6 years (±3.6 years); all participants are right-handed, in good health and have no previous record of pathologies of the upper extremities. Manual wheelchair users were not chosen because they comprise a group with non-homogeneous abilities and are skilled in FWP, which would introduce bias in the data.
Experimental Setup
A rigid-frame manual wheelchair (Quickie) is secured to a roller of known moment of inertia. Three mini-DV digital cameras (JVC GR-DVL9800) are used to capture the kinematics of FWP and RWP at 60 fps. Two cameras, placed at 90 o from each other capture the views of the front and right side of the subject. A third camera, placed at 45° between the first two, is employed to capture markers that might be hidden from the previous two views. For the analysis of propulsion techniques and user posture, eight reflective sensors (markers) are placed on the subject: 3rd and 5th right dorsal metacarpal heads, distal radial and ulnar processes (wrist), lateral epicondyle of the humerus (elbow), most lateral aspect of the acromion (shoulder), jugular notch (base of neck), and C-7 vertebrae [4]. Two additional markers used to determine the angular velocity of the wheelchair are placed one on the axel of the wheel (the reference marker) and another on a spoke 15.75 cm away from the reference.
Test Protocol
During the test procedure, the subjects are asked to propel the wheelchair at a comfortable self-selected power level with at least ten minutes of rest between randomized propulsion sessions (between FWP and RWP). Each propulsion test is performed for a three-minute period with the camera system recording video for 30 seconds after 2.5 minutes from the start of each session in order to capture the motion of the reflective markers.
Data Processing
Digital videos are processed using the Ariel's Performance Analysis System (APAS) software. Marker velocity is extracted from the data by digitally deriving the marker displacement data. In particular, the displacement of the markers on the jugular notch and the 7th vertebrae are used to calculate the lean angle of the torso from the vertical. This calculation is based on the assumption that the hip is a stationary pivot point during the propulsion tests for a rigid body torso. The distance between the markers placed on the shoulder and jugular notch is calculated through the use of three-dimensional analysis to measure kyphosis. A shorter distance between the shoulder and the neck is evidence of increased kyphosis. Pure kinematic data provide estimates for power output based on the average angular velocity, ?, the moment of inertia, I, of the rotating components in set-up (the wheels, the roller, etc.), and the angular acceleration, a, from the deceleration curve of wheel and roller.
RESULTS
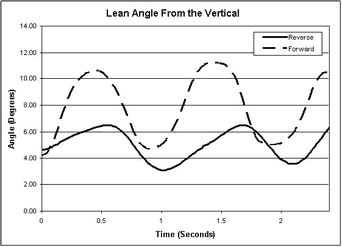 Figure 1 - Typical curves of torso lean angle from the vertical during FWP and RWP (Click image for larger view)
Figure 1 - Typical curves of torso lean angle from the vertical during FWP and RWP (Click image for larger view)
At a comfortable speed, research participants exhibited a lower angular deviation of the torso while pulling on the hand rim. Pushing is more physically demanding on the torso since it requires more leaning and at faster intervals (Figure 1). The average maximum deviation angle for the subjects was approximately 7.53 o (as compared to 5.91 o for RWP). Maximum forward lean consistently occurred at the beginning of the push cycle just as the user is strikes the hand rim. During reverse propulsion however, maximum forward lean occurred at the end of the cycle just as the users' hand leaves the handrim. Data showed that kyphosis is decreased when using RWP (Figure 2). The wheelchair user naturally broadens the shoulders as the user pulls on the hand rim (RWP), therefore improving his/her posture.
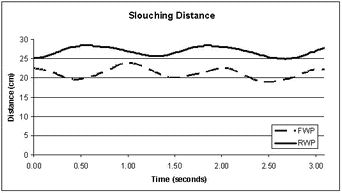 Figure 2 - Typical curves of shoulder to neck distances as a measure of kyphosis (Click image for larger view)
Figure 2 - Typical curves of shoulder to neck distances as a measure of kyphosis (Click image for larger view)
At a user-selected comfortable pace, participants achieved an average increase of 17% in wheel velocity when using RWP (average=0.81m/s, ±0.246m/s) as compared to FWP (average=0.69m/s, ±0.213m/s). The average propulsion cycle time for FWP and RWP was 1.09s ±0.23s and 1.16s ±0.24s respectively. The percentage time spent during active propulsion was longer in RWP (40.8% ±5.7%) than in FWP (32.0% ±9.3%).
DISCUSSIONS
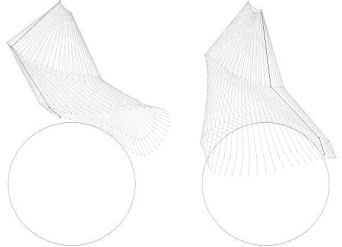 Figure 3. (Left) Forward propulsion (Right) Reverse Propulsion for a single non-wheelchair user (Click image for larger view)
Figure 3. (Left) Forward propulsion (Right) Reverse Propulsion for a single non-wheelchair user (Click image for larger view)
The stick figure (Figure 3) traces the marker on the shoulder, elbow, wrist (ulnar), and 5th metacarpal. The symmetry in arm movement during RWP about the top dead center (TDC) of the wheel may account for lower variability in the degree of torso leaning as well as decreased kyphosis. Further, the angular ranges of motion during the propulsion phase (Figure 4), with respect to TDC, are 63.5% higher in RWP as compared to FWP (66.6 o for FWP and 108.9 o for RWP), which may account for the high power output achieved in RWP. The larger angular range of motion allows the wheelchair user to distribute the applied propulsion force along more of the handrim. The increased velocity in RWP is positively correlated with increases in these angular ranges of motion. However, the angular range of motion in FWP decreases as velocity increases, causing the user to have to strike the handrim at high velocities. In addition, during FWP the user makes use of the effect of gravity on the arms to push the handrim downwards. In RWP the user must lift the arms and pull on the hand rim simultaneously, resulting in a more focused exercise. It is important to combine better posture and active exercise in order to avoid injury.
CONCLUSIONS
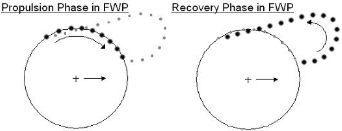 Figure 4. Propulsion and recovery phases during one cycle of wheelchair propulsion (Click image for larger view)
Figure 4. Propulsion and recovery phases during one cycle of wheelchair propulsion (Click image for larger view)
The RWP technique requires leaning of the torso to lesser degree when compared to FWP. Further, kyphosis is decreased when using RWP, which translates into an overall improved seating posture that provides the body with stability and can avoid harmful stresses. Slouching alters the biomechanics of the shoulder joint and can predispose the shoulder joint to impingement or dislocation problems. For wheelchair users, proper posture may be already compromised, but the benefits of a better posture are still unquestionable in the short and long term. In fact, according to a study by Alm et al. "Current wheelchair specifications and adjustments seem to inhibit a postural correction towards upright sitting." This provides an indication of how important it is to improve sitting posture for wheelchair users. Longer propulsion phases and cycle time also meant that stresses on the shoulder would be spread out over longer periods, thus reducing the effect of repeated impact as the hands strikes the hand rim.
REFERENCES
- Rozendaal LA; Veeger HEJ; van der Woude LHV. "The Push Force Pattern in Manual Wheelchair Propulsion as a Balance between Cost and Effect". Journal of Biomechanics 2003; 36:239-247
- Curtis KA, Tyner M, Zachary L. "Effect of a standard exercise protocol on shoulder pain in long-term wheelchair users". Spinal Cord, 2: 143-148, 1999.
- Nasser S; Rincon D, PhD; Ye S. "Rowheel Pulling Wheel System: An Innovative Approach to Wheelchair Propulsion". Proceedings of the Second Latin American and Caribbean Conference for Engineering and Technology, June 2004.
- Rodgers, Mary M, PhD; Gayle, William G, PhD; Figioni, Stephen F, PhD; Kobayashi, Masuo, PhD; Lieh, Junghsen, PhD; Glaser, Roger M, PhD; "Biomechanics of Wheelchair Propulsion During Fatigue", Archives of Physical Medicine and Rehabilitation, v75, 85-93, 1994.
- Alm, M. Gutierrez-Farewik, EM, Hultling C., Saraste H. "Clinical Evaluation of Seating in Persons with complete thoracic spinal cord injury". Spinal Cord, 41:563-571, 2003.
This should be in the right column.