Design and Evaluation of a Laser Joystick in a Fixed Turret Assembly
Erin Rapacki, BS, Katherine Tsui, MS, David Kontak, MS, OTR/L, Holly Yanco, PhD
ABSTRACT
People naturally look at and point to objects. A laser dot can provide the same cue in the world. We have integrated a Class II eye-safe laser pointer into a turret assembly for people who need assistance selecting and handling objects outside their physical range of motion. We evaluated our laser joystick by conducting a within subjects experiment (laser joystick versus a standard presentation pointer) with six participants from Crotched Mountain Rehabilitation Center (CMRC). The results and comments from the experiment have provided guidance for modifications in the next iteration of the laser joystick.
KEYWORDS:
Laser pointer, robot arm, joystick, pointing device, wheelchair
PROBLEM STATEMENT
Abstraction can be a limiting factor for people with cognitive impairments. For example, someone who understands a physical instance of an object, such as an apple, may not understand that a picture of the apple represents the same object. Yet people must use abstractions to make selections to control robot arms and other computer devices. Laser pointers have been investigated by the field of human-computer interaction as an input device for object selection. Our goal is to design a device to allow people with limited upper limb mobility to control a laser pointer to make object selections in their environment.
BACKGROUND
The naturalness of using laser pointers to point to objects has been explored in assistive technology. At the Kanagawa Institute of Technology, a joystick was used to control a servo driven laser pointer mounted to the wall to control a ceiling mounted robot arm (1). Georgia Tech created the “clickable world” concept (2); a laser pointer was used to direct a mobile manipulator to move objects.
There are assumptions about using laser pointers in assistive technology that must be addressed. Kanagawa Institute of Technology used a joystick, which is a well-established access device in assistive technology. However, McLaurin noted that a joystick is “far from ideal for many users” (3). The dexterity and range of motion needed to hold a laser pointer pen for the “clickable world” interface is quite high. Thus, we have embodied the laser into a joystick-like assembly.
DESIGN AND DEVELOPMENT
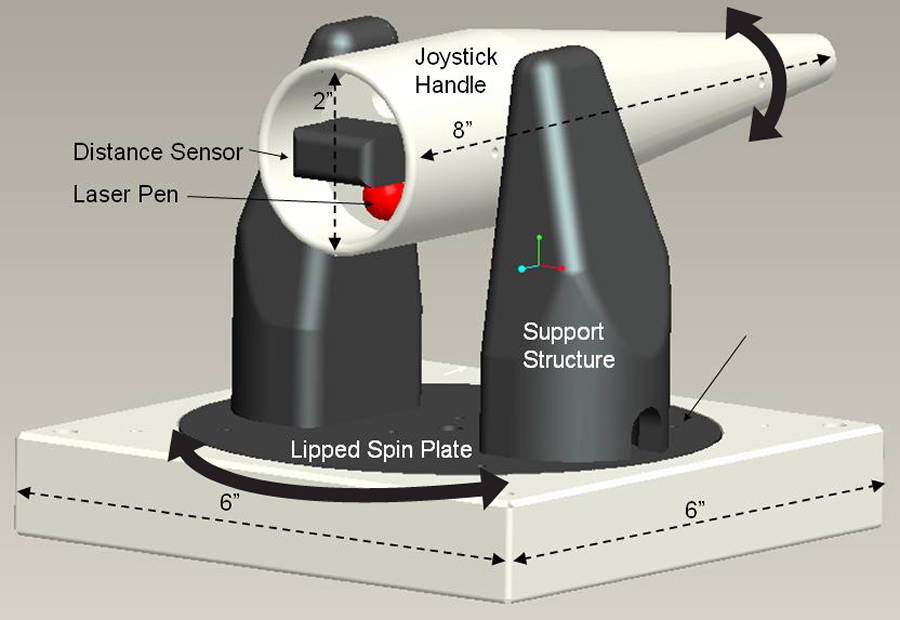 Figure 1: Diagram of laser joystick concept. (Click for larger view)
Figure 1: Diagram of laser joystick concept. (Click for larger view) The final laser joystick will be integrated with a wheelchair mounted robotic arm. For this reason, our laser joystick needed to include two potentiometers, similar to [1], and an infrared distance sensor (see Figure 1). The size of the joystick started with the width of the distance sensor, which constrained the targeting end of the joystick handle to two inches. The shape of the handle is an eight inch long cone for three reasons: to provide ease for gripping, make it look like a wand, and offer more surface area for a person to tap or nudge it from the side. However, having a long tapered handle behind the axis of rotation may be confusing. Such that, to move the laser left, the user must move the handle right. Therefore, the handle needed to look like a wand to provide the affordance of pointing. Lastly, a larger surface area for contact is important for an ADA “closed fist” test.
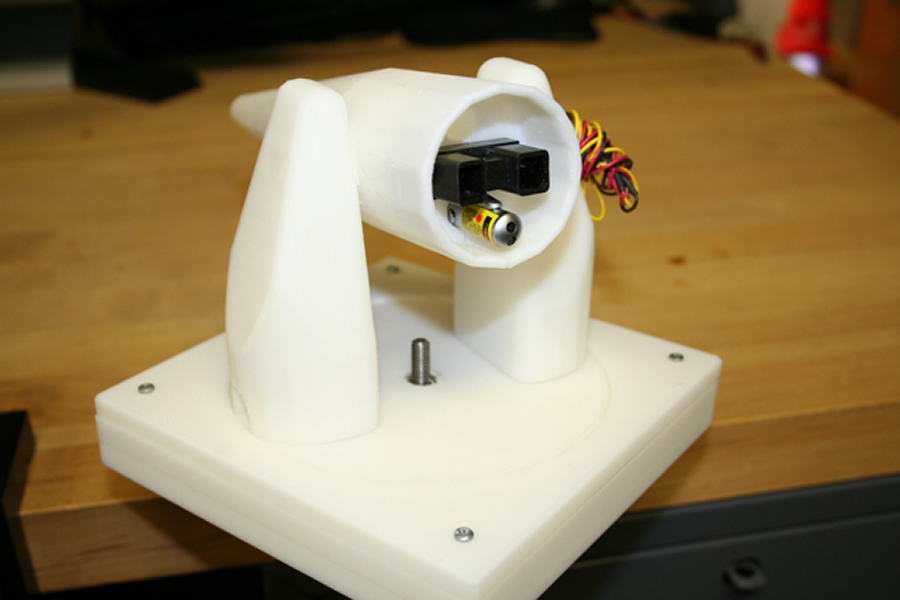 Figure 2: Actual prototype. (Click for larger view)
Figure 2: Actual prototype. (Click for larger view) The dimensions for the other parts in the joystick stemmed from the size of the conical handle. There were no bearings integrated into the assembly. Friction between tightly fitting rotational surfaces allowed the joystick to hold its position when all forces and loads from a user were removed. A first prototype was grown in a Dimension 3D printer using models drawn in ProEngineer (see Figure 2). A Class II eye-safe laser pen was used in this prototype as visual feedback.
EVALUATION
An evaluation of the laser joystick versus a presentation pointer was conducted with six end-users at the CMRC (see Table 1 for details about their abilities and diagnoses). Each participant used both laser devices to point at a total of six objects (see Figure 3). Afterwards, the participant was asked about his/her experience and solicited for improvements to make the laser joystick easier to use.
| Participant | Age | Diagnosis | Physical Ability | Cognitive Ability | Behavior | Vision | Wheelchair | Computer Access |
|---|---|---|---|---|---|---|---|---|
P1 |
35 | Cerebral palsy | Significantly challenged, but moderately functional | No significant impairments | No significant impairments | Corrected with glasses | Power | Standard with left hand only; slow but functional |
P2 |
18 | Cerebral palsy | Significantly challenged, but moderately functional | No significant impairments | No significant impairments | No significant impairments | Power | Standard (limited dexterity) |
P3 |
21 | Cerebral palsy | Significantly challenged, but moderately functional | Mild deficits | No significant impairment | Mild deficits | Power | Standard with left hand only; slow but functional |
P4 |
18 | Muscular dystrophy | Limited strength, dexterity, and range of motion | No significant impairments | No significant impairments | No significant impairments | Power | Standard |
P5 |
17 | Cerebral palsy | Mildly impaired, but functional in most situations | Some mild involvement | No significant impairment | Corrected with glasses | Power | Standard |
P6 |
17 | Spinal Bifida | Good manual dexterity | Mild deficits | Mild deficits | Mild deficits | Manual | Standard (limited dexterity) |
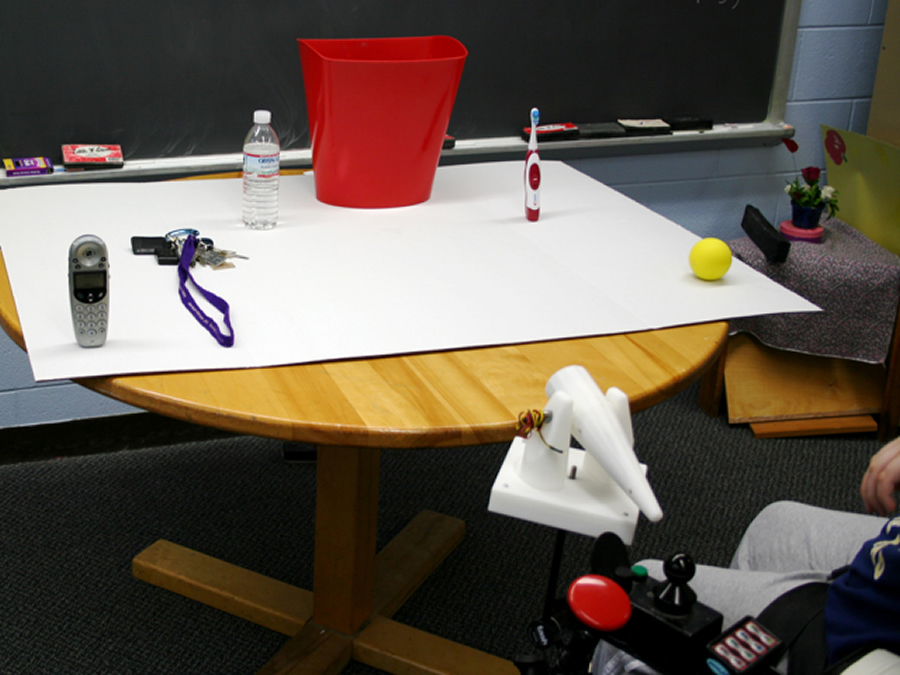 Figure 3: Experimental setup of objects. (Click for larger view)
Figure 3: Experimental setup of objects. (Click for larger view) The start conditions were alternated; three participants used the presentation pointer first, and three used the laser joystick first. A session typically lasted fifteen minutes. First, the laser joystick was mounted to the participant’s wheelchair using a Tash arm. The experimenter, a CMRC assistive technologist, described the session. The participant was instructed to put the laser dot on a given object. Upon confirmation that the participant understood the task, the experimenter said “begin." The participant would then indicate when he or she was satisfied with his/her placement of the laser dot on the object.
RESULTS AND DISCUSSION
Five of the six participants were able to use the laser devices to point at objects. P3 was unable to use both the presentation pointer and the laser joystick, which is discussed further in this section. All six participants stated that they liked using the laser dot to point at objects in the environment. We also investigated the visual aspect of the laser dot on objects. Participants were asked if they were able to see the red laser dot on the trash bin and water bottle. Four of the five participants said that they were able to see the red laser dot on the red trash bin. Four of the five stated that the water bottle was harder to see.


 Figure 4: Hand position of P2 (a), P3 (b), and P4 (c). (Click for larger views)
Figure 4: Hand position of P2 (a), P3 (b), and P4 (c). (Click for larger views) Participants were asked which device they preferred. Two participants (P1 and P2) indicated that the laser joystick was easier to use, and three participants (P4, P5, and P6) indicated that the presentation pointer was easier to use. P1 and P2 both have spasticity in their hands. P2 has flexion in her wrist (see Figure 4 (a)). In their exit interviews, P1 said that his experience with the laser joystick was “much better [than the presentation pointer. The laser joystick was] easier to point. Range of motion [was] better. [I could] concentrate on one motor function instead of two.”
Of the three participants who preferred the presentation pointer, all had good dexterity in their hands. Our occupational therapist noted that P4 (see Figure 4 (b)) was interesting to observe because, in general, he has less range of motion than P3. P3 was unable to operate either laser device due to accessibility issues. She has internal rotation of her shoulder and also flexion in her wrist (see Figure 4 (c)). While P3 was able to grasp the laser joystick, she was not able to move it well horizontally, which was likely caused by a combination of the spasticity in P3's hand and mount location of the laser joystick.
Participants were asked which features of the laser joystick were easy and hard to use. The friction of the laser joystick was constant, which was not suitable for all of our participants. P5 indicated that the easy part of using the joystick was due to the friction. He said, “Once I had the laser dot on the object, it was able to stay still.” However, P5 also said, “It was hard [to use] because there was not a lot of lateral movement.” Two common suggestions for future designs involved increasing the size of the laser dot and decreasing the size of the laser joystick itself.
FUTURE WORK
The next generation laser joystick will include bearings to allow for smooth rotation and adjustable magnetic clutches so each user can have a customized force resistance on each joint. Accessories, such as a vertical post, could be mounted to the handle for people who need other gripping options. An adjustable laser module will be used to increase the dot size to the desired diameter. We also expect the next joystick to be smaller. When the second version of the laser joystick has been built, we will conduct another experiment at CMRC with our end-users.
ACKNOWLEDGMENTS
This work is supported in part by the National Science Foundation (IIS-0534364 and IIS-0546309).
REFERENCES
- Takahashi, Y., M. Yashige, M. Nakamura, and E. Hirata (2002). Human Interface and Vibration Control of Robotic Manipulator Suspended from Ceiling. Transactions of the Institute of Measurement & Control 24 (5), 387–401.
- Nguyen, H., C. Anderson, A. Trevor, A. Jain, Z.Xu, and C.C. Kemp. (2008) El-E: An Assistive Robot that Fetches Objects from Flat Surfaces. Proceedings of the HRI-08 Workshop on “Robotic Helpers: User Interaction, Interfaces and Companions in Assistive and Therapy Robotics.”
- McLaurin, C. A. (1990). Current directions in wheelchair research. Journal of Rehabilitation Research and Development 2, 88–90.
Author Contact Information:
Erin Rapacki, BS; Katherine Tsui, MS; Holly Yanco, PhD. University of Massachusetts Lowell, Department of Computer Science, 1 University Avenue, Lowell, MA 01854. Email: {erapacki, ktsui, holly}@cs.uml.edu
David Kontak, MS, OTR/L. Crotched Mountain Rehabilitation Center, Assistive Technology Unit, 1 Verney Drive, Greenfield, NH, 03047. Email: david.kontak@crotchedmountain.org