The CU Walker: A Walker Trainer for Transitioning to Independent Walking
Gregory Briggs, Joshua Gelser, Drew Hackney, Scott Miller, Joshua Perrel, William Van Dyke, and Richard Young
ABSTRACT
Learning to walk can be a struggle for children with cerebral palsy, especially the transition from relying on a walker to walking independently. Several varieties of gait training devices are currently available to help children with cerebral palsy, but none actively encourage independent walking because they allow patients to use their upper body to support their body weight. As a team, our goal was to design a walker that would encourage independent walking, adjust to fit patients of various heights and skill levels, and be simple enough for easy use in a clinical setting. The main feature of our design is the way the handlebars collapse when trainees apply too much weight to the handles. This mechanism encourages them to use their lower body. This feature, along with many others, makes this walker an excellent transitional walker for children with cerebral palsy or other developmental disabilities.
KEYWORDS
Gait Trainer, Therapeutic, Cerebral Palsy, Independent Walking, Developmental Disabilities.
BACKGROUND
The main objective of our device is to provide feedback to the trainees, within a therapeutic setting, when they place too much of their body weight on the walker. Currently available walkers do not adequately develop lower body strength or proper walking technique, especially for the more functionally capable trainee. The children are able to depend too much on the walker and can support most of their body weight with their hands and arms, reducing the necessity to bear weight with their legs and walk. We classified gait trainers into two types: standing and sitting. Since our main objective was to provide a transitional walker that emphasizes proper walking technique, we designed a standing gait trainer. Furthermore, we looked at the features and accessories available on these walkers and incorporated many of them, such as unidirectional wheels and variable resistance wheels into our design (1).
REQUIREMENTS AND SPECIFICATIONS
Our overall goal is to design a gait training device that will help children with developmental disabilities achieve their greatest potential in walking. To accomplish this, the gait trainer must provide feedback to trainees when they place too much of their body weight on the walker. The feedback should discourage the child from improper technique. Because we designed our gait trainer for use only in therapy sessions, it was necessary for us to make the walker easily adjustable to fit the average child between the ages of five and 13 and easily storable when not in use. Furthermore, we decided that our walker must weigh significantly less than 32 pounds, the average weight of the walkers we researched. Also, because we wanted the walker to be mobile and easy to use in different environments, we decided that it must be narrow enough to allow trainees to walk through a standard 30” door. Finally, we decided that we must manufacture it out of non-corrosive material to assure a longer life.
DESIGN
 Figure 1. (Click for larger view)
Figure 1. (Click for larger view) A computer generated representation of our design is shown in Figure 1. Descriptions of specific design features are outlined below.
Frame
We designed the frame to house all the necessary components while remaining aesthetically pleasing and mechanically sound. The base of the frame is comprised of bent and welded round aluminum tubing. We designed the frame to be very open so that the child would feel unrestricted and unenclosed, while practicing a safe walking pattern. To assure the structural integrity of the frame, we designed support a maximum loading of a 150 lbs applied to the handles.
Wheels and Braking
 Figure 2. (Click for larger view)
Figure 2. (Click for larger view) We designed the wheels with two essential features. The first feature is a unidirectional mechanism housed in the hub of the back wheel, which allows walker to move only in the forward direction. This feature supplies the child with added stability by keeping the walker from rolling backwards into the child. The walker can act as a pull-behind walker by rotating the wheel housing and thus reversing the direction of wheel rotation. The second feature is a linear motion mechanism which allows the walker to turn freely or move in a straight line depending on the desires of the therapist. Three forms of braking are provided: a parking brake to hold the walker in place while not in use, a variable resistance brake that the therapist could apply for children with less walking control, and a corrective brake that stops the walker when the handlebars depress. All of these braking features except for the corrective brake are accomplished by the front wheels (Rifton Equipment, Rifton, NY). The corrective brake is a feature of the handlebars. The corrective brake engages the floor as indicated in Figure 2.
Handles
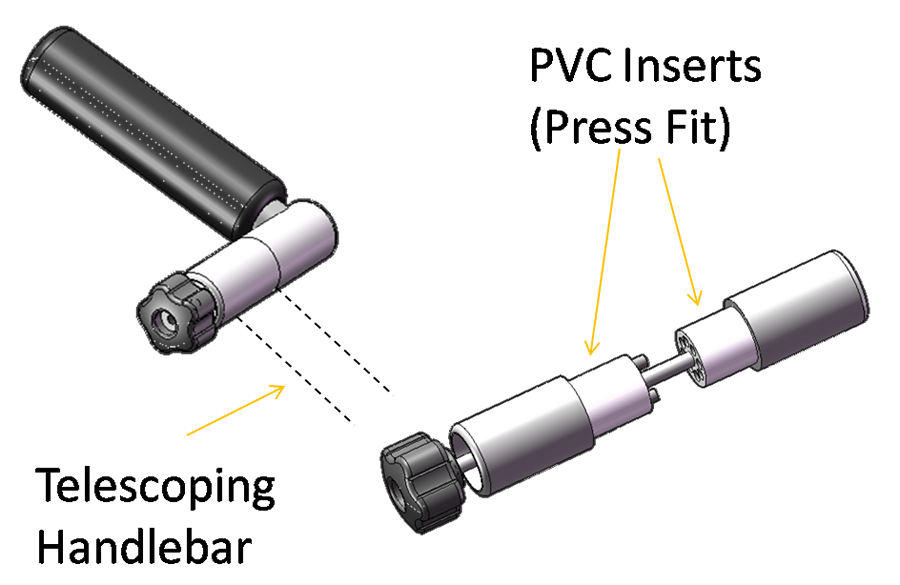 Figure 3. (Click for larger view)
Figure 3. (Click for larger view) Children who have cerebral palsy may have muscle deformities, especially in the hands and wrists. Therefore, we designed our handlebars to be independently adjustable in order to comfortably accommodate the needs of most children. Specifically, we designed the handles to be positioned laterally, on either side of the patient, and in front of the patient. The final design consists of two joints. The first joint is a quick release telescoping joint which allows the handles to be adjusted to any height as well as rotate medial-laterally. The second joint uses two interlocking PVC pieces that can be pulled apart and rotated and reinserted to change handle orientation (Figure 3).
Support Mechanism
The support mechanism is the key part of our design. The support mechanism allows the trainee to experience a falling sensation when they apply too much force to the handlebars, but it controls the descent in a safe manner (Figure 2). We achieved this feature by using two gas springs attached from the handlebars to the base of the frame. The top pivot of the gas springs on the handlebars is fixed while the bottom attachment is adjustable and can move along the frame closer to or farther from the base of the handlebars. By moving the location of the bottom pivot, the therapist can change the angle of the gas spring which in turn changes the force necessary to depress the handlebars. Thus, the walker can be more or less stable depending on the walking skill of the patient.
Motivation
The final design feature of our device was included to make it more enjoyable for children to use. When the children are engaged in the therapeutic activity, they are more likely to benefit from the therapy. Therefore, we have placed two fun feature options on the front of our walker. The first is a toy gun which the child can shoot. The second is a basket that can be used in a hunt and gather game. Both of these toys develop coordination and balance because both involve the child taking a hand off the handles and either shooting the gun or collecting toys to put in the basket.
EVALUATION - CLINICAL TRIAL
 Figure 4. (Click for larger view)
Figure 4. (Click for larger view) After completing our design, manufacturing and in-house testing, we submitted our walker for a two week clinical trial with our rehabilitation collaborator, Children’s Medical Center of Dayton (Dayton, OH). Figure 4 shows Mary, a patient at Dayton Children’s, using the CU Walker. The clinical trial both validated our results and necessitated improvements. Figure 5 is an example of a survey that was filled out during our clinical trials. The therapists who used the device with children said “the walker was an effective therapy tool to reduce the weight on the arms.” One commented that she “liked the fact that the walker allows the children to experience consequences when they make mistakes.” She also said that “it was very motivational. The kids loved to use it.” She also felt the device was aesthetically pleasing. However, some therapists thought our walker was too difficult to set up. Because of the wide range of adjustability we offered, setup took time. After our clinical trial, we simplified our design by allowing only the bottom pivot of the gas spring dampers to move, making the pivot joint on the handles cleaner, and reducing the adjustability on the stopping mechanisms from numerous positions to only two.
DISCUSSION
 Figure 5. (Click for larger view)
Figure 5. (Click for larger view) Overall, our device achieved all the goals we had set out to accomplish. The widest point on our frame is only 27.9 inches, below our 30 inch target. The distance between the rails on which the gas springs sit is wide enough to provide plenty of room for a child with cerebral palsy to walk within. Our device weighs only 19.1 pounds, well below the average walker weight. The weight, along with the relative shortness of the device, allows the walker to be extremely maneuverable and easy for children with cerebral palsy to use. For the therapist, the device is easy to setup and use and folds for easy storage when not in use. Although not a part of our initial objectives, the walker was manufactured for a low cost of $586 dollars, which will be significantly reduced if more units are produced. Finally and most importantly, according to the therapists that participated in our clinical trial, the CU Walker is an effective tool for gait training by encouraging load bearing while creating a fun environment that stimulates effective training.
BIBLIOGRAPHY
- Abledata. (n.d.). Products. Retrieved August 2007, from Gait Trainer: http://www.abledata.com/abledata.cfm?pageid=19327&top=134548&deep=2&trail=22
CONTACT INFORMATION
Greg Briggs c/o Dr. Tim Norman
251 N. Main Street
Cedarville, OH 45314
937-766-3761
tnorman@cedarville.edu