The effect of backrest height on wheelchair propulsion biomechanics among people with low-level paraplegia during uphill condition
Yusheng Yang, PhD1 , Jenwei You, BS1, Shanghua Lin, BS1 , Chinsuan Chen BS1 , Jyhjong Chang, PhD1
Department of Occupational Therapy, Kaohsiung Medical University, Kaohsiung, Taiwan
ABSTRACT
A low backrest may improve wheelchair propulsion performance. To evaluate the effects of a low backrest when encounter a difficult propulsion task, twelve manual wheelchair users with low-level paraplegia conducted propulsion trials under three different slop conditions while using two different backrest heights. The results showed that MWUs with low-level paraplegia were able to swing the arm more backward and push the wheelchair with less propulsion torque to achieve similar power outcome. However, a low backrest may also increase trunk instability during propulsion, especially for those with high-level paraplegia. This trade-off relationship could interfere with the efficiency of wheelchair propulsion with low backrest setting. Future studies are needed to determine if low backrest combined with rigid back support can improve the propulsion performance for MWUs with high-level paraplegia.
KEYWORDS
Wheelchairs; Spinal Cord Injuries; Backrest
BACKGROUND
Most standard manual wheelchairs have fixed backrest heights, which generally are set up as 16 inches high. However, the appropriated height of the backrest should be based on the user’s ability to maintain trunk stabilization and freedom of arm movements for propulsion [1]. For manual wheelchair users (MWUs) who exclusively self-propel in most activities of their daily living, a lower backrest height under the tip of inferior angle of scapula may be preferred. However, few studies had investigated the effects of low backrest on wheelchair propulsion biomechanics. The purpose of this study is to investigate how the low backrest, in comparison with the high backrest, influences wheelchair propulsion biomechanics during uphill conditions. We hypothesized that in order to achieve the requirement of difficult propulsion tasks, a low backrest will help the user to increase propulsion performance in terms of better propulsion efficiency with longer push angle, and more freedom of degree of arm movement during propulsion.
METHOD:
Subjects:
TwelveMWUs (10 men and 2 women) with thoracic or lumbar spinal cord injuries ranging from T10 to L4 were provided informed consent prior to participation in the study. Their mean age and years post injury were 36.1 + 9.4, and 10.1 + 4.9 years respectively.
Experiment protocol:
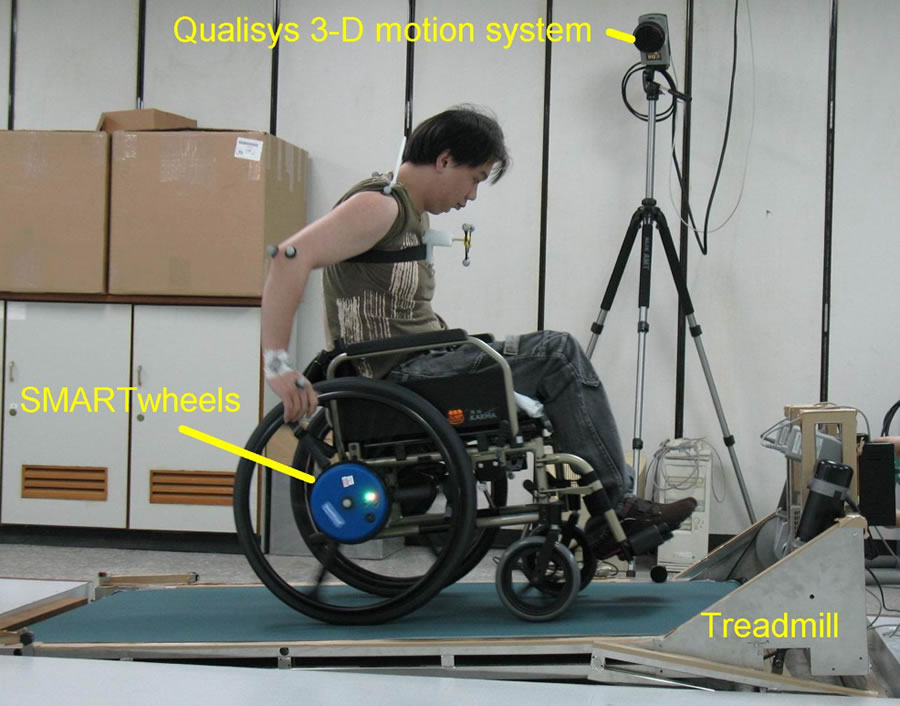
Figure 1. Experimental setting (Click for larger view)
A test wheelchair with adjustable backrest height was fitted bilaterally with SMARTWheels (Three Rivers Holdings, LLC., Mesa, AZ, USA), a three-dimensional force and torque sensing wheel to measure the propulsion kinetics variables[2]. 18 reflective markers were placed on the subject’s upper extremity and upper trunk to record the hand and trunk position in a global reference frame via a three-dimensional camera system (Qualisys Medical AB, Göteborg, Sweden)(Figure1). Subjects were instructed to propel the tested wheelchairs on the treadmill at a steady speed 0.9 m/s for 30 seconds under three different slope conditions (0 degree, 1 degree and 3 degree). All propulsion trials were performed repeatedly twice. For each time, a test wheelchair was set up as one of two different height of backrest: (1) high backrest as 16 inches, and (2) low backrest as 40 % of trunk length. The type of backrest used firstly during trial was randomly assigned.
Data analysis:
For each stroke, the start and end of the push phase was determined by the presence/absence of forces detected by SMARTWheelsTM. The kinetic data were collected at 240 Hz and filtered with an 8th order Butterworth low-pass filter, zero lag and 20 Hz cut-off frequency. Afterwards, data were linearly interpolated for synchronization with the kinematic data with collection rate of 120 Hz. During each trial, propulsion cadence, push angle, torque, mechanical efficiency, propulsion power and arm movement for the ten consecutive push cycles were determined and a mean was computed (Table 1). Mechanical efficiency is the ratio of tangential force (squared) and total resultant force (squared), where tangential force (Ft) is effective force leading to forward propulsion, and resultant force (Ftotal) is the vector summation of the all the forces exerted on the pushrim (equation 1)[3]. From the measured propulsion torque (Mz) and wheel angular velocity (v), the power generation during propulsion could be calculated as shown in equation 2. An analysis of variance (ANOVAs) with repeated measures was used to analyze the main effect of different backrest height. The α value was set at 0.05. All statistical analyses were completed using SPSS software (SPSS, Inc.).
RESULTS:
When subjects propelled with low backrest over three-slope conditions, subjects exhibited large push angle (p=0.04), shoulder flexion angle (p=0.05) with great range of motion of arm forward and backward movement (p=0.006) during push phase. No significant improvement of mechanical efficiency and propulsion cadence was found. However, a significant less demand on propulsion torque was found (p=0.03) when subject pushed uphill with similar propulsion power output (p=0.07).
Frequency |
Push angle (o) |
Mean torque |
Mechanical efficiency |
Mean Power output (W) |
Shoulder flexion (o) |
ROM of arm |
||
|---|---|---|---|---|---|---|---|---|
High Backrest |
0° |
1.2±0.3 |
60.1±18.1 |
5.5±1.5 |
0.52±0.16 |
17.3±3.8 |
41.8±4.7 |
41.5±10.9 |
1° |
1.2±0.2 |
68.0±13.1 |
9.0±1.7 |
0.57±0.16 |
29.4±4.5 |
43.2±4.3 |
47.5±7.5 |
|
3° |
1.4±0.3 |
63.5±14.2 |
15.3±3.2 |
0.60±0.12 |
50.6±9.9 |
42.0±4.7 |
52.2±6.4 |
|
Low Backrest |
0° |
1.2±0.2 |
66.0±10.8 |
5.1±1.5 |
0.48±0.18 |
16.4±4.5 |
45.1±6.3 |
44.9±9.2 |
1° |
1.2±0.2 |
72.2±8.0 |
8.9±1.7 |
0.51±0.10 |
28.7±4.1 |
46.6±6.5 |
51.5±8.3 |
|
3° |
1.4±0.2 |
68.6±11.9 |
14.8±3.2 |
0.62±0.13 |
49.4±10.1 |
47.4±8.1 |
55.6±9.3 |
|
P-value |
0.53 |
0.04 |
0.03 |
0.29 |
0.07 |
0.05 |
0.006 |
|
DISCUSSION:
During wheelchair propulsion, the arm has to swing backward and forward to deliver force on the handrim, thereby generating propulsion power. Any obstacle interfering with this swing movement could shrink this power generation. Since a low backrest provides less constraint for the arm movement during propulsion, MWUs are able to swing the arm more backward and push the wheelchair with less propulsion torque to achieve similar power outcome. The findings from this study had confirmed this viewpoint. However, it is worthy to mention that all subjects from the present study were people with low levels of lesion. The benefits of using low backrest during propulsion may not be observed among people with high levels of lesion. However, a backrest that is too low for the client may provide less trunk support as result in causing trunk instability. Without appropriate trunk stability, MWUs may exhibit paradoxical trunk movements and reduce propulsion efficiency [4].
CONCLUSION:
The appropriate backrest height is largely a trade-off between trunk stability, freedom of arm movement, and propulsion efficiency. A lower backrest could allow more arm movement and increase propulsion performance especially when encounter a difficult propulsion condition. On the other hand, it could result in trunk instability during propulsion. Therefore, backrest height should be adjusted as the level of MWUs’ trunk stability improves. It is suggested that low backrest combined with rigid back support may be a good solution to improve propulsion performance MWUs.
References
- Trombly, C. A., & Radomski, M. V. (2002). Occupational therapy for physical dysfunction (5th ed.). Philadelphia: Lippincott Williams & Wilkins.
- Asato KT, Cooper RA, Robertson RN, Ster JF (1993). SMARTwheels: development and testing of a system for measuring manual wheelchair propulsion dynamics. IEEE Trans Biomed Eng, 40,1320-1324.
- Boninger, M. L., Cooper, R. A., Robertson, R. N., & Shimada, S. D. (1997). Three-dimensional pushrim forces during two speeds of wheelchair propulsion. Am J Phys Med Rehabil, 76, 420-426.
- Rice, I., Koontz, A. M., Boninger, M. L., & Cooper, R. A. (2004). An analysis of trunk excursion in manual wheelchair users. Proceedings 27th international RESNA Conference, Orlando, Florida.
ACKNOWLEDGMENTS
This study was funded by the National Science Council, Taiwan (NSC 962320B037020 ) & Kaohsiung Medical University, Taiwan(Q097043) .
Author Contact Information:
Yu-Sheng Yang, PhD, Department of Occupational Therapy, Kaohsiung Medical University
100, Shi-chuan 1st Rd., Kaohsiung, Taiwan, R.O.C., Office Phone 886-7-312-1101 ext. 2655 EMAIL: yusheng@kmu.edu.tw