1 University of South Florida, Tampa, FL 33569, 2 University of Pittsburgh, Pittsburgh, PA 15206
ABSTRACT
Simulators have been proven to be highly effective tools for the purpose of training individuals to accomplish a certain tasks, often times when those tasks are cost-prohibitive, dangerous, or otherwise, impractical. Currently, there exists no safe method for training individuals with disabilities to drive. This new idea for an integrated simulator will allow users to develop fine motor skills needed for vehicle operation when using Drive-by-Wire (DBW) controls, before driving on the roadways. The study seeks to develop and determine the effectiveness of a novel virtual driving simulator utilizing DBW controls for acceleration, braking, and steering to aid in the training of those requiring assistive vehicle modifications for their independence. This paper addresses the effectiveness of the acceleration/braking controls.
KEYWORDS
AEVIT; driving simulator; SSI; reaction time; elderly
BACKGROUND
Virtual simulators, being useful tools for training and evaluation, are advantageous in that they provide a safe environment for the development of special skills in a controlled environment. [1]. For years, a number of agencies, including the United States military and NASA, have used simulators, including those affixed with Drive-by-Wire (DBW) controls, effectively and efficiently to train subjects in a variety of ways [2] A DBW system utilizes electrical circuits to actuate servo motors from a given input signal to achieve a desired output. In DBW systems the output is not directly mechanically connected to a control surface (gas/brake pedals, steering column, etc.); usually the input controller is linked by wires to a localized servo motor where direct control can be given.
Currently, there are no driving simulators with DBW controls in use for training individuals with disabilities or for the elderly population. Previous studies have excluded individuals with disabilities who use assistive driving devices [1]. After having their vehicle modified, the person with a disability is given some instruction and then on-road training which can be dangerous when the user is relatively inexperienced with their new DBW controls. This new idea for an integrated DBW simulator will give persons with disabilities the necessary extensive training before actually using the roadways.
The simulator at the University of South Florida consists of two major components: the SSI (Simulator Systems International) simulator and the AEVIT (Advanced Electronic Vehicle Interface Technology) DBW control system. The SSI simulator displays the virtual driving environment. Secondly, the AEVIT system is equipped with two separate input controllers, including a 4-way joystick and a small steering wheel/gas-brake lever. The signals from the controllers are processed in an input drive module and the signal is then read by a servo motor controller. The steering servo is linked via a gear set to the original integrated steering column on the SSI simulator unit. The gas/brake pedals are connected to the servo motor through a series of cables.
Persons with a limited range of motion in their hands and feet will benefit the most from the simulator. It will allow users to practice safe vehicle control and becoming proficient drivers before undergoing evaluation with their newly modified vehicles and rejoining other drivers on the road [4]. In part, this is advantageous as the cost of training with vehicle modification companies is very high. Moreover, the risk associated with driving in the virtual environment is essentially removed. Since drivers with disabilities have limited access to training safely in their vehicles before using public roadways and parking lots, this is a necessary and important tool.
RESEARCH QUESTION
![Figure 1 shows how the AEVIT system is designed. The controllers connect to a pair of input drive modules which, in turn, drive the servo motors, giving input signals to the SSI simulator. Portions of the figure were taken from [3].](FowlerM/systemoverview.jpg) Figure 1: AEVIT/SSI Design Overview [3]
Figure 1: AEVIT/SSI Design Overview [3] The objective of this preliminary study is to determine the differences in performance among different user groups using DBW controls in a simulator and to see how well this compares to the performance of those using standard vehicle controls in a simulator. The user groups are defined as 5 able-bodied individuals ages18-64, 5 elderly individuals 65+, and 5 individuals with disabilities ages 18-64 who utilize an assistive driving controller (mechanical) and have mobility in both arms to control simulator DBW controls.
METHODS
 Figure 2: Starting Position
Figure 2: Starting PositionThe participants of the three user groups gave their informed consent and then they were asked to complete a simple acceleration and braking test. They were instructed to start the vehicle using the key in the ignition on the steering column of the simulator. After shifting from park into drive, using a standard steering column shifting lever, subjects were asked to accelerate to 50 miles per hour and then to brake as quickly as possible when a stop sign appeared on the center of the screen. At the beginning of the simulation, the subjects’ vehicle started on the rightmost of three lanes on a straight stretch of paved road. Both sides of the road had a grassy shoulder approximately half the width of a vehicle. The shoulder is lined by a short concrete wall.
 Figure 3: End of Test
Figure 3: End of TestFor each of the systems, three trials were conducted after the user had one practice try. Able-bodied and elderly individuals were asked to perform the task using all three controller setups (gas/brake-zero effort steering wheel, joystick, and standard controls). The individuals with disabilities completed the test using only the DBW controllers. Maximum vehicle speed, reaction time, reaction distance, stopping distance, and braking distance were observed and calculated by the simulator. In some cases, individuals with disabilities were unable to start the vehicle and shift it into gear due to lack of finger dexterity or reaching distance. In those instances, assistance was provided since it had no effect on the results of the test. Ordinarily, modified vehicles are equipped with remote secondary controls for vehicle ignition and gear shifting. The simulator is not equipped with the aforementioned secondary controls.
RESULTS
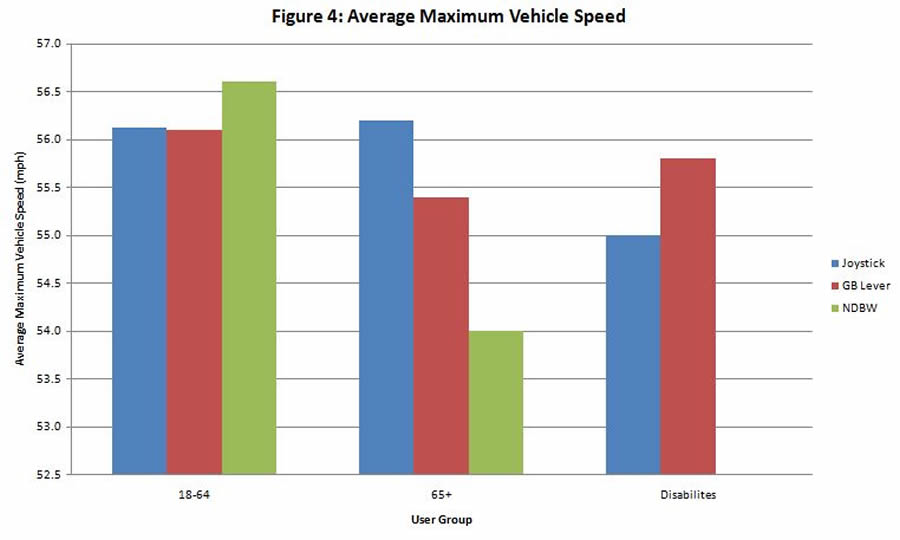 Graph 1: Average Maximum Vehicle Speed
Graph 1: Average Maximum Vehicle SpeedThe reaction times, maximum vehicle speed, and braking distances were averaged for each of the three user groups and the results are shown in Figures 2-4. It is important to note that in four trials, three users (2 - 65+, 1- individuals with disabilities) did not adequately complete the acceleration/braking test while using the joystick. These subjects were either unable to accelerate to 50 mph and crashed before being issued the stop command or crashed into the wall before coming to a complete stop. Only the successful trials were considered in the results.
DISCUSSION
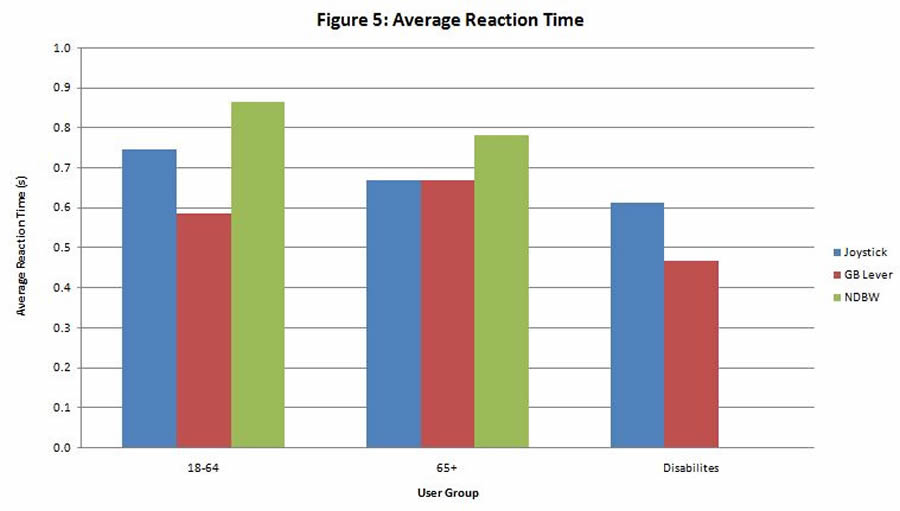 Graph 2: Average Reaction Time
Graph 2: Average Reaction TimeIn general, participants had a faster reaction time using DBW controls. Furthermore, the gas/brake lever was the faster of the two. When a user is stopping, in the simulator or in an actual vehicle, using the gas and brake pedals, the foot must move a relatively large distance. In comparison, the DBW gas/brake controller requires only a few inches of travel to engage the brake from a full throttle position.
 Graph 3: Average Braking Distance
Graph 3: Average Braking DistanceFor both of the DBW controls, individuals with disabilities had slightly faster reaction times than able-bodied persons, possibly due to their experience with assistive hand controls. On the other hand, the shortest braking distance was marked by the use of the standard gas and brake pedals for both of the able-bodied groups. Braking distance was somewhat longer (4feet for 18-64 group, 11 feet for 65+) for the DBW systems. The servo is capable of fully applying the brake. Therefore, the extended braking distances can only be attributed to the fact that the rate at which the brake is applied by the DBW servo is slower than a person’s foot.
Ideally, a user will exhibit a DBW reaction time similar to the standard pedals. For able-bodied persons, the reaction time was faster when using the DBW controls.
CONCLUSIONS
The results of this preliminary study show that DBW controls can be successfully used to accelerate and decelerate a vehicle in a simulated environment. By the end of the three trials, all participants were able to start the vehicle, reach 50 mph and stop without hitting and obstacles. The joystick, being a coupled controller, is more difficult for new users to master. When accelerating, most users inadvertently steered the vehicle away from a straight path. For this reason, it will be necessary to train drivers with disabilities using this DBW system for an extended duration in the simulated environment. A future study will seek to evaluate the performance of DBW controls for steering tasks and real-world driving scenarios that include traffic. Those studies will help the University of South Florida to develop a driver training course for persons with disabilities who use DBW modified vehicles.
REFERENCES
- Schultheis, Maria T., Lisa K. Simone, Emily Roseman, Richard Nead, Jose Rebimbas, and Ronald Mourant. "Stopping behavior in a VR driving simulator: A new clinical measure for the assessment of driving." Proceedings of the 28th IEEE EMBS Annual International Conference. New York City, New York, USA. 4921-924. Print.
- Berhane, Rufael. "An Electromechanical Synchronization of Driving Simulator and Adaptive Driving Aide for Training Persons with Disabilities." Thesis. University of South Florida, 2008. Print
- AEVIT Owner's Manual. Baton Rouge: Electronic Mobility Controls. Print.
- "Modifed Vehicle Training." Personal interview. 13 Jan. 2010
ACKNOWLEDGEMENTS
This project is funded through a cooperative agreement with Carnegie Mellon University (and the University of Pittsburgh) from the National Science Foundation to perform work related to “Quality of Life Technology Engineering Research Center” at Carnegie Mellon University. Matthew Wills played an integral part in the simulator design and maintenance. We are also grateful for Dr. Ying (USF), PhD, and his insight during system evaluation.