*Biomedical Engineering Department- University of California, Irvine, Irvine, CA 92697
**Department of Neurology, School of Medicine- University of California, Irvine, Irvine, CA 92697
ABSTRACT
To assess the feasibility of using an EEG-based brain computer interface (BCI) to control a lower extremity functional electrical stimulation (FES) device to restore ambulation in individuals with paraplegia due to spinal cord injury (SCI), a BCI controlled walking simulator was developed and tested. Study participants underwent electroencephalogram (EEG) recordings while they imagined standing idle and walking. The EEG signal changes between these two states were used to develop and train an online, real-time BCI system to control the ambulation of an avatar within a virtual environment (VE). All participants were able to immediately control the ambulation of the avatar. The successful implementation of this system suggests that integrating an EEG-based BCI with a lower extremity FES device is feasible.
KEYWORDS
Brain Computer Interface; Functional Electrical Stimulation; Spinal Cord Injury; Gait
BACKGROUND
Spinal cord injury (SCI) patients are often unable ambulate and perform basic motor functions that are essential for independence and activities of daily living. For individuals with low cervical, or thoracic level SCI, lower extremity motor function can be lost making ambulation impossible (1). Currently, there are no biomedical solutions to restore lost neurological function of the lower extremities in such SCI patients. As a result, biomechanical solutions have been sought. One such alternative is a functional electrical stimulation (FES) device, which can restore motor function by stimulating paralyzed muscles via an external stimulator. For individuals with paraplegia from SCI, current FES systems provide an alternate method for standing support and assistance in ambulation (2). The only FDA-approved lower extremity FES device is the Parastep device (Sigmedics, Fairborn, Ohio), though its adoption has been fairly limited (3). Furthermore, the control of such FES devices is typically unintuitive, relying on a manual control box. Improving upon the intuitiveness of FES device control may lead to more widespread adoption, which may be achieved by integration with brain computer interface (BCI) technology.
BCI is a technology that uses the predictable brain electrophysiological changes associated with cognitive processes, such as those seen in electroencephalogram (EEG) during motor imagery (MI) (4), in order to control external devices. BCI control of external assistive devices can help those with severe paralysis from SCI regain motor behavior, and the ability to control and manipulate their environment by “thought,” thereby bypassing a damaged spinal cord. In the past 30 years, extensive work has been done to develop and refine BCI control of assistive devices to help restore basic motor functions in patients with severe motor paralysis. Applications have included the BCI control of a computer mouse, virtual keyboard, virtual reality avatar, and the limited control of an upper extremity FES device (2), (5), (6). Likewise, BCIs may potentially allow individuals affected by paraplegia due to SCI to attain “thought control” of lower extremity prostheses, such as FES devices, thereby effectively bypassing a disrupted spinal cord to restore lower extremity motor function.
There are several obstacles in developing this integrated BCI-FES technology. First, the brain electrophysiological signals associated with human ambulation need to be identified and characterized. Once characterized, these signal features must be used to develop a prediction model, which in turn analyzes novel brain electrophysiological signals in real time and determines whether an individual intends to walk or stand idle. This prediction model can then be implemented to direct the ambulation of an avatar in a virtual reality environment or to control an FES device. Here, we describe the design and successful implementation of an EEG-based BCI to control the ambulation of a virtual reality avatar.
RESEARCH QUESTION
Hypothesis:
There are predictable EEG signal changes that occur during the walking motor imagery that can be exploited for the operation of an online, real-time BCI system to control human gait.
By testing this hypothesis, we can assess the feasibility of integrating an EEG-based BCI with a lower extremity FES device to restore intuitive ambulation to individuals with paraplegia due to SCI.
METHODOLOGY
Subjects and Training Data Acquisition: Three healthy subjects participated in this study (2 male, 1 female, ages 22-39). EEG signals were acquired using a subset of 32 channels of a 10-10 International Standard EEG cap (see Figure 1). A bioamplifier system (Nexus 32BBS, Mind Media, The Netherlands) was used to acquire signals in a common average reference mode. The signals were amplified, band-pass filtered (0.01-50 Hz) and sampled at 512 Hz. Training data was collected by commercial software (Biotrace, Mind Media, The Netherlands) while subjects performed MI as they watched a video of a 3-D avatar alternating between 5 minutes of standing and walking.
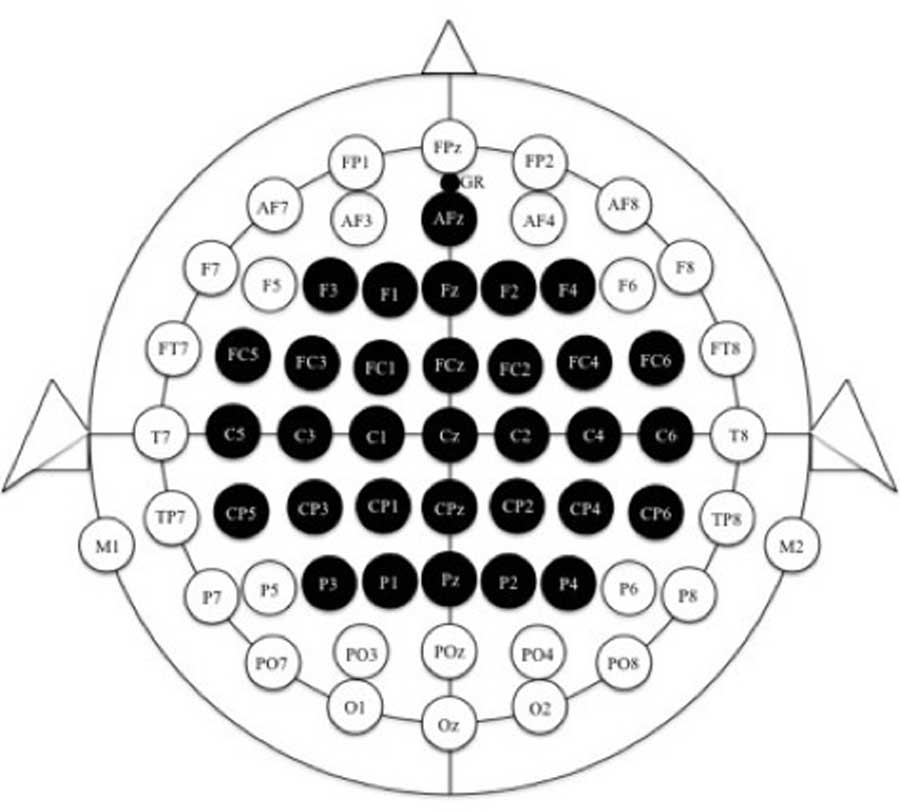 Photo 1: EEG Placement System
Photo 1: EEG Placement SystemSignal Processing and Classification: The EEG signals were labeled as either idle or walking. The labeled signals were then analyzed using automated exploratory methods (7), (8) to determine the significant neurophysiological signal features that differentiate walking and idle states. EEG signals were first divided into 4-second segments, resulting in 75 trials for both idle and walking states. For each channel, spectral energies from 6 to 26 Hz were calculated in 2-Hz bins using fast Fourier transform. This resulted in 320-D data for each trial (10 frequency bins x 32 channels). Classwise principal component analysis (7) in conjunction with linear discriminant analysis or approximate information discriminant analysis (8) was then used to reduce the input dimension to 1-D feature space. The linear Bayesian classifier was used to classify the mental state as either idle or walking.
 Photo 2: Virtual Reality Avatar
Photo 2: Virtual Reality AvatarEvaluation of BCI Control: Subjects were seated in front of a computer screen, while EEG data were acquired and classified in real-time. A custom-built Matlab (Mathworks, Natick, MA) script was developed for this purpose. A 3-D avatar in an open field virtual environment (VE), using Garry’s Mod for Half Life 2 (Source Engine, Valve Corporation, Bellevue, Washington), was displayed from a third person, “over-the-shoulder” perspective (see Figure 2). Subjects were instructed to use walking MI to move his/her avatar to greet a series of 10 “non-player characters” (NPCs) positioned along a linear path in front of the subject’s avatar, similar to Leeb et al (9). Subjects must stop within a proximity of the NPC and stand still long enough to receive a verbal greeting. After this greeting, subjects were to initiate walking towards the next NPC until all 10 were greeted.
RESULTS
Analysis of the 150 trials of training data revealed that subjects had ~80.0% average predictability of idle and walking MI states based on EEG data. Considering a chance level of 50%, this demonstrates a significant predictability between the two states (p value 2.9869e-014).
After 10 minutes of training data collection, all subjects obtained meaningful control immediately upon their first attempt at completing the assigned task. Subject 1 had 8.50±0.71 NPC (mean ± standard deviation) greetings per trial, and required an average time of 162 sec to complete the task. Subject 2 averaged 8.00±1.00 NPC greetings per trial, and required an average time of 229 sec. Subject 3 averaged 7.00±2.16 NPC greetings per trial, and required an average time of 103 sec.
For the purposes of comparison, a simulated random walk was generated. Using randomly generated states, 100 trials of random walk allowed the avatar to get an average of 2.7±1.30 NPCs and an average time of 76 sec. When compared to simulated random walk, all subjects demonstrated purposeful control (p < 0.0001). These performances are displayed in the table below (Table 1).
DISCUSSION
We demonstrated a successful implementation of a real-time, asynchronous BCI, to control ambulation within a VE. The offline EEG signal analysis of idle and walking MI demonstrated that the two states had highly predictable electrophysiological signal differences. Using these differences to build the state prediction model for online BCI operation, all subjects participating in this study obtained immediate and purposeful BCI control. Since this linear ambulation in a VE is the closest scenario to actual use of a potential BCI-controlled FES device, we conclude that such a concept may be feasible.
Subject |
Score (Number of stops at NPCs out of a total score of 10) |
Average Time to Completion |
|---|---|---|
1 |
8.50±0.71 |
162 sec |
2 |
8.00±1.00 |
229 sec |
3 |
7.00±2.16 |
103 sec |
Random Walk |
2.70±1.30 |
76 sec |
It should also be noted that the subject performances seen here are from a single experimental session for BCI-naïve individuals. Whereas other BCI techniques may require subjects to train over a extended time periods (from days to months (10), the technique employed here allows users to gain immediate control. This BCI technique, which employed an automated signal analysis techniques described in (7), (8), allowed for a BCI setup in which there is no manual selection of EEG channels or signal features. Subjects can utilize a “natural” MI, i.e. imagination of walking to “walk” in the VE. Since training is brief and automated, and the cognitive process to operate the BCI is intuitive, minimal outside interference is required to set up the automated system. This may have implications in future practical clinical BCI applications. Further subject training is expected to help improve the performance.
To have full control over a lower extremity FES device, other degrees of freedom of control, such as turning left and right will need to be implemented and tested in future studies. In addition, since the target populations for lower extremity FES devices are individuals who are paraplegic from SCI, further studies are also needed to determine how well this technique extends to these individuals.
REFERENCES
- Dietz V, Nakazawa K, Wirz M, Erni T. Level of Spinal Cord Lesion Determines Locomotor Activity in Spinal Man. Experiments in Brain Research. 128(3): 405-409 (1999).
- Pfurtscheller G, Müller GR, Pfurtscheller J, Gerner HJ, Rupp R. ‘Thought’-Control of Functional Electrical Stimulation to Restore Hand Grasp in a Patient with Tetraplegia. Neuroscience Letters. 351(1): 33-36 (2003).
- Brissot R, Gallien P, Le Bot MP, Beaubras A, Laisné D, Beillot J, Dassonville J. Clinical Experience with Functional Electrical Stimulation-Assisted Gait with Parastep in Spinal Cord-Injured Patients. Spine. 25(4): 501-508 (2000).
- Anderson KD. Consideration of user priorities when developing neural prosthetics. J Neural Eng. 6(5): 55003 (2009).
- Dornhege G, Millán J, Hinterberger T, McFarland D, Müller KR. Towards Brain-Computer Interfacing (1st ed.). Cambridge, MA: MIT Press (2007).
- Wolpaw JR, Birbaumer N, McFarland DJ, Pfurtscheller G, Vaughan TM. Brain-Computer Interfaces for Communication and Control. Clinical Neurophysiology. 113(6): 767-791 (2002).
- Das K, Rizzuto DS, Nenadic Z. Mental State Estimation for Brain-Computer Interface. IEEE T. Bio-med. Eng. 56(8): 2114-2122 (2009).
- Das K., Nenadic Z. Approximate information discriminant analysis: A computationally simple heteroscedastic feature extraction technique, Pattern Recogn. 41 (5): 1548-1557 (2008).
- Leeb R, Friedman D, Müller-Putz GR, Scherer R, Slater M, Pfurtscheller G. Self-Paced (Asynchronous) BCI Control of a Wheelchair in Virtual Environments: A Case Study with a Tetraplegic. Comput Intell Neurosci: 79642 (2007).
- Birbaumer N, Murguialday AR, Cohen L. Brain-computer interface in paralysis. Curr Opin Neurol. Dec;21(6):634-8 (2008).
ACKNOWLEDGMENTS
This research is funded by the Roman Reed Spinal Cord Injury Research Fund of California. (RR 08-258, and RR 10-281).
Author Contact Information:
Po T Wang, University of California, Irvine, Irvine, CA 92697, Phone: 949-892-3652, Email: ptwang@uci.edu
Word Version PDF Version