Ithaca College
Ithaca, NY 14850
ABSTRACT
Independent mobility is crucial in the development of typical infants. Children with physical disabilities may experience concomitant emotional and psychological limitations attributable to restriction of movement. Robots with sonar have been suggested as a viable means of providing mobility for infants with physical disabilities. We have developed such a system using a Pioneer 3 robot and various input devices. In our system the infant is positioned in a commercial child seat on top of the robot and allowed to control the robot’s movement with various control methods. This paper describes one control method for our system that uses a Wii balance board to detect when the infant leans and then moves the robot in the direction of the lean. We use parameter files to customize the system for each child.
KEYWORDS
Infant, Mobility, Robot, Balance Board, Posture Tracking
BACKGROUND
The first independent mobility of the human being is achieved with the
development of crawling and walking, which occurs in typically developing
infants between six and 14 months of age. Independent mobility
is crucial in the development of typical infants, as it allows them to
acquire a broad range of skills in the cognitive, perceptual, emotional,
and social domains [(1), (2), (3)]. Typically developing children
whose mobility has been restricted for even relatively short periods
of time have been found to demonstrate apathetic behavior and depressed
motivation (4). Children with physical disabilities and restricted
mobility have been found to demonstrate increased dependence, frustration,
depressed motivation, lack of curiosity, and a lack of confidence (4).
Several investigators have reported that children with physical disabilities
may achieve significant developmental benefits from the use of powered
mobility, including increased interaction with the environment and contact
with others, self-initiated independent movement, positive affect, and
communication [(5), (6)]. Powered mobility is costly, imposes safety
risks, and traditionally has not been recommended until children are
24 to 36 months of age [(7), (8)]. Younger children may also benefit
from the developmental opportunities provided through the use of powered
mobility. However, very limited research has been conducted to
investigate these potential benefits. Galloway, Rhu, and Agrawal
(8) have suggested that the use of a robot may be a viable means of providing
mobility for infants and young children with physical disabilities.
PROJECT GOALS
The long-term goal of this research is to investigate the developmental benefits of providing safe powered mobility to infants with physical disabilities who are less than two years of age. Our immediate goal is to develop a custom system allowing pre-mobile infants to display goal-directed movement. We will be running a pilot study in early 2010 to determine an optimal control method for our robotics system that will allow typically developing infants to demonstrate purposeful mobility within a structured environment. We hope to work with approximately 15 typical infants between the ages of 4 and 12 months of age. The infants will provide information about which systems can be controlled by the infant at an early age; that information will allow us to calibrate the software systems to allow babies of different weights, lengths, and motor abilities to efficiently control the robot. Following testing with typically developing infants, we expect to determine the best option for control of the robot, develop an infant training program to use the device, and then to assess developmental benefits that may be associated with the use of the robot.
ROBOT SYSTEM
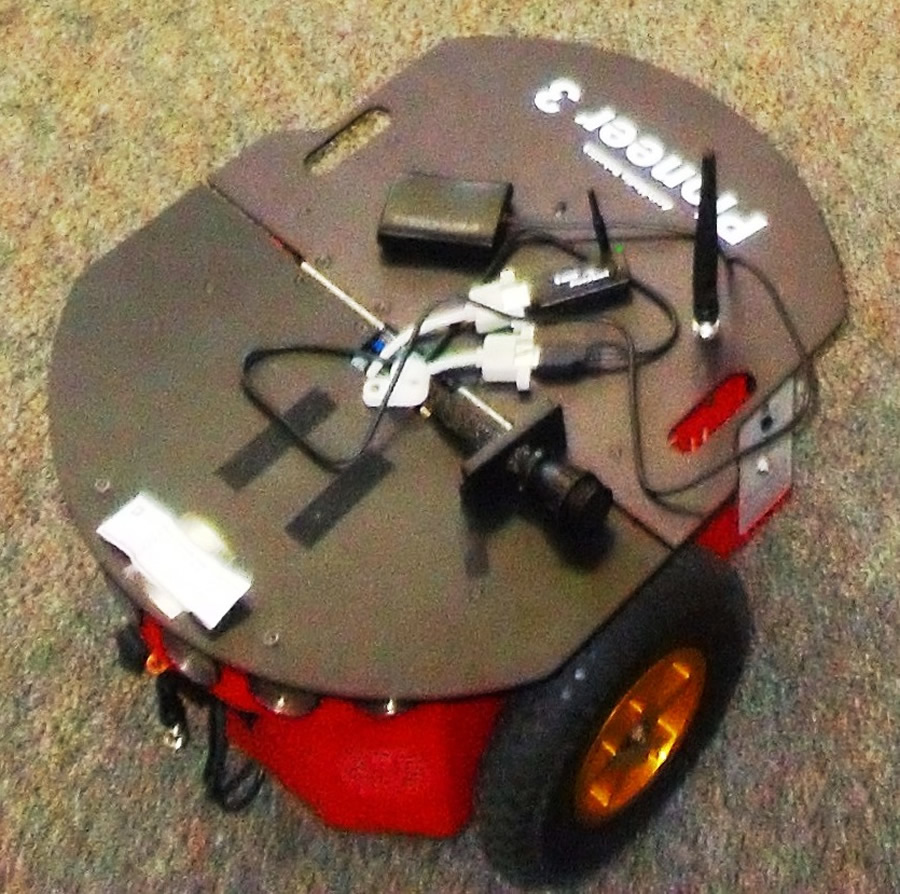 Photo 1: Robot
Photo 1: RobotThe robot system we are using consists of a Pioneer 3 robot, a custom
seating platform, a commercial child’s seat, commercial input devices,
and custom robotics software. The Pioneer 3 robot is commercially
available and is equipped with sonar which we use to detect obstacles
and prevent collisions. Photo 1 shows the robot and its sonar sensors.
We designed and built the custom platform to fit over the robot and support
the weight of the child, seat and input devices. A commercial wireless
joystick acts as a master override switch and allows the therapist to
remotely control the robot and to stop movement at any time for safety
reasons. The other commercial input devices we are using include
a gaming joystick, a child’s joystick and a Wii Fit Balance Board. We
have developed the robotics software to run on the robot’s on-board computer,
allowing an infant to control movement using one of these input devices. Our
software monitors the sonar to prevent collisions while gathering robot
motion data from the robot wheel encoders.
BALANCE BOARD CONTROL
 Photo 2: Balance Board Control Method
Photo 2: Balance Board Control MethodThe most novel of our control methods makes use of the balance board. This
device is designed for use with the Nintendo’s
Wii gaming system for fitness games and exercises. For our robot
system, the child sits in the commercial seat on top of the balance board,
which lies on the custom platform.
The balance board has responsive pressure sensors in each of its four
corners and built in Bluetooth capabilities. We use a commercial
Bluetooth adapter and WiiYourself! C++ library (9) to access balance
board data within our robotics software. Our software compares
the values of the four pressure sensors to determine which, if any, direction
the infant is leaning. When a sustained lean is detected the robot
begins to move in that direction. When the child reaches out for
an item, he or she leans in the direction of the item and moves toward
it. We believe this will be the most intuitive method for a young
child to learn to use.
CUSTOMIZATION
Each child moves in different ways. To account for this our robotics software has a number of parameters to adjust operation. The balance board method uses four threshold values to determine the percentage of a child’s weight that must be on one side to constitute a lean. Other parameter values include the speed at which the robot should move and the stopping distance to avoid collisions. We create a file to store these values for each child. The first time a child uses the system ,the therapist can input parameter values, use default values, or use calibrated values. During the calibration the child is prompted to lean in each of the four directions. Readings are taken during these leans to compute the threshold values. The parameter values can be easily adjusted at any time to improve system performance by editing this file.
OBSERVATIONS
While we have not yet performed any formal studies, we have had three infants, aged 7 to 9 months, use the system as we developed the software. All of the infants were able to move the robot as they leaned to get an offered toy or drink. Children were also observed to move the robot spontaneously when they were not being directly offered something or coaxed. The robot was responsive to the infants' upper body weight shift as they leaned, moving to the left, forward, and the right according to the direction of the child's movement. Although it is not possible at this time to determine whether the children realized that their leaning caused the robot to move, we anticipate that this will become apparent as children are offered repeated experiences with the robot.
REFERENCES
- Bertenthal, B.L., Campos, J.J., & Barrett, K. (1984). Self-produced locomotion: An organizer of emotional, cognitive, and social developments in infancy. In Robert N. Emde and Robert J. Harmon (Eds.), Continuites & incontinuities in development, pp. 175-210. . New York and London: Plenun Press
- Bertenthal, B.L., & Campos, J.J. (1987). New directions in the study of early experience. Child Development, 58, 560-567.
- Thelen, E. (2000). Grounded in the world: developmental origins of the embodied mind. Infancy, 1, 3-28.
- Butler, C. (1986). Effects of powered mobility on self-initiated behaviors of very young children with locomotor disability. Developmental Medicine & Child Neurology, 28, 325-332.
- Deitz, J., Swinth, Y., & White, O. (2002). Powered mobility and preschoolers with complex developmental delays. The American Journal of Occupational Therapy, 56, 86-96.
- Nicholson, J., & Bonsall, M. (2002). Powered mobility for children under five years of age in England. British Journal of Occupational Therapy, 68, 291-293.
- Cox, D. L. (2003). Wheelchair needs for children and young people: a review. British Journal of Occupational Therapy, 66(5), 219-223.
- Galloway, J. C., Ryu, J., & Agrawal, S.K. (2008). Babies driving robots: Independent mobility in very young infants. Journal of Intelligent Service Robotics, 1, 123-134.
- gl.tter (2007). Wii Yourself! Native C++ Wiimote Library. http://wiiyourself.gl.tter.org
ACKNOWLEDGMENTS
Keith Taylor (Washington State ’10) and Virginia Nearing (Saint Mary’s
’10) also worked on developing this robotics software as part of a summer
2009 Research Experiences for Undergraduates project at Ithaca College
funded by the National Science Foundation.
Lauren Cresser (Ithaca College ’11) is assisting with this project, funded
by an Ithaca College DANA internship.
Author Contact Information:
Madeline E. Smith, Ithaca College, Williams Hall, 953 Danby Rd, Ithaca,
NY 14850, PHONE: (610) 730-2837 EMAIL: msmith11@ithaca.edu