Quantitative Assessment of Walker-Assisted Gait in Transtibial Amputees
Maximilian Kopf1, Omid Jahanian1, Alyssa J. Schnorenberg1, Barbara Silver-Thorn2, Joel Kempfer3, Roger O. Smith1 and Brooke A. Slavens1
1Department of Occupational Science & Technology, University of Wisconsin-Milwaukee, Milwaukee, WI
2Department of Biomedical Engineering, Marquette University, Milwaukee, WI
3Kempfer Prosthetics Orthotics, Inc., Milwaukee, WI
INTRODUCTION

Based on the Health and Retirement Study, there has been a nearly 50% increase in the use of mobility devices since 2004 (Gell, Wallace, LaCroix, Mroz, & Patel, 2015). The National Health Interview Survey found a 57% increase in the use of walkers (LaPlante, Hendershot, & Moss, 1992). Walkers are commonly used to improve stability and ambulatory ability in amputees, and to avoid falls during daily activities (Edelstein, 2013). Our research goal is to develop quantitative methods for assessment of walker-assisted gait in amputees that characterize full body kinematic features.
Amputees are categorized based on their ability or potential to ambulate, into one of five activity levels (or K-levels) ranging from K0, no mobility, to K4, high mobility. For this study, we are demonstrating methods for detecting differences in walker-assisted gait between K2 and K3 levels. A K2 amputee is a typical community ambulator, who is able to traverse low-level environmental barriers such as curbs, stairs or uneven surfaces. A K3 amputee has a greater ambulation potential, with the ability to traverse most enviromental barriers, and may have exercise capability that demands prosthetic use beyond simple locomotion. Amputee classification levels assist in determining which prosthetic components may be functionally appropriate, and which will be approved by insurance companies.
The use of a walker directly impacts an individual’s functional mobility. Therefore, a method for evaluating walker-assisted gait in amputees that is sensitive enough to detect variations due to prosthetic components of various K-levels is vital.
Quantitative studies of the functional requirements for effective walker use in lower-limb amputees are limited and rare. The purpose of this study was to investigate how lower extremity and upper extremity joint ranges of motion change with different K-level components. Our aim was to demonstrate that the methods employed will allow for quantitative assessment of a amputee walker user. Ultimately, this work will assist prosthetists and clinicians with objective decision making.
METHODS
Subject
Data Collection
All procedures were reviewed and approved by the University of Wisconsin-Milwaukee Institutional Review Board. An A-B single-subject study design was used to investigate the subject’s walker-assisted gait with two different prosthetic foot components. At the first testing session, the subject’s current prosthesis, the Catalyst foot, a K3 level prosthesis, was evaluated during multiple trials of walker-assisted gait at a self-selected speed. Parameters of interest were temporal-spatial metrics and full-body joint kinematics during walker-assisted gait. At the end of the first testing session the Catalyst foot was changed to a Seattle Light Foot, a K2 level prosthetic component. Between the testing sessions the subject had six days to acclimate to the changes. After the second testing session the prosthetic was returned to the original settings. A certified prosthetist applied all alterations to the prosthesis.
Retro-reflective markers were placed on the subjects’ skin over bony anatomical landmarks of the upper and lower limbs, according to the Vicon Plug-in-Gait model, to track human movement (Figure 1). Four additional markers were placed on the subject’s walker.
Data Processing
Motions of the upper extemity (UE) and lower extremity (LE) joints were captured using a 15-camera Vicon T-Series Motion Analysis System at 120 Hz. The subject walked along a 10 m path at a self-selected speed on level, tile floor during the first and second testing sessions. The data was labeled and analyzed using Vicon’s full body Plug-in-Gait Model within the Vicon Nexus sofware. Temporal-gait parameters and full-body kinematics were calculated and averaged over multiple walking trials. For each trial, gait cycle parameters, joint motions, and joint ranges of motion of the shoulder, elbow, wrist, pelvis, hip, knee and ankle were determined. Data was time-normalized and reported for every 1% of the gait cycle. Data was post-processed using MATLAB and Microsoft EXCEL software.
RESULTS
Temporal-Spatial Parameters
The mean cadence was higher while using the K3 foot component. In comparison the subject took 10 steps less per minute while walking with the K2 foot. It is also interesting to note that there was almost no difference in the mean walking speed, with an average of 0.59 m/s with the K3 foot and 0.57 m/s with the K2 foot.
| Parameter of Prosthetic Side | Catalyst, K3 Foot | Seattle Light, K2 Foot |
|---|---|---|
| Mean Cadence (steps/min) | 91.6 (± 4.1) | 81.7 (± 4.8) |
| Mean Walking Speed (m/s) | 0.58 (± 0.05) | 0.56 (± 0.05) |
| Mean Stride Time (s) | 1.31 (± 0.05) | 1.47 (± 0.08) |
| Mean Step Time (s) | 0.61 (± 0.02) | 0.74 (± 0.05) |
| Mean Sound Foot Off (% of gait cycle) | 24.4 (± 2.1) | 23.4 (± 0.9) |
| Mean Sound Foot Contact (% of gait cycle) | 53.3 (± 1.4) | 49.2 (± 2.3) |
| Mean Foot Off (% of gait cycle) | 69.6 (± 2.5) | 72.9 (± 0.9) |
| Mean Single Support (% of gait cycle) | 29.0 (± 1.9) | 25.8 (± 1.9) |
| Mean Double Support (% of gait cycle) | 40.6 (± 3.6) | 47.1 (± 2.2) |
| Mean Stride Length (m) | 0.76 (± 0.05) | 0.83 (± 0.03) |
| Mean Step Length (m) | 0.40 (± 0.03) | 0.49 (± 0.02) |
Joint Kinematics
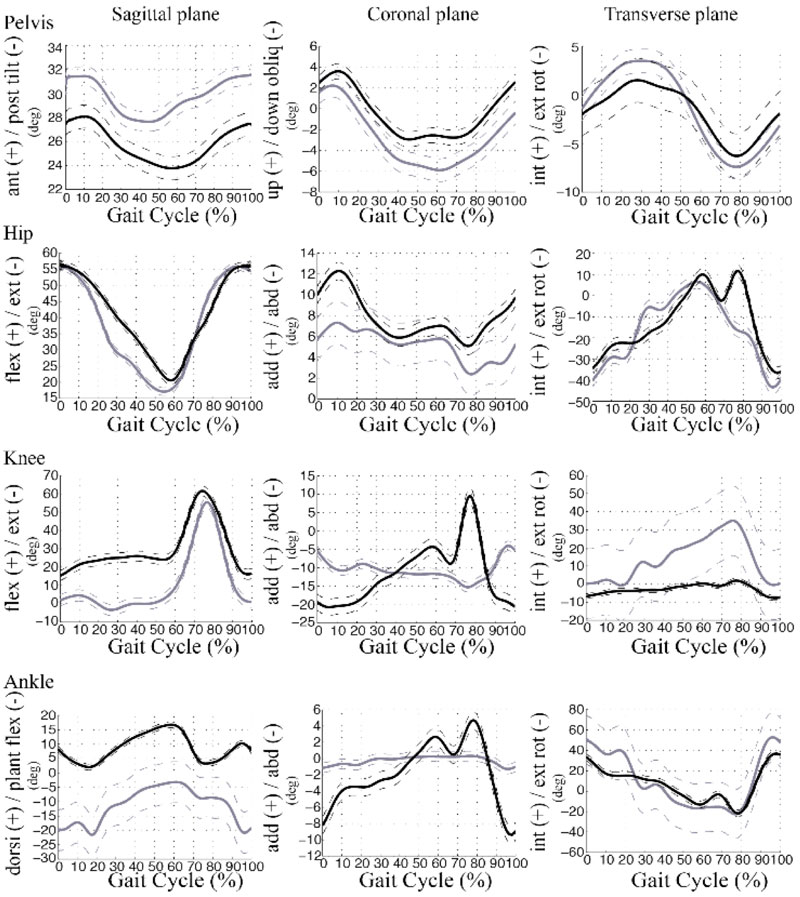
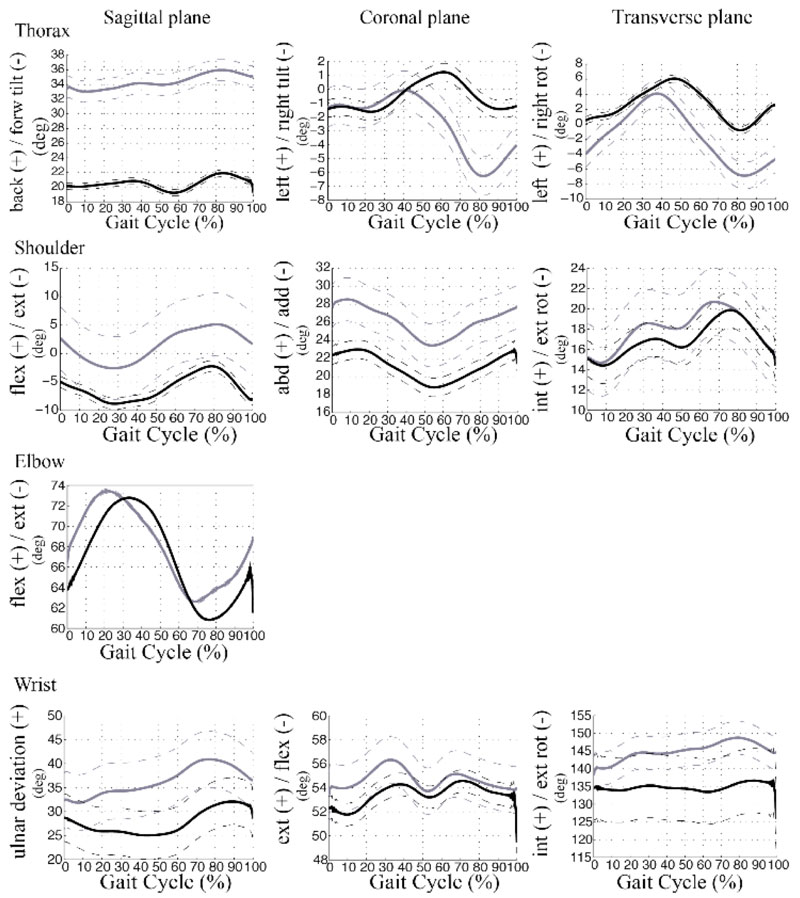
Mean joint angles of the right upper extremity joints (thorax, shoulder, elbow and wrist joints) as well as mean joint angles of the prosthetic-side lower extremity joints (pelvis, hip, knee and ankle) were characterized over the gait cycle (Figure 2 & Figure 3).
The knee and ankle joints demonstrated the greatest differences in the motion pattern between the Catalyst (K3) and the Seattle Light (K2) prosthetic feet (Figure 2 and Table 2). The K2 foot was approximately fixed in the coronal plane, with a range of motion of only 1.7 deg, while the K3 foot allowed for an average ROM of 14.6 deg in the coronal plane. There were also distinct differences in the knee joint angle motion over the gait cycle between the K3 and K2 feet in the coronal and transverse planes. The K2 foot resulted in a smaller coronal plane knee joint ROM (13.8 deg) than the K3 foot (32.1 deg), while the K3 foot resulted in a smaller transverse plane knee joint ROM (10.2 deg) than the K2 foot (38.0 deg). Additionally, while similar mean pelvis ROM is seen with both the K2 and K3 feet, there is a clear shift to increased anterior tilt with the use of K2 foot. Other angular shifts may be seen in the coronal plane of the pelvis and the sagittal plane of the ankle.
| LE ROM | Plane | K3 | K2 |
|---|---|---|---|
| Pelvis | Sagittal | 4.8 (± 0.9) | 4.3 (± 0.5) |
| Coronal | 7.3 (± 1.5) | 8.2 (± 0.5) | |
| Transverse | 8.1 (± 3.2) | 11.2 (± 1.4) | |
| Hip | Sagittal | 36.2 (± 1.7) | 39.3 (± 1.1) |
| Coronal | 7.5 (± 1.3) | 5.1 (± 1.5) | |
| Transverse | 51.2 (± 1.6) | 50.3 (± 2.4) | |
| Knee | Sagittal | 47.1 (± 2.4) | 59.6 (± 3.4) |
| Coronal | 32.1 (± 3.7) | 13.8 (± 3.3) | |
| Transverse | 10.2 (± 1.6) | 38.0 (± 18.6) | |
| Ankle | Sagittal | 14.8 (± 1.3) | 21.5 (± 9.8) |
| Coronal | 14.6 (± 0.6) | 1.7 (±0.6) | |
| Transverse | 60.4 (± 1.6) | 78.2 (± 19.1) |
There were no notable differences in the mean ROM of the upper extremity joints between the use of the K3 foot and the K2 foot (Table 3). However, there were multiple joints that experienced shifts in the angular pattern (Figure 3). The thorax angle shifted to a greater backwards tilt when the K2 was used. The shoulder joint experienced a shift towards greater abduction, and less extension during use of the K2 prosthetic foot. The wrist experienced less ulnar deviation during K3 prosthetic foot use. Lastly, a temporal shift was observed at the elbow joint in the sagittal plane, with peak elbow flexion being reached at a later time in the gait cycle when the K3 foot was used.
| UE ROM | Plane | K3 | K2 |
|---|---|---|---|
| Thorax | Sagittal | 2.7 (± 0.9) | 3.3 (± 0.8) |
| Coronal | 3.2 (± 0.5) | 6.3 (± 1.9) | |
| Transverse | 6.9 (± 0.4) | 11.0 (± 1.7) | |
| Shoulder | Sagittal | 6.6 (± 0.9) | 8.0 (± 2.7) |
| Coronal | 5.0 (± 0.0) | 5.2 (± 0.8) | |
| Transverse | 6.0 (± 1.5) | 7.4 (± 0.3) | |
| Elbow | Sagittal | 12.0 (± 1.4) | 11.0 (± 0.2) |
| Wrist | Sagittal | 7.9 (± 2.4) | 9.5 (± 0.3) |
| Coronal | 3.3 (± 1.2) | 4.0 (1.6) | |
| Transverse | 4.6 (± 0.6) | 8.7 (± 0.3) |
DISCUSSION
There is limited knowledge about walker-assisted gait in transtibial amputees. To the knowledge of the authors this is the first study investigating the gait cycle parameters and full-body joint kinematics of transtibial amputees using walkers.
Investigations of persons with unilateral transtibial amputations typically report walking speeds of about 1.1 – 1.4 m/s (Schmalz, Blumentritt, & Jarasch, 2002), similar to what was seen in this study. Additionally, we found that the double support time increased about 8% when the Seattle Light (K2) prosthetic foot was worn, which may suggest that the participant had more challenges with balance when using the K2 component. This may further imply that she may rely more on her walker to increase her balance and reduce her risk of falling when using the Seattle Light foot.
A plethora of differences were noted in the lower extremity joint kinematics, clearly demonstrating the ability of the model, and the testing methods, in detecting changes in amputee walker-assisted gait due to the use of two different K-level foot components.
Additionally, our findings show that the subject has a more neutral and upright body posture when using the K3 Catalyst foot (see Thorax data in Figure 3). In addition, ulnar deviation, internal rotation and extension of the wrist joint were less when the subject wore the Catalyst (K3) prosthetic foot during walker-assisted gait. Such positions lessen the risk of pain and pathology development, such as carpal tunnel. Thus these methods are also able to provide insight on the impact of the prosthetic components on the interaction of the upper extremity with the walker.
Limited information can currently be obtained on the effects of different prosthetic components (van der Linde et al., 2004). It is generally believed that socket fit, alignment and prosthetic components lead to different walking patterns. The usage of assisted mobility devices should also be considered. We have successfully demonstrated methods for quantifying full-body kinematics in walker-assisted amputees. The quantitative methods presented in this study provide a means for objective evaluation of assistive device use. This work was demonstrated in a single subject to show sensitivity and the ability to detect changes between K2 and K3 components.
REFERENCES
Edelstein, J. E. (2013). Assistive devices for ambulation. Phys Med Rehabil Clin N Am, 24(2), 291-303.
Gell, N. M., Wallace, R. B., LaCroix, A. Z., Mroz, T. M., & Patel, K. V. (2015). Mobility device use in older adults and incidence of falls and worry about falling: findings from the 2011-2012 national health and aging trends study. J Am Geriatr Soc, 63(5), 853-859.
LaPlante, M. P., Hendershot, G. E., & Moss, A. J. (1992). Assistive technology devices and home accessibility features: prevalence, payment, need, and trends. Adv Data(217), 1-11.
Schmalz, T., Blumentritt, S., & Jarasch, R. (2002). Energy expenditure and biomechanical characteristics of lower limb amputee gait: the influence of prosthetic alignment and different prosthetic components. Gait Posture, 16(3), 255-263.
Su, P.-F., Gard, S. A., Lipschutz, R. D., & Kuiken, T. A. (2007). Gait characteristics of persons with bilateral transtibial amputations. J Rehabil Res Dev, 44(4), 491-501.
van der Linde, H., Hofstad, C. J., Geurts, A. C. H., Postema, K., Geertzen, J. H. B., & van Limbeek, J. (2004). A systematic literature review of the effect of different prosthetic components on human functioning with a lower-limb prosthesis. J Rehabil Res Dev, 41(4), 555-570.