Shaswati Saha![]() 1
1![]() , Lauren Selingo
, Lauren Selingo![]() 3
3![]() , Emily Olejniczak
, Emily Olejniczak![]() 3
3![]() , Hanna Noyce
, Hanna Noyce![]() 3
3![]() , Vaskar Raychoudhury
, Vaskar Raychoudhury![]() 2
2![]() , Roger O. Smith
, Roger O. Smith![]() 3
3![]() , and Md Osman Gani
, and Md Osman Gani![]() 1
1![]()
![]() 1
1![]() Information Systems, University of Maryland, Baltimore County,
Information Systems, University of Maryland, Baltimore County, ![]() 2
2![]() Computer Science and Software Engineering, Miami University,
Computer Science and Software Engineering, Miami University, ![]() 3
3![]() Rehabilitation Sciences & Technology, University of Wisconsin, Milwaukee
Rehabilitation Sciences & Technology, University of Wisconsin, Milwaukee
INTRODUCTION
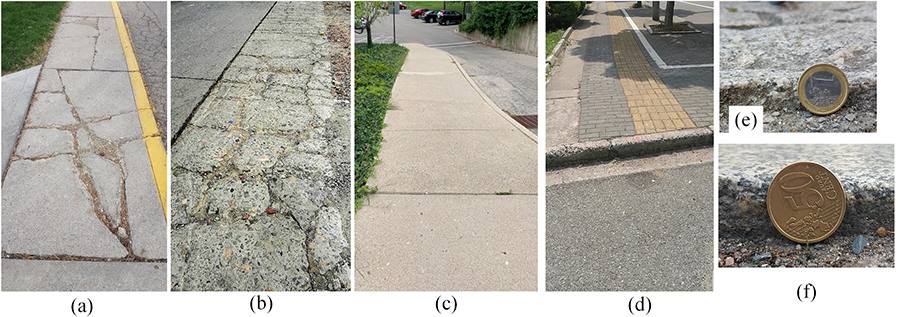
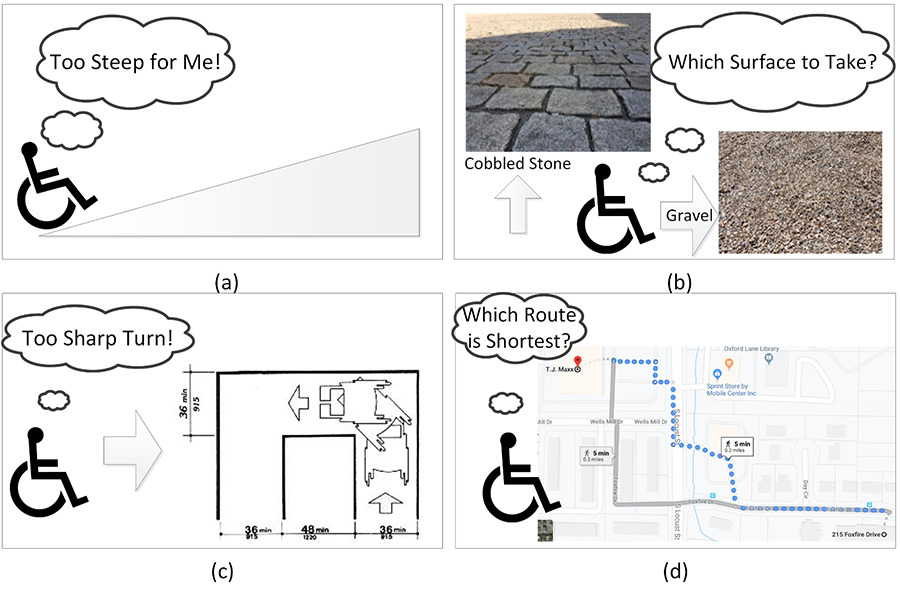
Wheelchair users face a number of challenges while traveling through the built environment for their daily mobility requirements. Barriers are more challenging in new environments because of unknown obstacles [3, 15]. Uneven surfaces such as roads and sidewalks, presence of stairs and steep slopes, absence of curb- cuts and pedestrian crosswalks, and varied weather conditions thwart successful outings for someone using a wheelchair. Fig. 1 presents a set of barriers captured by our team from different parts of the world. Features such as a steep incline of a route, rough surface type of the path, edge characteristics of a path (sharp turn, high curb, etc.), length of the route, and poor weather conditions (rain, snow, ice and wind) can combine to form a unique challenge. Fig. 2 illustrates four basic examples related to four different levels of accessible routing problem for wheelchair users. An inhospitable route can quickly become an insurmountable physical or psychological barrier resulting in a failed outing or deter future outings. From a literal sense, an unknown physical barrier may cause late arrival at the destination, exhaustion, or major frustration. Additionally, the navigational and cognitive barriers of identifying a suitable route may be too overwhelming or time consuming for a person that dissipates their desire to go on independent outings.
Consequently, identifying the best route to a destination is not just preferable, but essential for an individual's successful community participation. This is particularly true for new wheelchair users, older people who may have poor health, and people with various injuries who are more likely to require assistance while using wheelchairs in the community.
In this paper, we present a personalized accessible routing solution called MyPath for people with ambulatory disabilities given the fact that they are the largest community of the people with disabilities, approximately 35%, in the USA [1]. We especially focus our solution to the public space users with disabilities or impairments that satisfy the following four criteria - (1) they must have ambulatory disorders and can only move around using an independent manual or a power wheelchair through the sidewalks, external pathways and routes, (2) they must be interested in being out in the community on a regular basis and take part in various activities,
- they must be open to using assistive technology to facilitate mobility, and (4) they must have access to smart portable handheld devices, such as smartphones and tablets.
This paper describes the following three major contributions being made by the MyPath system:
- Develop MyPath Prototype for Data Collection Classification of Outdoor Path Accessibility
- Develop a Personalized Accessible Routing and Navigation Function for the MyPath App using the Path Accessibility Data
RELATED WORKS
In order to study the background of the problem, we reviewed a large number of research papers in the area of accessible routing and navigation. We have classified them into three basic categories: (A) User Survey and Spatial Analysis [9, 14, 16, 8]: surveys of mobility-impaired individuals and spatial analysis of public places to identify the mobility aspects of users and accessibility barriers present in the built environment; (B) Data Collection [12, 13]: Techniques (manual and automated) for collecting (single-user and crowdsourced) information on accessibility barriers and assigning accessibility scores to different features; (C) Mobility Assistants [4, 11, 5, 6]: Systems (web-based and smartphone-based) developed for mobility assistance (routing and navigation) to mobility-impaired persons.
Most existing systems described above were developed for specific purposes, different from our universal data collection, routing and navigation system. Generally, existing systems are limited in the following ways: 1) Data collection logistics: paper and pencil, too lengthy, time consuming. 2) Not easily portable in the field: need other materials and tools to complete. 3) Limited measurement sensitivity: dichotomous compliance data only. 4) Too global results: only a few general scores, no specific data. 5) Computer platform specific: data input or reports. 6) Costly to use: proprietary for data input or obtaining reports. 7) Limited or targeted scope: fail to include important aspects of built environment. 8) Does not recognize individual accessibility needs: generalizes needs into one or a few types of disabilities. 9) Limited functionality: e.g., uses ADA criteria only and fails to address preferred functional access of the environment. 10) No formal analysis of surface-induced vibration on accessibility: classifying surfaces based on vibration generated by wheelchair movement has not been investigated.
Above discussion shows that the existing solutions fail to leverage emerging technologies, such as sensor systems to objectively classify surfaces. Furthermore, most of them were developed just as prototype proof- of-concept applications and hardly supported turn-by-turn dynamic navigation for wheelchair users.
SYSTEM ARCHITECTURE & FUNCTIONALITIES
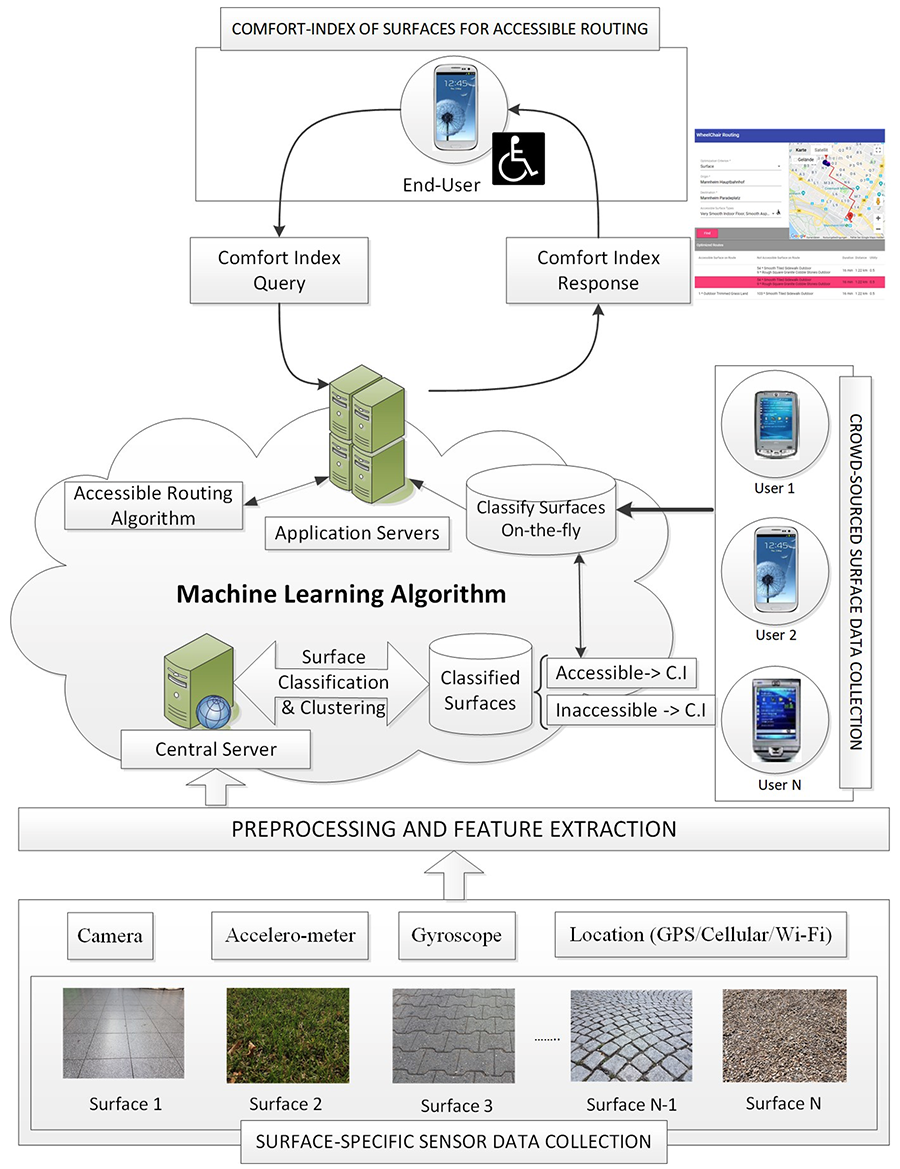
In order to address the challenges encountered by the existing accessible routing and navigation systems, we propose the novel MyPath system which is structured into a three-layer hierarchy as shown in Fig. 3. In the lower layer, the accelerometer, gyroscope and location sensors of a smartphone (or an integrated sensing module) are used to collect the vibration data generated by the propagation of a wheelchair (bearing a user) through a path. The user may voluntarily contribute 1-2 photographs of the surface of the path or any particular barrier encountered. The collected vibration data are then sent to the upper layer, which comprises of cloud storage and a machine learning (ML) model to classify the surfaces based on their vibration patterns into accessible and inaccessible. Crowdsourced surface information is then updated in an open-source mapping platform named OpenStreetMap (OSM) [10] on a regular basis. An open-source routing library called GraphHopper [7], compatible with both Android and iOS based mobile platforms, is used to generate accessible routes through the built environment on a point-to-point basis. Routes returned consider the personal preferences of the wheelchair users depending on their physical capabilities and types of wheelchairs. MyPath App facilitates surface data collection, routing, and navigational functionalities. When a user completes a trip, they can provide feedback regarding the experience and suggest improvement
Environmental data collection methodology
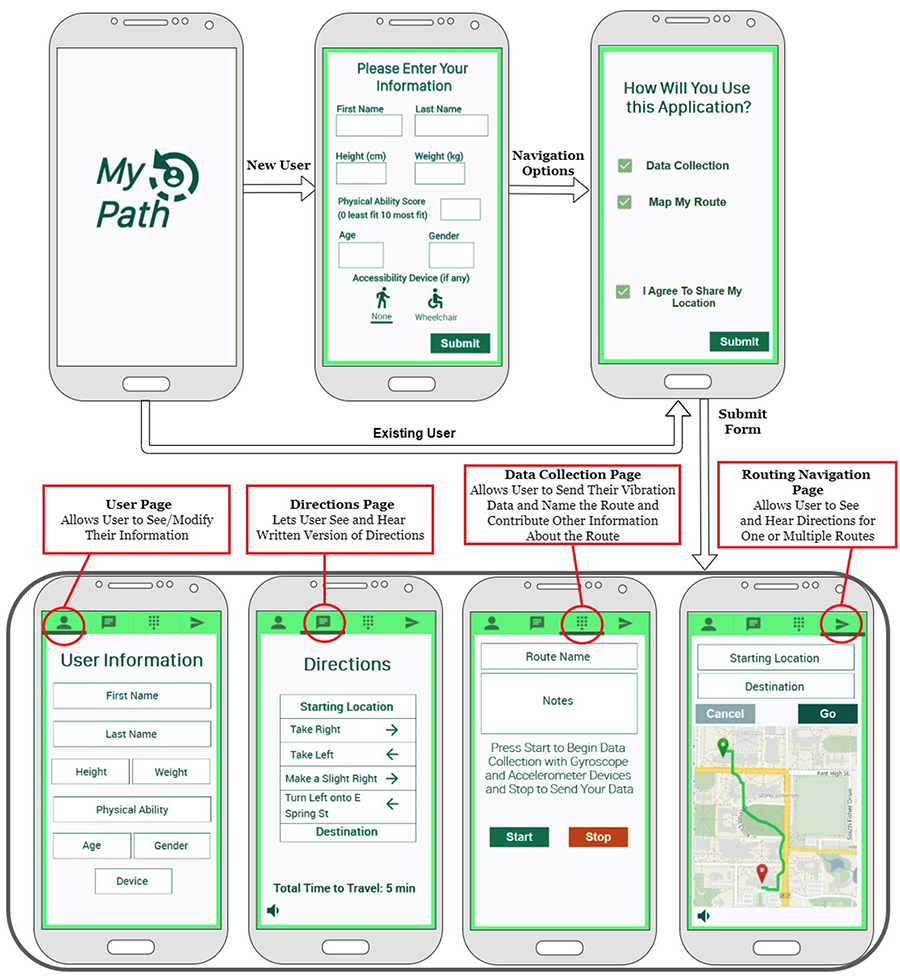
The foundation of the MyPath system is the user and path-data collection procedure. The accessibility of surface, curb, ramp, passage, etc. must be reviewed, documented, and uploaded into an OSM database through crowdsourcing to develop an accessibility map. The MyPath App can be installed on any smart- phone (Android and iOS) that has accelerometer, gyroscope sensors and GPS (Global Positioning System) embedded. We also use a Clippable Sensing Module (CSM) which is a small motion sensor system that includes accelerometer and gyroscope sensors that can be attached to wheelchairs to capture vibrations. The MyPath App is designed to be portable, efficient in its use, and secure. We are working with various organizations (such as student disability services, county boards of developmental disabilities, wheelchair distributors, rehab centers and hospitals) to recruit wheelchair users for our study. Once a user starts the data collection procedure, the app records the surface vibration and the associated GPS coordinates. The vibration data is then sent to our ML model, which then identifies the surface type. By cross-referencing it with the surface found at that location on OSM as well as the timestamp when the surfaces were collected, it is possible to provide updates to OSM by verified contributors.
Surface classification using machine learning
Designing an accurate classifier for surface accessibility is one of the major focus of this work. An adapt- able, accessible routing algorithm considers various factors in the input space. These include the source and target destinations, information about the user, including weight, physical ability and age, wheelchair characteristics, slope measurements and surface types. These criteria are crucial in order to understand how accessible a route may be. Base knowledge is required to train a classifier, which is why only surface type and slope provide the base knowledge for the path that does not vary from individual to individual. The slope classifier is needed for classifying paths that do not fall into ADA Standards [2]. We use ML algorithms to train various models based on the vibration data captured by the accelerometer and gyroscope sensors. The model is trained on objective understanding of path accessibility and can infer it later based on new data. We also consider the changes in dynamics of the surface vibration via sensor data due to different positioning of the smartphones and wearable devices such as hand, lap, pocket, or attached to the wheelchair armrest or near the footrests.
Accessible routing algorithm
An algorithm for accessible routing takes a graph as input (built based on the local area map) and outputs the top three routes from a source to a destination. Our routing algorithm can generate the best routes for wheelchair users using the surface and slope information updated in the OSM. Routing in MyPath is being implemented using the open-source GraphHopper system [7]. GraphHopper is an open-source road routing engine than can work be run on server, mobile and desktop environments. Their API features geocoding, map matching, routing and route optimization. By creating our own server, it is possible to query GraphHopper over HTTP and obtain routes for display in an Android and IOS application. The most important parameters for a wheelchair user would be which surfaces are accessible, which pathways can the user go (excluding highways and busy roads), as well as elevation and curb size the wheelchair can travel. The stored OSM information will assist in finding the optimal route for different types of devices.
EXPERIMENTS & RESULTS
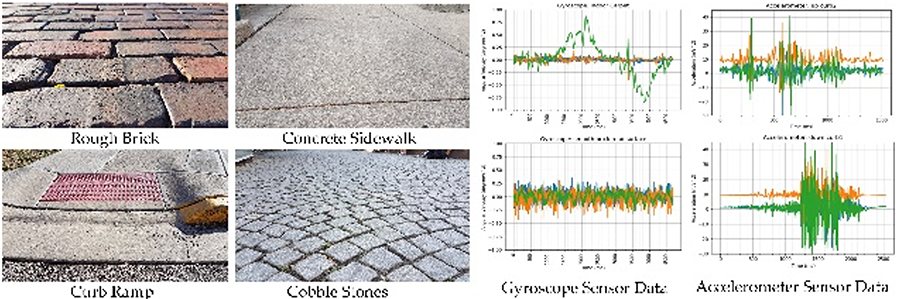
We have carried out significant experiments with MyPath system using a single smartphone attached to the wheelchair and classified 32 different surfaces found across Austria, China, France, Germany, India, and the USA, using 32 subjects of varied age groups and physical capabilities using both manual and power wheelchairs and various types of smartphones (Android and iOS). Fig. 5 shows how the accelerometer and gyroscope sensors of a smartphone can capture various vibration patterns characteristic to different surfaces. We have applied six different ML algorithms on the collected vibration data (with varying sample size and frequency). We have achieved 96% accuracy in surface classification using both accelerometer and gyroscope sensor-data and 92.3% accuracy using only accelerometer sensor-data. The results surely prove the robustness of the proposed MyPath system. We have further tested our system for a real-time surface classification during which data were collected on a continuous basis across 6 different indoor and outdoor surfaces and classified on-the-fly. These data collection sites are different from those where the training-testing dataset was collected before, and yet we achieved an accuracy of 82-86% for real-time surface classification.
CONCLUSION
Individuals with mobility impairments face a wide range of barriers during their day-to-day ambulation which challenge their independence. To provide efficient travel experiences to mobility-challenged individuals, especially for wheelchair users, different path characteristics (such as presence of sidewalk and curb ramps, type of surface, etc.) are considered. We developed a novel system called MyPath, which leverages ML techniques to actively learn the vibration patterns induced by different surfaces across the built environment and classify them to provide an end-to-end accessible routing solution.
REFERENCES
- Types of disabilities (american communities survey). www.census.gov/programs-surveys/acs/, 2017. Accessed on Feb 2022.
- ADA. Americans with Disabilities Act (ADA) Standards for Accessible Design, 2010.
- D. Ding, B. Parmanto, H. A. Karimi, D. Roongpiboonsopit, G. Pramana, T. Conahan, and P. Kasem- suppakorn. Design considerations for a personalized wheelchair navigation system. In Engineering in Medicine and Biology Society, 2007. EMBS 2007. 29th Annual International Conference of the IEEE, pages 4790–4793. IEEE, 2007.
- D. Dˇzafi´c, P. Schoonbrood, D. Franke, and S. Kowalewski. ENav: A suitable navigation system for the disabled, pages 133–150. Springer, 2017.
- J. Edinger, A. Hofmann, A. Wachner, C. Becker, V. Raychoudhury, and C. Krupitzer. Wheelshare: Crowd-sensed surface classification for accessible routing. In 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), pages 584–589, March 2019.
- M. O. Gani, V. Raychoudhury, J. Edinger, V. Mokrenko, Z. Cao, and C. Zhang. Smart surface classi- fication for accessible routing through built environment: A crowd-sourced approach. In Proceedings of the 6th ACM International Conference on Systems for Energy-Efficient Buildings, Cities, and Trans- portation, BuildSys '19, page 11–20, New York, NY, USA, 2019. Association for Computing Machinery.
- P. Karich and S. Schroder. Graphhopper directions api with route optimization (2017), 2009.
- H. A. Karimi, L. Zhang, and J. G. Benner. Personalized accessibility map (pam): A novel assisted wayfinding approach for people with disabilities. Annals of GIS, 20(2):99–108, 2014.
- H. Matthews, L. Beale, P. Picton, and D. Briggs. Modelling access with GIS in urban systems (magus): capturing the experiences of wheelchair users. Area, 35(1):34–45, 2003.
- OpenStreetMap. Planet OSM Files, https://planet.openstreetmap.org/ Date Accessed: Feb 23, 2022.
- PathVu. PathVu.com. Date Accessed: Feb 23, 2022
- C. Prandi, P. Salomoni, and S. Mirri. mpass: integrating people sensing and crowdsourcing to map urban accessibility. In Proceedings of the IEEE international conference on consumer communications and networking conference, pages 10–13, 2014.
- M. S. Rahaman, Y. Mei, M. Hamilton, and F. D. Salim. Capra: A contour-based accessible path routing algorithm. Information Sciences, 385:157–173, 2017.
- A. D. Sobek and H. J. Miller. U-access: a web-based system for routing pedestrians of differing abilities. Journal of geographical systems, 8(3):269–287, 2006.
- T. V¨olkel, R. Ku¨hn, and G. Weber. Mobility impaired pedestrians are not cars: Requirements for the annotation of geographical data. In International Conference on Computers for Handicapped Persons, pages 1085–1092. Springer, 2008.
- T. V¨olkel and G. Weber. Routecheckr: personalized multicriteria routing for mobility impaired pedes- trians. In Proceedings of the 10th international ACM SIGACCESS conference on Computers and accessibility, pages 185–192. ACM, 2008.
ACKNOWLEDGMENT
This work is partially funded by the NIDILRR Field Initiated Projects Development (grant90IFDV0024).