Study on standardization of robotic wheelchair
Soonjae Ahn, Inhyuk Moon
Department of Robot Engineering, Dong-Eui University, Korea
Institute of Smart Rehabilitation Engineering and Assistive Technology, Dong-Eui University, Korea
INTRODUCTION
In recent years, a remarkable transformation in mobility assistance technology has been witnessed through the advancement of robotic wheelchairs [1]. Contemporary market offerings showcase this technological evolution, with innovative models like the WHILL Model Ci, Permobil F5 Corpus, and Invacare AVIVA STORM RX introducing sophisticated capabilities in autonomous navigation, environmental adaptation, and safety features [2, 3]. The impact of these advanced mobility solutions extends beyond basic transportation, significantly enhancing users' ability to engage in professional activities, social interactions, and daily tasks [4]. Furthermore, robotic features have demonstrated notable benefits in reducing physical stress for users and their caregivers, contributing to improved overall health outcomes and life quality [5]. However, the path to market implementation faces substantial obstacles, primarily centered around the need for established evaluation criteria and testing methodologies [6]. The absence of unified standards complicates the design and production processes, making it difficult to establish consistent quality benchmarks [7]. These variations can affect user trust and impede broader market acceptance of robotic wheelchair technology [8]. A critical aspect of this standardization effort involves defining the Degree of Autonomy for robotic wheelchairs, drawing parallels with autonomous vehicle classification systems [9]. The Korean Ministry of Food and Drug Administration's implementation of autonomy levels for wheelchair systems provides a valuable reference point for risk management frameworks within these standards.
ROBOTIC WHEELCHAIR
Definition and type of robotic wheelchair
Robotic technology is defined as “practical application knowledge commonly used in the design of robots or their control systems, especially to raise their degree of autonomy” in ISO 8373 [11]. Also, autonomy is defined as the “ability to perform intended tasks based on current state and sensing, without human intervention” in ISO 8373 [11]. Thus, a robotic wheelchair can be defined as “an electric wheelchair with robotic technology.” The field of robotic wheelchairs encompasses two main approaches: wheelchairs with built-in robotic systems and conventional wheelchairs modified with robotic components. The South Korean Ministry of Food and Drug Safety has established a classification system with 17 categories, considering autonomous capabilities and robotic functionalities. This classification ensures that each type meets specific safety and performance requirements.
Safety requirements
Safety requirements for robotic wheelchairs cover electrical safety, mechanical safety, cleaning and disinfection, environmental factors, and hazardous materials. While ISO 7176 provides guidelines for basic wheelchair safety, robotic elements require additional safety features like emergency and protective stop functions. Requirements for hazardous substances specifically address parts of the robot that come into contact with the human body. The allowable values for these substances are based on the Korean Certification (KC) standards for children's products [12].
Performances
Robotic wheelchair performance evaluation encompasses two key aspects: the system's ability to navigate effectively through different environmental conditions and its obstacle avoidance capabilities. For detailed performance evaluation metrics and their corresponding standardized requirements, readers can refer to the comprehensive specifications presented in Table 1.
Table 1. Requirements of Performance
| Number | Items | Detailed Items | Reference Standard |
|---|---|---|---|
| 1 | Scenario-based navigation performance | Task success rate | KS B 7314 [13] |
| 2 | Driving speed | KS B 7314 [13] | |
| 3 | Driving reaction time | KS B 7314 [13] | |
| 4 | Deviation from the driving path | ||
| 5 | Returning home position | IEC 62849 [14] | |
| 6 | Obstacle avoidance | Avoidance of collision with obstacles | - |
| 7 | Avoidance rate for static obstacles | KS B 7312 [15] | |
| 8 | Avoidance rate for dynamic obstacles | KS B 7312 [15] |
A standardized testing methodology assesses how effectively a robotic wheelchair navigates around stationary and moving obstacles to evaluate its autonomous navigation capabilities. Table 2 outlines the test obstacle specifications, enabling manufacturers to verify compliance with performance requirements.
Table 2. Requirements of obstacles
| Type | Size (mm) | Reference |
|---|---|---|
| Static obstacle | R: 180 ± 10, L: 1040 ± 10 | KS B 7312 |
| Dynamic obstacle | R: 180 ± 10, L: 1400 ± 20 | KS B 7312 |
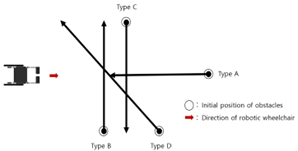
The testing environment includes moving obstacles with four directional patterns, as shown in Figure 1: Forward movement (type A), Traverse movement (types B and C), and Diagonal movement (type D). Without manufacturer specifications, obstacles maintain a 2 m minimum separation and move at (1.0 ± 0.1) m/s, using standard dimensions from Table 2.
Place dynamic and static obstacles after completing the environmental map
Position the wheelchair at the start point and initiate autonomous navigation
Record navigation time over five trials
Measure the difference between the target and the actual arrival position

Navigation exceeding triple the estimated driving time is considered a failure.
Degree of autonomy (DOA)
For robotic-enabled electric wheelchairs, the Korean Ministry of Food and Drug Administration has established autonomy classifications, with specific Degree of Autonomy (DOA) levels detailed in Table 3.
Table 3. Degree of Autonomy (DOA)
| Level | Level 0 No Automation |
Level 1 Driver Assistance |
Level 2 Advanced Driver Assistance |
Level 3 Conditional Automation |
Level 4 Highly Autonomous System |
Level 5 Fully Autonomous System |
|---|---|---|---|---|---|---|
| Situational Awareness | Users must always monitor the situation | Users must monitor the situation as necessary | Drivers do not have to monitor the situation | |||
| Automation Items | - | Steering or speed | Steering and speed | |||
| Usage Environment | - | Limited indoors | Indoor or outdoor | Indoor and outdoor | ||
Discussion
Robotic wheelchair technology is revolutionizing mobility assistance, offering unprecedented benefits for individuals with limited mobility. These advanced systems provide enhanced autonomy through features like autonomous navigation and obstacle detection while reducing the physical demands placed on caregivers. However, the rapid advancement of robotic wheelchair technology has created a notable challenge in the industry: developing appropriate standards has not kept pace with technological innovation. While traditional wheelchairs operate under well-established safety protocols, integrating robotic features introduces new complexities that current standards do not fully address. The need for standardization becomes increasingly critical as market demand for robotically enhanced electric wheelchairs grows. Comprehensive testing protocols and standardized procedures would ensure consistent product quality, minimize safety risks, and establish clear manufacturing guidelines. A key component of this standardization effort involves developing a structured framework for evaluating autonomous capabilities in robotic wheelchairs. Drawing parallels from the autonomous vehicle industry's approach to categorizing self-driving capabilities, establishing precise Degree of Autonomy (DOA) levels is essential. The Korean Ministry of Food and Drug Safety has taken steps in this direction by developing specific guidelines for autonomy classification.
CONCLUSION
Our research has developed a robust framework for defining robotic wheelchair requirements. The framework incorporates service robot performance standards and addresses unique system challenges. We referenced ISO 13482 [16] for mechanical safety considerations and IEC 80601-2-78 [17] for addressing risks related to situational awareness, as users operate these devices without professional training. The development of standardized safety evaluation protocols enables manufacturers to ensure product safety throughout development and deployment while providing a foundation for regulatory frameworks and licensing procedures.
Acknowledgment
This work was supported by the Korea Medical Device Development Fund grant funded by the Korea government (the Ministry of Food and Drug Safety) (Project Number: RS-2023-00210652).
REFERENCES
[1] Schreiter, J., Schott, D., Schwenderling, L., Hansen, C., Heinrich, F., & Joeres, F. (2022). AR-supported supervision of conditional autonomous robots: Considerations for pedicle screw placement in the future. Journal of Imaging, 8(10), Article 255.
[2] Leaman, J., & La, H. M. (2017). A comprehensive review of smart wheelchairs: Past, present and future. IEEE Transactions on Human-Machine Systems, 47(4), 486-499.
[3] Boucher, P., Atrash, A., Kelouwani, S., Honoré, W., Nguyen, H., Villemure, J., Routhier, F., Cohen, P., Demers, L., Forget, R., & Pineau, J. (2013). Design and validation of an intelligent wheelchair towards a clinically-functional outcome. Journal of NeuroEngineering and Rehabilitation, 10, Article 58.
[4] Cowan, R. E., Fregly, B. J., Boninger, M. L., Chan, L., Rodgers, M. M., & Reinkensmeyer, D. J. (2012). Recent trends in assistive technology for mobility. Journal of NeuroEngineering and Rehabilitation, 9, Article 20.
[5] Burhanpurkar, M., Labbé, M., Guan, C., Michaud, F., & Kelly, J. (2017). Cheap or robust? The practical realization of self-driving wheelchair technology. In 2017 International Conference on Rehabilitation Robotics (ICORR) (pp. 1079-1086). IEEE.
[6] Pineau, J., West, R., Atrash, A., Villemure, J., & Routhier, F. (2010). Towards a standardized test for intelligent wheelchairs. In Proceedings of the 10th Performance Metrics for Intelligent Systems Workshop (PerMIS '10) (pp. 169-174). Association for Computing Machinery.
[7] Jerzy, A. (n.d.). Development of safe and secure control software for autonomous mobile robots.
[8] Simpson, R. (2005). Smart wheelchairs: A literature review. Journal of Rehabilitation Research and Development, 42(4), 423-436.
[9] Wen, W., Kuroki, Y., & Asama, H. (n.d.). The sense of agency in driving automation.
[10] Trivedi, A. R., Singh, A. K., Digumarti, S. T., Fulwani, D., & Kumar, S. (2013). Design and implementation of a smart wheelchair. In Proceedings of Conference on Advances In Robotics (AIR '13) (pp. 1-6). Association for Computing Machinery.
[11] International Organization for Standardization. (2021). Robots and robotic devices — Vocabulary (ISO 8373:2021).
[12] Korean Agency for Technology and Standards. (n.d.). Special Act on The Safety of Children's Products Annex 6 (Toys – 21.7.1).
[13] Korean Standards Association. (n.d.). Navigation performance evaluation method for indoor service robots – Teaching assistant robots (KS B 7314).
[14] International Electrotechnical Commission. (2016). Performance evaluation methods of mobile household robots (IEC 62849).
[15] Korean Standards Association. (n.d.). Test method for obstacles avoidance of indoor mobile robots (KS B 7312).
[16] International Organization for Standardization. (2014). Robots and robotic devices — Safety requirements for personal care robots (ISO 13482:2014).
[17] International Electrotechnical Commission. (2020). Medical electrical equipment - Part 2-78: Particular requirements for basic safety and essential performance of medical robots for rehabilitation, assessment, compensation or alleviation (IEC 80601-2-78).