Power wheelchair instrumentation to assess mobility performance: Preliminary accuracy evaluation
Iyan Nekib1,2, Keshav Mukherjee2, Shantanu Satpute1,2, Jorge L Candiotti2
1 Swanson School of Engineering, University of Pittsburgh, Pittsburgh, PA
2 Veterans Affairs Pittsburgh Healthcare System and Human Engineering Research Laboratories, Pittsburgh, PA
INTRODUCTION
The increase in power wheelchair accidents and injuries has been associated with wheelchair-using behaviors when navigating real-world conditions [1, 2]. A major contributing factor is insufficient training for power wheelchair driving resulting in suboptimal driving skills [1, 3] that not only hampers the users’ driving proficiency, but also reduces their level of independence [4], induces isolation, and wheelchair abandonment.
Various wheelchair driving skills assessment tools such as the Wheelchair Skills Test (WST), and Power Mobility Driving Assessment (PMDA) have been developed to assess the safety and capacity of new wheelchair users [2, 4, 5]. While these assessment tools use an ordinal scoring scale to quantify wheelchair driving skills; the outcomes can be influenced by the clinician’s interpretation of the scoring system and experience in wheelchair prescription [6]. Kamaraj et al. underscored the importance of identifying quantitative driving metrics to aid clinicians and wheelchair users with personalized wheelchair skills training programs. His research demonstrated motion capture systems for wheelchair driving quantification; however, this approach is impractical for clinical settings due to space limitations and the time required for setup and analysis [7].
The proposed study aims to address the challenge of assessing wheelchair driving performance with the instrumentation of power wheelchairs to capture key driving metrics. The study introduces an integrated data acquisition (DAQ) system embedded within a power wheelchair and evaluates its accuracy in quantifying wheelchair driving metrics. The overarching goal is to provide individuals and clinicians with a reliable and user-friendly tool for tracking wheelchair driving skills, both in clinical settings and at home, hence enhancing mobility and safety in everyday indoor environments.
A. Materials
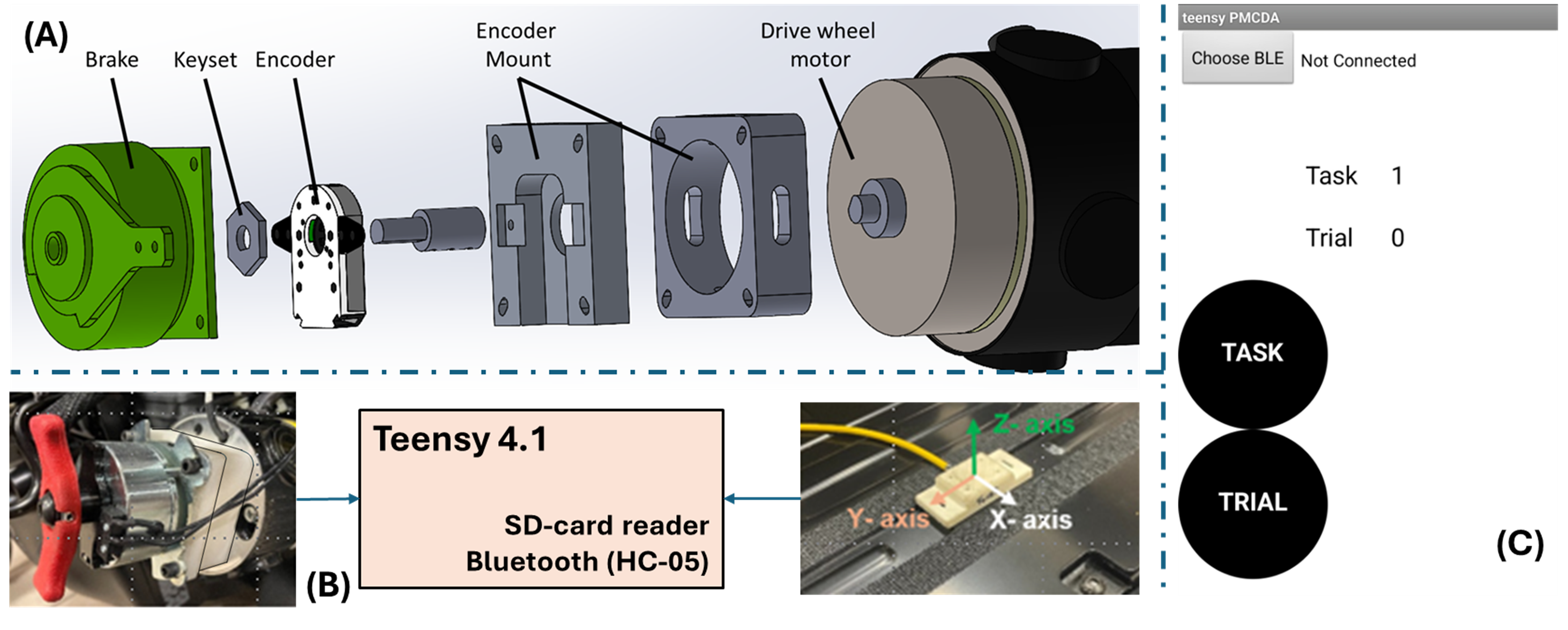
An add-on DAQ system was designed for easy attachment to different power wheelchairs and to record quantitative driving metrics. The DAQ system integrated an embedded system Teensy 4.1 (PJRC, Oregon, USA) attached to an encoder (AMT102-V) in each driving wheel to measure the wheelchair speed, and an Inertial Measurement Unit, IMU (BNO055) placed under the seat to measure the seat orientation, rotation, and acceleration (Figure 1). Additionally, the DAQ included an SD card reader for storage and bluetooth capabilities to record metrics per driving task via a mobile app. The encoder data was translated into linear speed and distance using equations derived from the unicycle model - kinematics equations commonly used to describe the speed and orientation of differential drive systems such as power wheelchairs:
The equations represented the linear displacement (x and y) of the wheelchair in two axes, ul and ur were the left and right wheels angular velocities, respectively, and θ was the rotational displacement. The integration of θ accounted for the accumulated rotational displacement over time. The following key driving metrics were identified by Kamaraj et al [7] to assess wheelchair driving skills in terms of safety and efficiency in specific driving tasks. These quantitative metrics were calculated by the sensors and interface integrated into the DAQ system: Average Velocity (m/s): The velocity is determined by the change in position over time. A consistent velocity demonstrates safe and efficient driving practice as well as minimum number of user corrections. Velocity was calculated with encoders. Pitch and roll angles: Indicate the forward/backward and lateral inclinations of the seat calculated using the IMU. Stability is considered if seat angles remain within tipping thresholds of common wheelchairs (ISO7176-1,2). Yaw Angle: Indicates the wheelchair orientation around its vertical axis and recorded using the IMU. Stability in yaw angle indicates controlled turns or straight paths, depending on driving task, minimizing abrupt movements and possible deviations from a path. Time (s) and Traveled distance (m) were also monitored as potential driving metrics to monitor community mobility in future work.
B. Protocol
The accuracy of the DAQ system was evaluated by attaching its IMU and encoders on the seat pan and driving motors of a mid-wheel drive Group 3 power wheelchair, respectively (Figure 1). The wheelchair was operated by a research team member in three structured driving tasks that simulated real-world conditions [7] for three trials (Figure 2). The driving tasks included driving straight for 10 meters, executing a 90-degree turn, and ascending/descend a 6-degree ramp. The three trials were averaged and systematically compared against the real values and to assess the accuracy and precision of the quantitative driving metrics resulting in wheelchair user's driving performance.
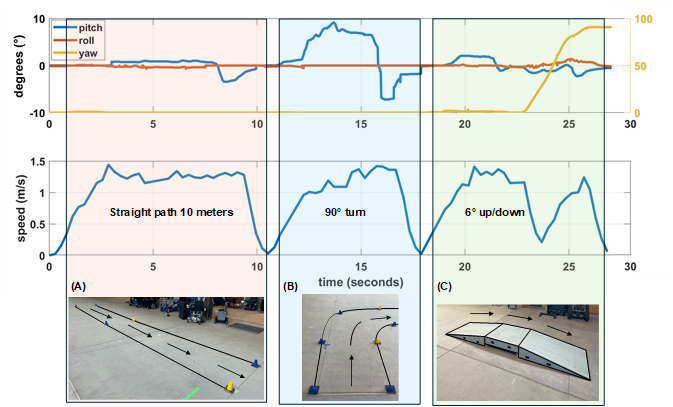
Table 1 and Figure 2 showed the accuracy evaluation results of the quantitative driving metrics for each driving task. The results showed high precision and low accuracy for particular tasks. An average speed difference of 0.16 m/s, travelled distance difference of 0.23 meters, and average completed time difference of 1.9 seconds were reported across all driving tasks. In addition, wheelchair orientation showed 1.1° difference when driving on the 90° turn task and 0.5° difference on the 6° ramp.
Table 1: Task based quantitative driving metrics
| Accuracy | Driving Straight 10m | Ascend/Descend 6° slope | 90° Turn Driving Forward | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Real value | Recorded | Absolute Offset | Real values | Recorded | Absolute Offset | Real values | Recorded | Absolute Offset | |
| Average Speed (m/s) | 1.2 | 1.0 ± 0.1 | 0.2 | 1.09 | 0.9 ± 0.1 | 1.0 | 0.9 | 0.8 ± 0.2 | 0.1 |
| Time (s) | 9.2 | 10.6 ± 0.3 | 1.4 | 6.3 | 8.1 ± 0.6 | 1.8 | 8.2 | 10.6 ± 2.0 | 2.4 |
| Pitch | 0.0 | 0.0 ± 0.0 | 0.0 | 6.0 | 6.5 ± 0.2 | 0.5 | 0 | 0.5 ± 0.0 | 0.5 |
| Roll | 0.0 | 0.1 ± 0.2 | 0.1 | 0.0 | 0.0 ± 0.0 | 0.0 | 0 | 0.1 ± 0.0 | 0.1 |
| Yaw | 0.0 | 0.1 ± 0.2 | 0.1 | 0.0 | 0.1 ± 0.1 | 0.1 | 90.0 | 88.9 ± 2.7 | 1.1 |
| Traveled Distance (m) | 10.0 | 10.9 ± 0.1 | 0.9 | 6.9 | 6.9 ± 0.1 | 0.0 | 7.4 | 7.8 ± 0.1 | 0.4 |
DISCUSSION
The results demonstrated the accuracy of our DAQ system in quantifying the driving performance of wheelchair users, particularly in the domains of safety and task efficiency. The difference between real and recorded values were in decimal digits, suggesting that accuracy error might be negligible to offer clinical interpretation of the wheelchair user driving performance. One notable observation was the pitch high peak when ascending and descending a 6° ramp (Figure 2), which reflects the real wheelchair inclination affected by the acceleration when transitioning between surface inclination, shift in center of mass, and possibly required seat adjustment. Notably, our study emphasizes that a comprehensive understanding of driving skills for various tasks necessitates considering multiple quantitative driving metrics. Currently, the study was limited to an experienced wheelchair user; therefore, the results did not display trajectory deviation. Future work will involve demonstrating the difference in experienced and new wheelchair users using quantitative driving metrics. Additionally, while these findings highlight the system's potential, they remain preliminary. Further validation is necessary to associate the recorded metrics with clinical recommendations aimed at improving wheelchair mobility performance. Such advancements would provide meaningful insights for clinicians and promote more effective interventions for wheelchair users. While our DAQ system proficiently recorded essential driving metrics, it has the capability to record additional variables as an avenue for applications outside of driving skills assessment. For example, our IMU records acceleration in three axes that can be translated to assess whole-body vibration exposure and prevent potential long-term musculoskeletal injuries [8]. Likewise, Cooper's insights on using distance traveled as a metric for understanding user activity [9] are particularly relevant, providing valuable considerations for maintenance and navigation in power wheelchairs. Similarly, Džafić's emphasis on optimizing energy consumption during route planning resonates with our exploration of driving metrics, highlighting the necessity for innovations in accessibility mapping and navigation improvement for power wheelchairs [10]. Our system's ability to capture driving metrics opens up possibilities for enhancing wheelchair user engagement and autonomy. By developing user-friendly interfaces and applications, wheelchair users could access personalized reports on their driving efficiency. This empowerment allows users to self-monitor and optimize their driving skills without relying on external clinicians, fostering independence and proactive healthcare management. However, integrating these metrics into broader clinical practices will require further research to confirm their applicability and significance in diverse wheelchair user populations.
CONCLUSION
The utilization of a data acquisition system using IMU sensors and mounted encoders shows considerable potential in standardizing the assessment of power wheelchair driving skills. Moving forward, our next steps involve establishing construct validity of identified metrics into clinical outcomes of driving performance and reduce clinician’s experience bias. While the current results demonstrate the system’s ability to accurately quantify driving performance, they remain preliminary. Future studies will aim to associate these metrics with clinical recommendations to further enhance wheelchair mobility performance and develop comprehensive training protocols for both experienced and novice users. This will enable implementing our protocol in a larger sample of power wheelchair users, contributing to a deeper understanding and accessibility of electric power wheelchair driving proficiency and enhancing mobility outcomes for individuals with mobility impairments.
ACKNOWLEDGMENT
This work was funded by the VA Career Development Awards (#A3806). The contents do not represent the views of the U.S. Department of Veterans Affairs or the United States Government.
REFERENCES
[1] Chen, W. Y., Jang, Y., Wang, J. D., Huang, W. N., Chang, C. C., Mao, H. F., & Wang, Y. H. (2011). Wheelchair-related accidents: relationship with wheelchair-using behavior in active community wheelchair users. Archives of physical medicine and rehabilitation , 92 (6), 892-898.
[2] Kirby, R. L., Miller, W. C., Routhier, F., Demers, L., Mihailidis, A., Polgar, J. M., ... & Sawatzky, B. (2015). Effectiveness of a wheelchair skills training program for powered wheelchair users: a randomized controlled trial. Archives of physical medicine and rehabilitation , 96(11), 2017-2026.
[3] Fehr, L., Langbein, W. E., & Skaar, S. B. (2000). Adequacy of power wheelchair control interfaces for persons with severe disabilities: A clinical survey. Journal of rehabilitation research and development, 37(3), 353-360.
[4] Massengale, S., Folden, D., McConnell, P., Stratton, L., & Whitehead, V. (2005). Effect of visual perception, visual function, cognition, and personality on power wheelchair use in adults. Assistive Technology, 17(2), 108-121.
[5] Dawson, D., Chan, R., & Kaiserman, E. (1994). Development of the power-mobility indoor driving assessment for residents of long-term care facilities: A preliminary report. Canadian Journal of Occupational Therapy, 61(5), 269-276.
[6] Miro, J. V., Black, R., Andonovski, B., & Dissanayake, G. (2013, June). Development of a novel evidence-based automated powered mobility device competency assessment. In 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR) (pp. 1-8). IEEE.
[7] Kamaraj, D. C. (2021). Quantifying Electric Powered Wheelchair Driving Ability (Doctoral dissertation, University of Pittsburgh).
[8] Duvall, J., Cooper, R., Sinagra, E., Stuckey, D., Brown, J., & Pearlman, J. (2013). Development of surface roughness standards for pathways used by wheelchairs. Transportation research record , 2387 (1), 149-156.
[9] Cooper, R. A., Thorman, T., Cooper, R., Dvorznak, M. J., Fitzgerald, S. G., Ammer, W., ... & Boninger, M. L. (2002). Driving characteristics of electric-powered wheelchair users: how far, fast, and often do people drive?. Archives of physical medicine and rehabilitation, 83(2), 250-255.
[10] Džafić, D., Candiotti, J. L., & Cooper, R. A. (2020, July). Improving wheelchair route planning through instrumentation and navigation systems. In 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC) (pp. 5737-5740). IEEE.