User-centered development and open-sourcing of RoboCup, an assistive drinking device for wheelchair users
Thomas Kutcher1*, Rafe Neathery2*, Gary Lynn3, Melissa Cantú1, Maria Oden1
1Department of Bioengineering, Rice University, Houston, TX, USA; 2Department of Mechanical Engineering, Rice University, Houston, TX, USA; 3The Gary J Lynn Foundation, Houston, TX, USA; *These authors contributed equally
INTRODUCTION
The ability to drink water with independence and ease is a fundamental aspect of daily living. Yet, it is one that many of the 2.7 million wheelchair users in the United States struggle to achieve independently due to limited arm and hand dexterity. [1] For individuals with conditions like cerebral palsy, these motor limitations make the task of drinking water unaided nearly impossible, often requiring assistance from a caregiver.
This lack of drinking autonomy can lead to emotional and physical consequences for wheelchair users. [2] Many wheelchair users experience a diminished sense of dignity and confidence, and some risk chronic dehydration due to hesitancy in “burdening” caregivers with repeated requests for assistance. In a survey of physical therapists at The Institute for Rehabilitation and Research (TIRR) Memorial Hermann Hospital, all respondents who work with electric wheelchair users strongly agreed that there is an unmet medical need for an improved solution to facilitate independent drinking.
Existing assistive drinking devices, such as simple cup-and-straw solutions, aim to address this need but fall short. These devices require a static straw to be left near the user’s mouth, which can feel intrusive and restrict the user’s space. Also, they are often prone to leaking from the spout and are costly for what they are, with a basic cup-and-straw setup priced at around $90. [3] On the other end of the spectrum, advanced robotic options provide autonomous drinking support but are prohibitively large, overly complex for many users’ needs, and inaccessible to most patients financially, with costs exceeding $50,000 without insurance coverage. [4]
There is a clear gap for a user-friendly assistive drinking solution that can meet the needs of wheelchair users without encroaching on their personal space or imposing a financial burden. Such a solution has the potential to enhance the quality of life for both users and their caregivers.
In this paper, we present the user-centered design of RoboCup, a robotic assistive drinking device developed with and for wheelchair users with limited dexterity. The design process is centered on the needs of a patient with spastic quadriplegic cerebral palsy, who identified this gap after finding an existing cup-and-straw solution inadequate for his needs. We also incorporated input from multiple physical therapists who work with electric wheelchair users and tend to their hydration needs. Finally, we validate the utility of our open-source RoboCup prototype through feedback from the patient, his caregiver, and physical therapists, demonstrating its suitability for our target users.
METHODS
We employed a systematic, iterative engineering design approach, incorporating idea evaluation with Pugh matrices and rapid prototyping via SolidWorks CAD and Arduino. [5] Interviews with a cerebral palsy patient and their caregiver informed four key design constraints (Table 1), which we referenced to evaluate our prototypes. We prioritized reliability—ensuring the device would function all day—and ease of cleaning. Accessibility was also key, as we aimed to create a device that could fit various wheelchair models while remaining affordable.
Table 1. RoboCup Design Constraints
|
Constraint |
Definition |
|
Adaptable |
Can swap out different features to fit the user, fits on different wheelchairs |
|
Reliable |
Battery lasts all day, contains enough water for minimal refills, functions for ³ 1 year |
|
Sanitary |
Device can be disassembled easily for cleaning |
|
Low-cost |
Base design is affordable in comparison to current cup-and-straw market solutions |
As part of our user-centered design process, an initial prototype underwent a 3-month user test by the patient and their caregiver. We subsequently integrated their qualitative feedback to improve the RoboCup design. The final prototype was user-tested again for 3 months.
In addition to obtaining target user feedback, we also sought feedback from a focus group of physical therapists from TIRR Memorial Hermann who work with electric wheelchair users; they were surveyed with Likert scales to assess usability of our final design by the target user.
RESULTS
RoboCup meets user-centered design criteria
The final RoboCup design (Figure 1) demonstrated high adaptability, meeting diverse user needs through straightforward customizations requiring no technical expertise. [6] The device is compatible with various cupholder clamps to fit a variety of wheelchair models, while the straw's length and diameter can be adjusted to accommodate different torso heights, lung strengths, and beverage preferences, such as smoothies. Depending on hand dexterity, users can choose between a button or a touch-free proximity sensor to trigger straw rotation. The sensor or button can be positioned anywhere on the wheelchair for optimal accessibility and comfort. Optional components, including a check valve and bite valve, can be excluded when DIY-ing RoboCup to reduce costs and simplify assembly. Similarly, users can substitute a plastic bottle for a metal thermos to further lower costs.
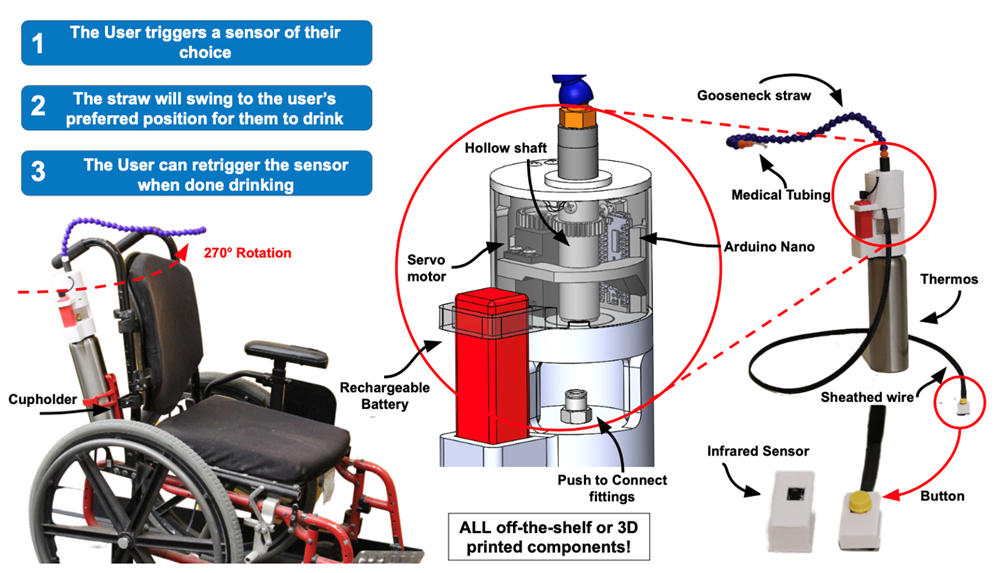
During testing, RoboCup proved reliable. It holds up to 1 liter of water and operates for >16 hours on a single charge, minimizing caregiver involvement. Battery efficiency is maximized as the servo motor is programmed to draw power only when activated. Cycle-testing showed the mechanism could withstand over 400 consecutive rotation cycles (3+ hours) without malfunctions. Long-term reliability was validated through daily use by a cerebral palsy patient over a 3-month period, during which no issues were reported. The straw's 270-degree rotation capability ensures it stows neatly parallel to the wheelchair's back, while its ability to rotate against gravity without leaking ensures functionality even when the wheelchair is tilted at an incline. RoboCup also prioritizes sanitation. Its design allows for quick disassembly for cleaning in under a minute, with all non-electrical, non-3D-printed components being dishwasher-safe. The integrated bite valve further ensures hygiene by minimizing spout leakage. Lastly, RoboCup is cost-effective, at $188.64 - $223.76 for one unit, while offering advanced functionality compared to static alternatives costing approximately $90 and costing significantly less than generalized robotic devices. [3,4] While TIRR physical therapists suggested a target price of $50–$100, the device remains within a reasonable range given its features. Costs decrease further through mass manufacturing by buying items in bulk (Table 2). The parts list exists on the RoboCup website. [6]
Table 2. RoboCup price per unit with individual and bulk manufacturing
|
Price (x1) |
Price (x3) |
Price (x10) |
|
|
No optional additions |
$188.64 |
$114.20 |
$105.41 |
|
All optional additions |
$223.76 |
$151.65 |
$143.33 |
Positive stakeholder feedback on the final design
The final RoboCup design received positive feedback from stakeholders, including physical therapists (Figure 2) and target users, highlighting its functionality, medical benefits, and aesthetics.
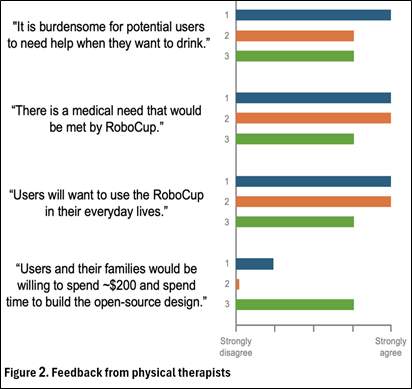
Functionality: Physical therapists and users praised RoboCup for its practicality. Of the 3 therapists surveyed, 100% agreed that RoboCup would be desirable for daily use. (Figure 2) During user-testing, the device was especially valued for its effectiveness during road trips, allowing the user to drink independently without requiring the caregiver to stop and assist. In the survey, 100% of therapists strongly agreed or agreed that RoboCup meets a medical need. (Figure 2) Some patients limit their water consumption to avoid frequently asking for assistance, which can lead to dehydration. One therapist noted that “increased accessibility [to water] will assist with meeting hydration needs and increase functional independence.” Therapists also emphasized RoboCup’s potential to enhance autonomy for users while reducing caregiver burden.
Aesthetics: Stakeholders commended RoboCup for its compact and non-intrusive design, which does not hinder wheelchair maneuverability through doorways. Unlike many assistive drinking solutions that resemble sippy cups, RoboCup avoids such stigmatizing designs for adult users. Early prototypes, which used a water bag or camelback container as opposed to a thermos or bottle, were found to be uncomfortable and unattractive; the bag swung and shifted during movement. The final thermos-based design resolved this issue. Users also appreciated the straw’s sturdy and rigid construction, which conveyed durability.
Open-sourced final design
To maximize accessibility, RoboCup has been fully open-sourced. The design exclusively uses 3D-printed and off-the-shelf components, enabling anyone with access to a 3D printer to build and customize the device. Comprehensive, user-friendly assembly instructions, complete with detailed images, have been made available online. [6] This online guide includes a full parts list, 3D models, and a GitHub repository. [6] This documentation empowers users and organizations to adapt RoboCup to their needs while promoting widespread adoption and further improvement.
DISCUSSION
RoboCup has the potential to restore confidence and autonomy in this essential aspect of daily living. Feedback from TIRR physical therapists confirmed the medical need for such a device, as well as its appeal to potential users. A critical factor in achieving RoboCup’s functionality was the iterative design process informed by diverse feedback, including focus groups, interviews, video demonstrations, and quantitative surveys. User-testing was particularly invaluable in refining the design.
Despite its successes, RoboCup has limitations. One notable constraint is its cost. While the open-source nature of the design ensures accessibility for those with access to a 3D printer, the $223.76 price tag exceeds the $50–$100 range preferred by therapists. Surveyed therapists (Figure 2) expressed skepticism about users’ willingness to invest this amount of money and time to build the device, with one strongly disagreeing, one disagreeing, and only one agreeing. Addressing this feedback, future iterations could explore more cost-effective components or simplified designs to cater to users across all socioeconomic backgrounds. Additionally, while RoboCup aimed to maximize accessibility by open sourcing, many potential users may not have the means or capabilities of making the device. Another limitation is the scope of feedback. While feedback from therapists and a cerebral palsy patient was instrumental, a broader range of stakeholders—such as individuals with other mobility impairments or clinicians from diverse settings—could have provided a more comprehensive evaluation.
Future work on RoboCup could expand its functionality and user base. For instance, incorporating speech commands to trigger straw rotation could make the device accessible to individuals with severe paralysis. Similarly, adapting the design for hospital bed use could address hydration challenges in additional patient populations. Both of these features were suggested by a focus group of physical therapists. However, these enhancements would need to balance functionality with the other design criteria listed in Table 1 to maintain accessibility.
CONCLUSION
RoboCup is a robotic assistive drinking device designed to empower wheelchair users with limited upper body dexterity. Developed through a user-centered, iterative design process, RoboCup incorporated invaluable feedback from key stakeholders, including a spastic quadriplegic cerebral palsy patient, his caretaker, and physical therapists who work with wheelchair users. The final design successfully met all user-centered design criteria, addressing functionality, adaptability, and usability, while earning positive feedback from stakeholders. By open-sourcing RoboCup as a DIY solution using only off-the-shelf and 3D-printed components, we have ensured its accessibility to a wide audience, promoting greater independence and quality of life for individuals with limited mobility. This approach underscores the potential for inclusive design in assistive technologies.
REFERENCES
[1] Koontz, A. M., Ding, D., Jan, Y.-K., de Groot, S., & Hansen, A. (2015). Wheeled mobility. BioMed research international. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4397418/
[2] Gignac, M. A. M., & Cott, C. (1998). A conceptual model of independence and dependence for adults with chronic physical illness and disability. Social Science & Medicine, 47(6), 739–753. https://doi.org/10.1016/s0277-9536(98)00149-x
[3] Fleximug. (n.d.). https://fleximug.com/
[4] Robotic arm. Kinova. (n.d.). https://assistive.kinovarobotics.com/product/jaco-robotic-arm
[5] Saterbak, A., & Wettergreen, M. (2021). Introduction to Engineering Design. Springer.
[6] Kutcher, T., & Neathery, R. (2023). RoboCup: Assistive drinking device for wheelchair users. OEDK. https://oedk.wildapricot.org/robocup