Bingqing Zhang![]() 1
1![]() , Harry Eberle
, Harry Eberle![]() 1
1![]() , Catherine Holloway
, Catherine Holloway![]() 1
1![]() , Tom Carlson
, Tom Carlson![]() 1
1![]()
![]() 1
1![]() University College London
University College London
INTRODUCTION
An intelligent or smart power wheelchair is normally built on a standard power wheelchair with additional modules for perception, navigation or interaction purposes [1]. It adds autonomy to the wheelchair and provides a technical solution to the safety concerns, thus opening the possibility for people who are considered not suitable to use a standard power wheelchair. Although the research in this field has been going on for decades, most of them focus on dealing with static or simple dynamic environments [1]–[4]. In addition, the role of the user is sometimes overlooked during the design and development process [1].
In our project, we aim to design a user-centred intelligent wheelchair and extend its application area to one of the most difficult scenarios faced by wheelchair users, navigating among crowds [9]. As we start the process of designing a smart wheelchair, we present the results of an initial study with expert wheelchair users' to gain insights into their design requirements and challenges when navigating in crowds.
METHOD
A qualitative exploratory study using semi-structured interviews and focus groups was conducted. The study was approved by UCLIC Research Ethics Committee.
In total, 15 wheelchair users were recruited, each with more than 8 years of experience. Participants had no cognitive or visual impairment and were English speakers. 12 participants took part in a 30-minute semi-structured interview while 3 joined a 1-hour focus group discussion. Table 1 shows the demographic data of the participants.
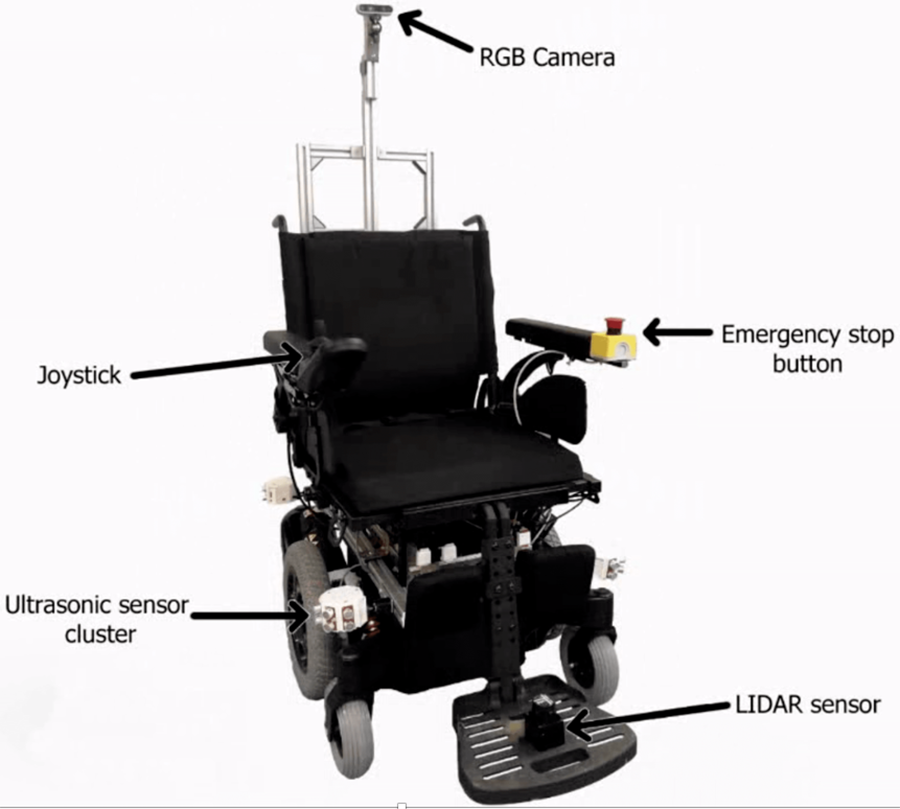
For the semi-structured interview, open-ended questions and probes were developed based on the previous studies and the researchers' experience. The questions started by asking about the wheelchair user's experience in driving in crowds, whether they find it difficult and how they managed in such a scenario. Participants were then shown an image of our intelligent wheelchair prototype (see Figure 2) together with a short explanatory video demonstrating a simulated wheelchair navigating in a crowded hall and street. We then asked general questions regarding opinions on such a wheelchair, followed by detailed questions related to specific features and potential challenges in various crowd scenarios. A similar process was taken for the focus group, while additional questions related to intelligent wheelchair ethics were asked. Each interview dataset was coded using NVivo and was analyzed for general impressions, emerging themes using thematic analysis [5].
| Wheelchair users(n=15) | |
|---|---|
Age |
46.3±12.2 |
Gender |
Female: n=4, Male: n=11 |
Experience |
24±9.3 years |
RESULT
After analysing the data, three themes emerged, each focusing on a challenging area.
Challenge 1: People's lack of awareness.
When analyzing the interview data, we noticed that crowds do not only emerge as one of the most difficult scenarios, but also one of the scenarios where most collisions happened. All participants admitted driving in crowds is a problem and that they all had collisions with people. However, 7 wheelchair users think the problem is more associated with people's lack of awareness and understanding of the wheelchair, rather than the control of the wheelchair itself. P1 described this as common in many crowded scenarios. "If you are in a wheelchair, you become invisible and people just don't see you…."(P1), "Especially in places such as airport and train stations, people may not see you and they will fall on you." (P3).
Some shared their strategies for dealing with "unresponsive people", which includes "increase the seat height"(n=3), "increase the driving speed so that people can notice me"(n=3) and "use my voice to warn people"(n=5). However, many of them admitted these are not the best solution and raised some concerns such as stability issues and social acceptance (See Table 2). When asked about adding an extra audio/visual system to the wheelchair, most interviewees think it could be helpful, but such a design should be effective and not obstructive.
|
Potential solution |
Concerns |
Increase the seat level |
Stability and transport difficulty |
Increase the driving speed |
Safety, social acceptance |
Additional audio/visual signals |
Draw too much attention |
Challenge 2 : Level of autonomy, safety and social capability
Participants' view of an intelligent wheelchair and their response towards desired features showed a challenge of balancing the level of autonomy, safety and the wheelchair's social capability.
In general, wheelchair users are supportive for the idea of automation, "If it is good, it can be safer and more time efficient."(P7), "Probably be able to react faster than I would be able to react."(P3), while most of them expressed the desire to have a certain degree of control, "I don't want it to be fully-autonomous, it will make me feel like a cargo. (P4)", "I prefer to have control over my wheelchair. It (the autonomy) should only come when needed, for example when I am tired. (P6)". Two wheelchair users pointed out that such autonomy should be designed based on the user's capability and have context awareness. P3 stated that the whole point of the smart technology is it should enhance what a user can already do.
An interesting finding comes from the crowd scenario. 5 participants showed some preference towards higher autonomy in complex environments such as crowds. "In crowds, maybe I don't want it to be shared-controlled as most probably it will keep stopping...It would be better if I can select some common routes and the chair will take me there automatically." (P7)
We further asked participants to imagine being in crowds, whether the wheelchair should have the capability of predicting surrounding pedestrians' trajectory and navigating in a social way. While most wheelchair users indicated their preference towards such a feature and thought it is desirable as it would cause minimum disturbance to other people, a small number of participants mentioned that they intentionally want to cause some disturbance in places such as busing shopping malls and social events, as a way to inform people of the occurrence of the wheelchair.
A few of them also voiced their concerns about such a feature. "It is still a challenge for the robot to predict pedestrians' future movement, so it makes more sense to simply follow someone. . . (P5)". P4 pointed out that the social capability is not only to understand the pedestrians, but also to understand its user's intention in a social context. "Sometimes the system doesn't realize that you have perceived an issue and they will do something that you think is irresponsible. For example, you could have a collision avoidance system that is doing the best to avoid you running into a wall, but actually you are trying to get closer to the wall because you are trying to avoid a child running on the pavement, and sometimes stopping might not be an easy option".
Challenge 3: Ethics
The discussion of self-driving car ethics has lasted for years. Similarly, the ethics of intelligent wheelchairs, especially their use in crowds, is still a challenge. However, as the speed limit for a power wheelchair (6km/h in UK) is much lower than the one for a car, the ethical dilemma of choosing between "protecting the user" (self-protective) or "save more lives" (utilitarian) may no longer exist, or at least lead to fewer consequences. Instead, an interesting ethics question here would be for a shared-controlled wheelchair where the user and the onboard intelligence are both involved in the decision making, what if the user's decision contradicts the system's decision. Under the assumption that the system's decision guarantees user safety, we noticed it could lead to two consequences: Pedestrian confusion and user confusion. P15 described the first consequence by raising concerns about being misunderstood. "When the wheelchair does something out of my intention and that causes unhappiness of other people, I don't want people to think it is what I intend to do and I'm a bad guy." In terms of the second consequence, most participants think although it is acceptable, it may make them feel uncomfortable and even lose trust in the system. On the other hand, this ethical question is closely related to our previous challenge of finding the right balance among safety, user autonomy, and social capability. As mentioned by P4, what if both the human and the wheelchair user's decisions can be supported but with different reasons? Although it is still a challenging question to answer, P13 highlighted that the system's decision should not be super-human. "I think if the wheelchair disobeys the user's command due to perceived danger, it should not do anything more than what competent (able-bodied) people would do on their own."
DISCUSSION
Examining the views of wheelchair users, we identified three challenges. Although an optimal solution to all the questions may not exist, we would like to propose some general requirements for the next stage of intelligent wheelchair design.
Requirement 1: Increase pedestrians' awareness with a technique that is effective but not obstructive.
Though improvement on the navigation algorithm is the key to guarantee safe driving in crowds, we believe it is equally important to make the wheelchair been "seen". To achieve this, our findings suggest that intuitive, effective and less disturbing ways of communication should be developed. This requirement is also supported by the findings from Kayukawa et al. (2019)'s work where they designed a navigation notification system for blind people using the beep sound. Their study indicated that though it is effective in avoiding collision by drawing people's attention, it is annoying if the sound went off too frequent.
In addition, the design should take into account the context difference. For example, the social acceptance of using audio feedback may be higher in train stations and shopping mall compared to quieter place like hospital.
Requirement 2: The balance among safety, user autonomy and social capability need to be considered with care. In general, the level of assistance should be based on the user's capability and the environment. In crowds, there is a preference towards higher autonomy while in other situations, users prefer to have more control. This implies an adaptable and modifiable design would be desirable. Adding social features to the wheelchair could help to achieve smooth and socially accepted maneuverers, but it should be based on user preference and allow user intervention when needed. As such technique is still challenging, a simple human-following function could also be helpful.
One of the most distinctive features of an intelligent wheelchair is its autonomy. In general, state-of-art intelligent wheelchairs are classified into full-autonomy [6], [7] or shared-controlled [3], [8]. The latter was proposed as previous studies indicated a need for users to feel in control of their wheelchair instead of feeling being driven like a cargo.
In this study, our finding is consistent with previous research in the sense that most wheelchair users expressed the desire to have more user autonomy in a simple environment and think a certain amount of assistance can be helpful. They also agreed that the level of autonomy should depend on the user's capability and the scenario [9], [10].
Different from previous studies where the intelligent wheelchair navigates in a simple environment, our study focusses on navigation in crowds. Learning from state-of-the-art research on robot social navigation, the decision-making process involves more than reactive collision avoidance, but also pedestrian trajectory prediction and social norm understanding [11], [12]. When it comes to the context of a wheelchair, these requirements also seem necessary as they are consistent with the natural action of expert wheelchair users when they use their wheelchairs in crowds. Unlike a robot, the intelligent wheelchair involves a user in the decision loop, which leads to a question: Whether the system should do more than simple collision avoidance or do we leave these high-level requirements to the user? In other words, should an intelligent wheelchair have the capability to navigate socially, or it is better to leave this decision to the user? Although our findings suggested a preference towards the former option, we believe it should be designed with care and some simple social features such as "people following" could be used as a starting point.
Requirement 3: Towards an ethical intelligent wheelchair, the system should have human-level decision-making ability, be able to communicate its decision to the user as well as surrounding pedestrians.
Our findings suggested that in a shared-control mode, the disagreement between the user and the onboard intelligence could lead to user and pedestrian confusions, which may even cause consequences such as misunderstanding and loosing trust in the system. In the case of autonomous vehicle, Shariff et al. (2017) suggested that the trust issue is due to the lack of system transparency which can be improved by building communication between the passenger and the vehicle [13]. Similarly, in the case of an intelligent wheelchair, we believe it is essential to build communication between the wheelchair and the surrounding pedestrians, as well as between the user and the wheelchair.
One limitation of such a study is that participants' understanding of an intelligent wheelchair is solely based on our description and the video demonstration. It could be difficult for them to imagine their response without experiencing such a device. For example, a preference for near-full autonomy in crowds may be based on a misconception of how shared control would work in practice. Since most extant examples of shared control involve halting the wheelchair when encountering an obstacle, it may be difficult to envision more modern approaches that produce a smooth trajectory through a crowd.
CONCLUSION
By involving expert wheelchair users in this study, we identified potential challenges and design requirements of a "crowd-navigable intelligent wheelchair". Despite generally optimistic views of what intelligent power wheelchairs could achieve, users emphasised three challenges including increasing pedestrian awareness, a suitable level of assistance which balances safety, user autonomy and social capability, as well as developing an ethical wheelchair. While prescription guidelines mean that direct control on traditional power wheelchairs may not be feasible for patients with some impairments, we believe this has clear implications and offers opportunities for the next stage of intelligent wheelchair design.
REFERENCES
- R. C. Simpson, 'Smart wheelchairs: A literature review', J. Rehabil. Res. Dev., vol. 42, no. 4, p. 423, 2005, doi: 10.1682/JRRD.2004.08.0101.
- T. Carlson and Y. Demiris, 'Human-wheelchair collaboration through prediction of intention and adaptive assistance', in 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, May 2008, pp. 3926–3931, doi: 10.1109/ROBOT.2008.4543814.
- C. Ezeh, P. Trautman, D. Louise, V. Bureau, M. Babel, and T. Carlson, 'Probabilistic vs linear blending approaches to shared control for wheelchair driving', IEEE Int. Conf. Rehabil. Robot. Proc., vol. 2017, pp. 835–840, Jul. 2017, doi: 10.1109/ICORR.2017.8009352.
- Qinan Li, Weidong Chen, and Jingchuan Wang, 'Dynamic shared control for human-wheelchair cooperation', in 2011 IEEE International Conference on Robotics and Automation, May 2011, pp. 4278–4283, doi: 10.1109/ICRA.2011.5980055.
- V. Braun and V. Clarke, 'Using thematic analysis in psychology', Qual. Res. Psychol., vol. 3, no. 2, pp. 77–101, Jan. 2006, doi: 10.1191/1478088706qp063oa.
- R. C. Simpson and S. P. Levine, 'Automatic adaptation in the NavChair Assistive Wheelchair Navigation System', IEEE Trans. Rehabil. Eng., vol. 7, no. 4, pp. 452–463, Dec. 1999, doi: 10.1109/86.808949.
- B. Kim and J. Pineau, 'Socially Adaptive Path Planning in Human Environments Using Inverse Reinforcement Learning', Int. J. Soc. Robot., vol. 8, no. 1, pp. 51–66, Jan. 2016, doi: 10.1007/s12369-015-0310-2.
- C. Urdiales et al., 'An Adaptive Scheme for Wheelchair Navigation Collaborative Control', Jan. 2008.
- R. H. Wang, A. Korotchenko, L. H. Clarke, W. Ben Mortenson, and A. Mihailidis, 'Power mobility with collision avoidance for older adults: User, caregiver, and prescriber perspectives', J. Rehabil. Res. Dev., vol. 50, no. 9, pp. 1287–1300, 2013, doi: 10.1682/JRRD.2012.10.0181.
- P. W. Rushton et al., 'The potential impact of intelligent power wheelchair use on social participation: perspectives of users, caregivers and clinicians', Disabil. Rehabil. Assist. Technol., vol. 10, no. 3, pp. 191–197, May 2015, doi: 10.3109/17483107.2014.907366.
- J. Shabbir and T. Anwer, 'A Survey of Deep Learning Techniques for Mobile Robot Applications', ArXiv180307608 Cs, Mar. 2018, Accessed: Mar. 11, 2021. [Online]. Available: http://arxiv.org/abs/1803.07608.
- C. Chen, Y. Liu, S. Kreiss, and A. Alahi, 'Crowd-Robot Interaction: Crowd-aware Robot Navigation with Attention-based Deep Reinforcement Learning', ArXiv180908835 Cs, Feb. 2019, Accessed: Mar. 11, 2021. [Online]. Available: http://arxiv.org/abs/1809.08835.
- A. Shariff, J.-F. Bonnefon, and I. Rahwan, 'Psychological roadblocks to the adoption of self-driving vehicles', Nat. Hum. Behav., vol. 1, no. 10, pp. 694–696, Oct. 2017, doi: 10.1038/s41562-017-0202-6.