Brooke A. Hingtgen BS1, John R. McGuire MD2, Mei Wang PhD1, and Gerald F. Harris PhD1
1Orthopaedic and Rehabilitation Engineering Center, Milwaukee, WI
2Department of Physical Medicine and Rehabilitation, Medical College of Wisconsin Milwaukee, WI
ABSTRACT
A three-dimensional (3D) biomechanical model of the upper extremity was developed for quantification of stroke rehabilitation. The work is designed to improve current methods which rely upon qualitative assessment alone. The model will accurately track the 3D Euler angles of the neck, trunk, shoulders, elbows and wrist. Unique segments of this model include the head and the hands. This study examines the development, validation, and application of the upper extremity model. Analysis of the model shows that it is accurate and reliable. This model may aid in the assessment and planning of stroke rehabilitation, and help to decrease recovery time.
KEYWORDS
Kinematics, motion analysis, stroke, rehabilitation, upper extremity
BACKGROUND
Each year about 750,000 Americans suffer a stroke, two thirds of which are left with residual neurological deficits that persistently impair function (1-3). Appropriate treatments may be effective in uncovering latent movement patterns to maximize recovery (4). Established motor impairment scales, such as the Fugl-Meyer, may be insensitive to small changes in impairment and are not designed to measure functional use (5). Several studies have examined reaching tasks in stroke subjects, but very few quantify upper extremity motion (6). The existing models lack three-dimensional (3D) Euler rotation calculations (4, 7, 8) necessary for accurate quantification and are often applied to small sample populations.
Accurate evaluation of stroke rehabilitation requires quantitative methods. The results of this work may aid in the assessment and planning of stroke rehabilitation. In this study, a multi-segment 3D kinematic model was developed and validated to detect changes in upper extremity joint orientation during stroke rehabilitation. Reaching tasks were the main focus for analysis. The current project seeks to reduce stroke recovery time and increase resulting function.
RESEARCH QUESTION
 |
|---|
The subject of this work is the design and validation of an upper extremity (UE) motion assessment system to track progress during stroke recovery. The goal of this study is to determine if a unique biomechanical model can assess changes in functional motor control and enhance current methods of assessment.
METHODOLOGY
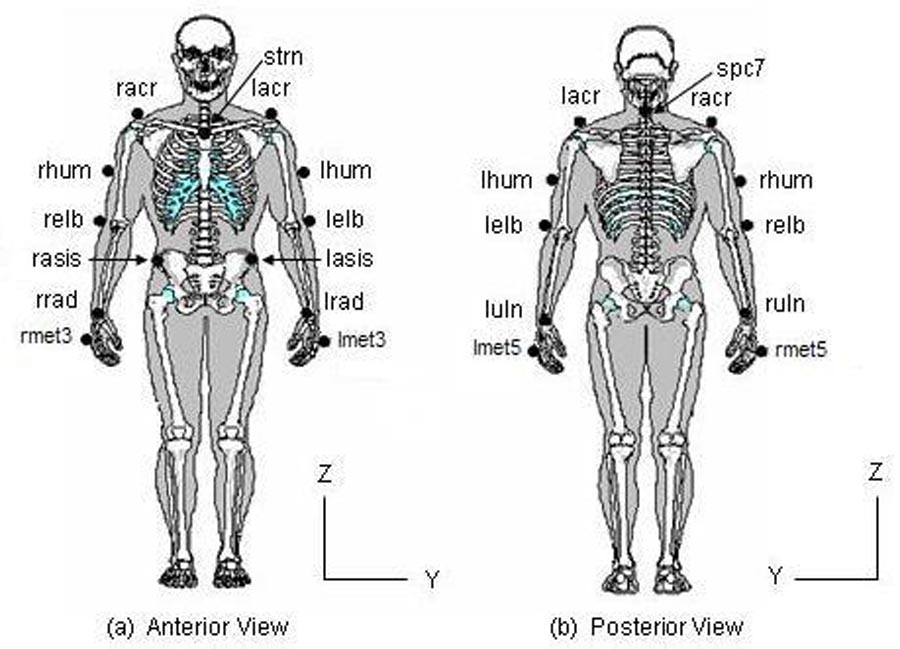
The UE motion model was based on multiple segments: 1) trunk, 2) left upper arm, 3) left lower arm, 4) right upper arm and 5) right lower arm (9, 10). Unique segments include the head and the hand. Twenty-two markers are placed on bony landmarks to define the segments (Figure 1). Four three-degree of freedom joints connect the rigid segments at the neck, elbow, shoulder, and wrist joints.
 |
|---|
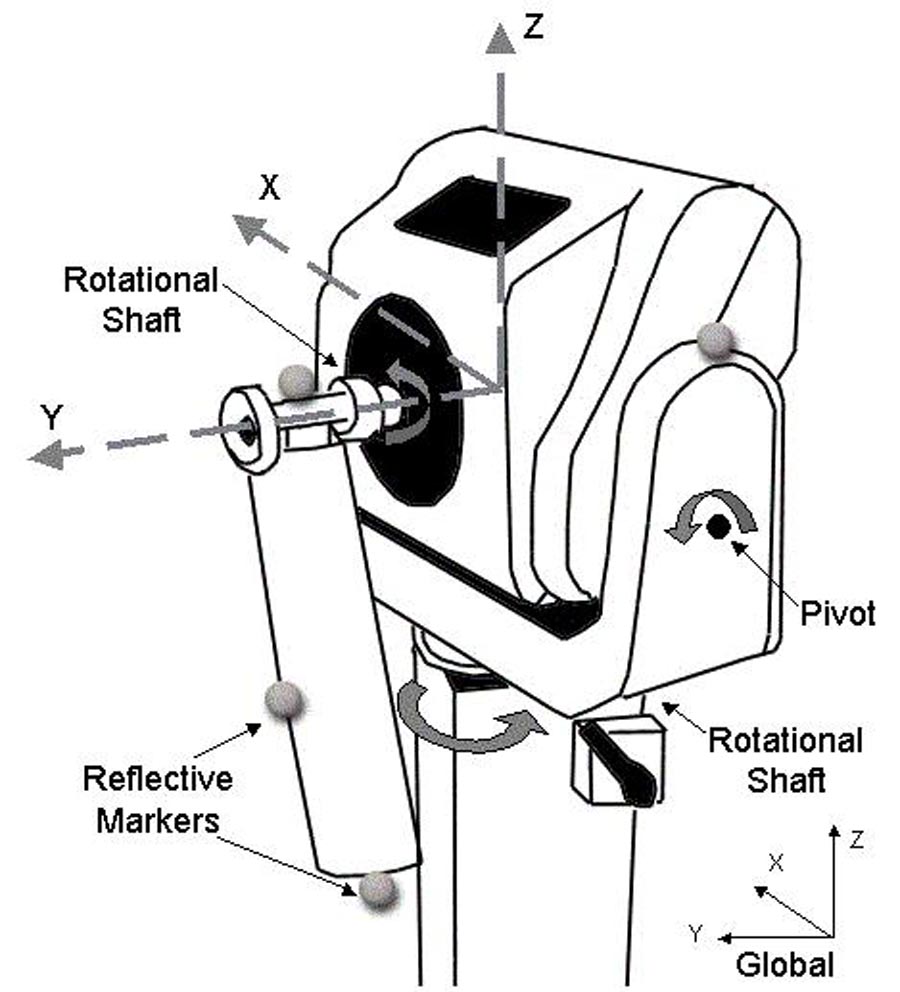
A 15-camera Vicon 524 system (Vicon Motion Systems, Inc., Lake Forest, CA) captured the UE motion patterns at 120 Hz. Joint angles were determined using Euler calculations. Euler rotations, sequenced Y-Z-X, express the joint angles (distal with respect to proximal), utilizing each segment’s local coordinate system. The trunk segment was described relative to the lab coordinate system. Resolution and accuracy of the model was examined statically and dynamically. Static testing used 4 markers placed on a fixed segment (to represent intermarker distances) oriented along the X, Y and Z-axes as marker data was captured. Dynamic angular testing was completed using a Biodex System-3 (Biodex Medical Systems, Inc., Shirley, NY) at speeds of 20, 150 and 300 degrees/sec. A 3-marker segment was attached to the Biodex arm while 4 markers were placed on the stationary chassis, as shown in Figure 2. The Biodex was oriented along the X, Y and Z-axes for comparison of results.
 |
|---|
Following validation, the UE model was applied to 8 subjects diagnosed with spastic hemiparesis, secondary to a stroke. The biomechanical protocol included target-reaching tasks while subjects were seated at a table. Affected and unaffected arms were included for comparison purposes. Newest segments, head and hand, were tested with a control subject.
RESULTS
Validation results of average static linear, dynamic linear and dynamic angular resolution and accuracy are shown in Table 1 (10). Static resolution was highest in the sagittal plane with an average value of 0.18 mm (p ≤ 0.05). The greatest average accuracy of 99.99% was in the coronal plane. Dynamic resolution and accuracy were 0.62 mm and 99.91% respectively. Angular dynamic validation demonstrated a mean resolution of 2.11 degrees and mean accuracy of 99.85% in the three clinical planes.
| Validation | Resolution | Accuracy |
|---|---|---|
| Static Linear (X-axis) | 0.21 mm |
99.99 % |
| Static Linear (Y-axis) | 0.18 mm |
99.97 % |
| Static Linear (Z-axis) | 0.91 mm |
99.36 % |
| Dynamic Linear | 0.62 mm |
99.91 % |
| Dynamic Angular | 2.11 ° |
99.85 % |
 |
|---|
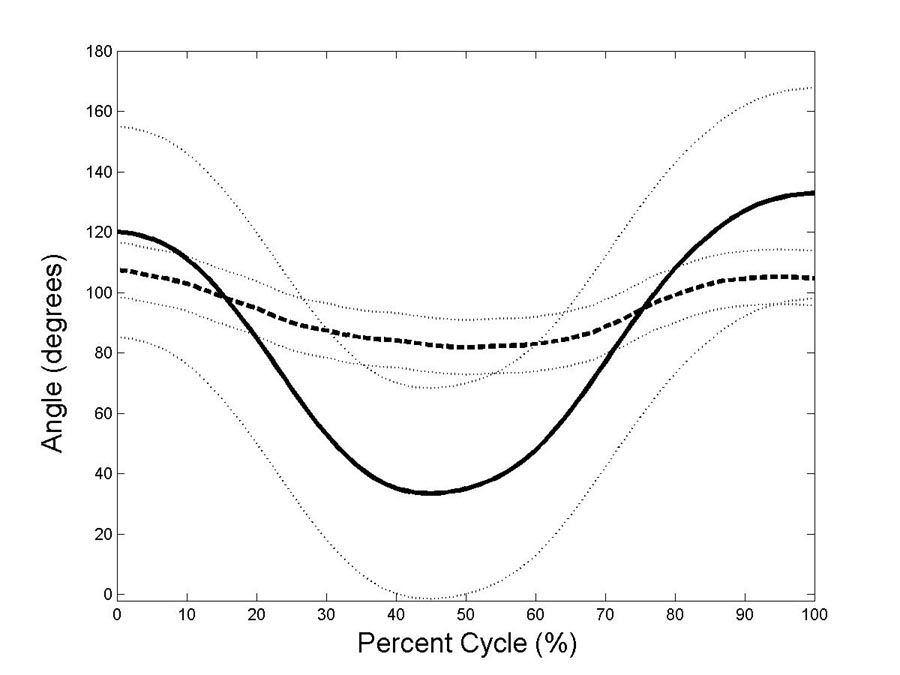
Mean elbow angle for the unaffected and affected arms of the entire population during reaching is presented in Graph 1.
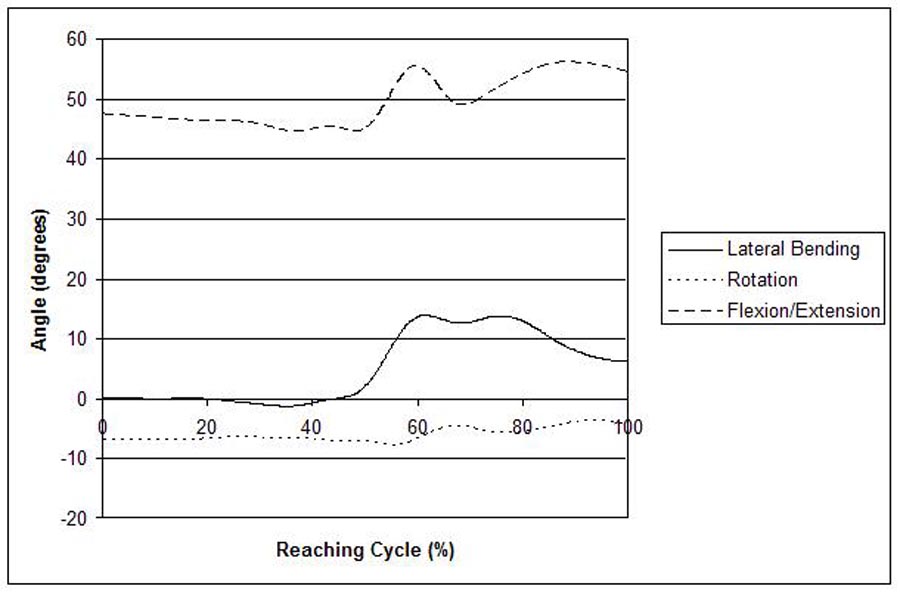
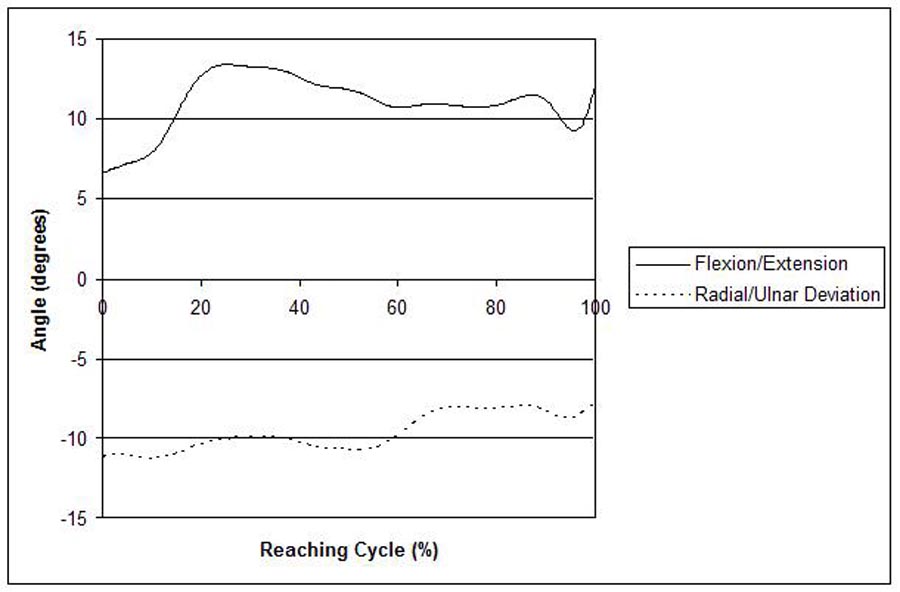
Neck and wrist motion of the normal subject during isolated movements and during reaching is presented in Graph 2 and Graph 3, respectively.
DISCUSSION
 |
|---|
Static and dynamic test results confirm system accuracy and reliability in capturing 3D UE motion. Validation results were greatest in the coronal and transverse planes. The model appears to be effective in detecting changes in upper extremity joint motion. The model displayed dynamic capability for quantifying reaching tasks. Knowledge gained from this study may help design a more effective and streamlined protocol to evaluate UE rehabilitation. Various methods for modeling the hand and head currently exist in the literature (8, 11-13). The models of the hand differ in the number of segments. Therefore, further refinement of the hand is underway to address the needs of other specific populations. Future work involves modeling the metacarpals and phalanges as separate segments.
| Authors | Number of Segments |
|---|---|
| Yang, et al. (2002) | 1 |
| Rab, et al. (2002) | 1 |
| Kuo, et al. (2002) | 5 |
| van der Helm, et al. (2004) | 19 |
REFERENCES
- Gresham, G.E., and Dawber T.R. (1975). “Residual Disability in Survivors of Stroke: the Framingham Study.” N. Engl. J. Med., 293(19):954-956.
- Williams, G.R., Jiang, J.G., Matchar, D.B., and Samsa, G.P. (1999). “Incidence and Occurrence of Total (first-ever and recurrent) Stroke.” Stroke, 30(12):2523-2528.
- Macko, R.F., Haeuber, E., Shaughnessy, M., Coleman, K.L., Boone, D.A., Smith, G.V., and Silver, K.H. (2002). “Microprocessor-Based Ambulatory Activity Monitoring in Stroke Patients.” Med. Sci. Sports Exerc., 34 (3): 394-399.
- Michaelsen, S.M., Lutda, A., Roby-Brami, A., and Levin, M.F. (2001). “Effect of Trunk Restraint on the Recovery of Reaching Movements in Hemiparetic Patients.” Stroke, 32(8): 1875-83.
- Stein J. (2003). “Wearable Sensor Technology for Functional Assessment after Stroke.” IEEE Eng Med Biol Mag. 22(3): 26-7.
- Kamper, D.G., McKenna-Cole, A.N., Kahn, L.E., and Reinkensmeyer, D.J. (2002). “Alterations in Reaching after Stroke and their Relation to Movement Direction and Impairment Severity.” Arch. Phys. Med. Rehabil., 83: 702-707.
- Adamovich, S.V., Archambault, P.S., Ghafouri, M., Levin, M.F., Poizner, H. and Feldman, A.G. (2001). “Hand Trajectory Invariance in Reaching Movements Involving the Trunk.” Exp. Brain Res., 138(3): 288-303.
- Yang, N., Zhang, M., Huang, C., and Jin, D. (2002). “Synergic Analysis of Upper Limb Target-Reaching Movements.” J. Biomech., 35(6): 739-746.
- Hingtgen, B.A., McGuire, J.R., Wang, M., and Harris, G.F. (2004). “Quantification of Reaching during Stroke Rehabilitation using a Unique Upper Extremity Kinematic Model.” Proceedings of 26th Annual IEEE/EMBS Conference, pp. 458.
- Hingtgen, B.A., McGuire, J.R., Wang, M., and Harris, G.F. (2003). “Design and Validation of an Upper Extremity Kinematic Model for Application in Stroke Rehabilitation.” Proc. IEEE/EMBS 25: 200.
- Helm, F.C.T.v.d., Makhsous, M., et al. (2004) "ISB Recommendation on Definitions of Joint Coordinate System of Various Joints for the Reporting of Human Joint Motion-Part II: Shoulder, Elbow, Hand and Wrist." Submitted to J. of Biomech.
- Rab, G., Petuskey, K., and Bagley, A. (2002). "A Method for Determination of Upper Extremity Kinematics," Gait & Posture, 15: 113-9.
- Kuo, L.C., Su, F.C., Chiu, H.Y., and Yu, C.Y. (2002). “Feasibility of Using a Video-Based Motion Analysis System for Measuring Thumb Kinematics,” J. of Biomech, 35: 1499-1506.
ACKNOWLEDGMENTS
This work was funded by The Orthopaedic and Rehabilitation Engineering Center, OREC (Milwaukee, WI) and Allergan, Inc. (Irvine, CA).
Author Contact Information:
Brooke Hingtgen, BS
Marquette University
9200 W. Wisconsin Ave.
Milwaukee, WI, 53226
Office Phone (414) 805-7456
EMAIL: brooke.hingtgen@marquette.edu