Sung Jae Kang, Jei Cheong Ryu ,Gyo Suk Kim, Seung Mun
Korea Orthopedic & Rehabilitation Engineering Center (KOREC)
7-3 Kusan-Dong, Pupuoung-Gu, Incheon, Korea
ABSTRACT
In this study, we wolud be developed the fuzzy controlled PGO that controlled the flexion and the extension of each PGO's hip joint using the bio-signal and FSR sensor.The PGO driving system is to couple the right and left sides of the orthosis by specially designed hip joints and pelvic section. This driving system consists of the orthosis, sensor, control system. An air supply system of muscle is composed of an air compressor, 2-way solenoid valve(MAC, USA), accumulator, pressure sensor. Role of this system provide air muscle with the compressed air at hip joint constantly. According to output signal of EMG sensor and foot sensor, air muscles and assists the flexion of hip joint during PGO gait. As a results, the maximum hip flexion angles of RGO's gait and PGO's gait were about 16˚ and 57˚ respectively. The maximum angle of flexion/extention in hip joint of the patients during RGO's gait are smaller than normal gait, because of the step length of them shoes a little bit. But maximum angle of flexion/extention in hip joint of the patients during PGO's gait are larger than normal gait.
KEYWORDS
Powered Gait Orthosis, EMG, FSR, Gait orthosis, air muscle , fuzzy control
BACKGROUND
It is a challenging task to make the paraplegic walk without the assist of the caregiver. RGO's (Reciprocating gait orthosis) have been introduced to assist the paraplegic to walk. An RGO is consisted of two KAFO's of which torso section on the top portion is a torso section including pelvic band. The patient wearing the RGO pushes the pelvic band backward with his/her trunk and one of leg braces moves forward. Thus he/she has to keep pushing the pelvic band in order to walk. Therefore during the gait with RGO, the energy expenditure is excessively great and the use of RGO is not widely accepted (1)(2)(3)(4).
At KOREC, a prototype of a powered gait orthosis has been developed to reduce the energy consumption and the muscle fatigue compare with RGO . Each hip joint of the PGO is flexed by an air muscle operated by pressurized air enabling the patient to walk. The air muscle behaves like a human muscle and connects one side of the torso section to the upper part of the same side of the brace. The role of artificial muscle is to assist hip flexion during swing phase. Therefore, the patient can walk with less energy expenditure by using a PGO than using an RGO.The PGO a modification of an RGO incorporating two pneumatic muscle actuators(PMA), a compressed air system,pressure and joint angle sensors.
METHOD
 |
|---|
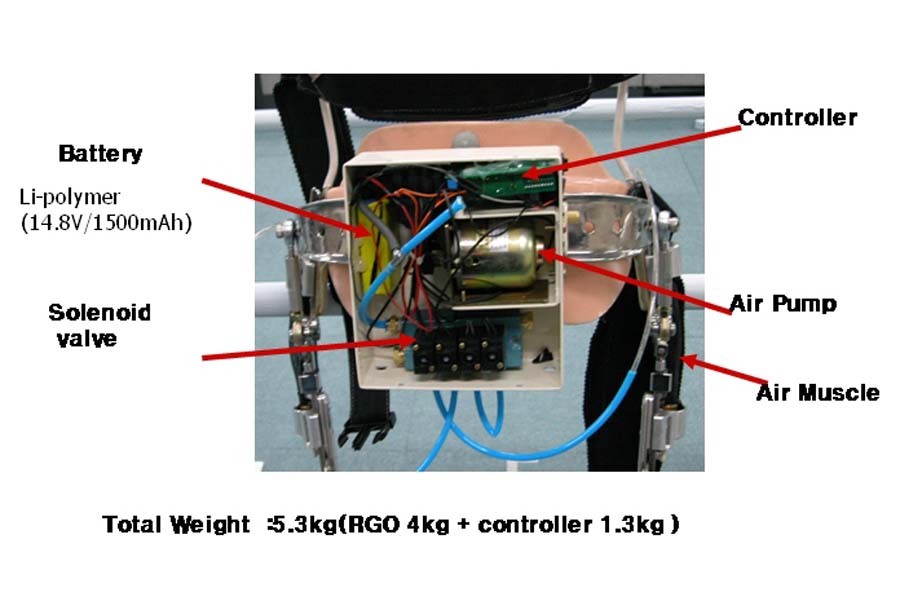
The concept of the PGO driving system is to couple the right and left sides of the orthosis by specially designed hip joints and pelvic section. The driving system of powered gait orthosis(PGO) consists of the orthosis, sensor, control system. An supply system is composed of anair compressor, 2-way solenoid valve(MAC, USA), accumulator, pressure sensor. Role of this system provide air muscle with the compressed air at hip joint constantly (Fig. 1).
PGO which controlled by fuzy algorithm for hip flexion and evaluated in two SCI patients. In addition, hip flexion angles and foot pressure were measured and analyzed for SCI patients who used the developed PGO with the three-dimensional motion analysis system.
RESULTS
 |
|---|
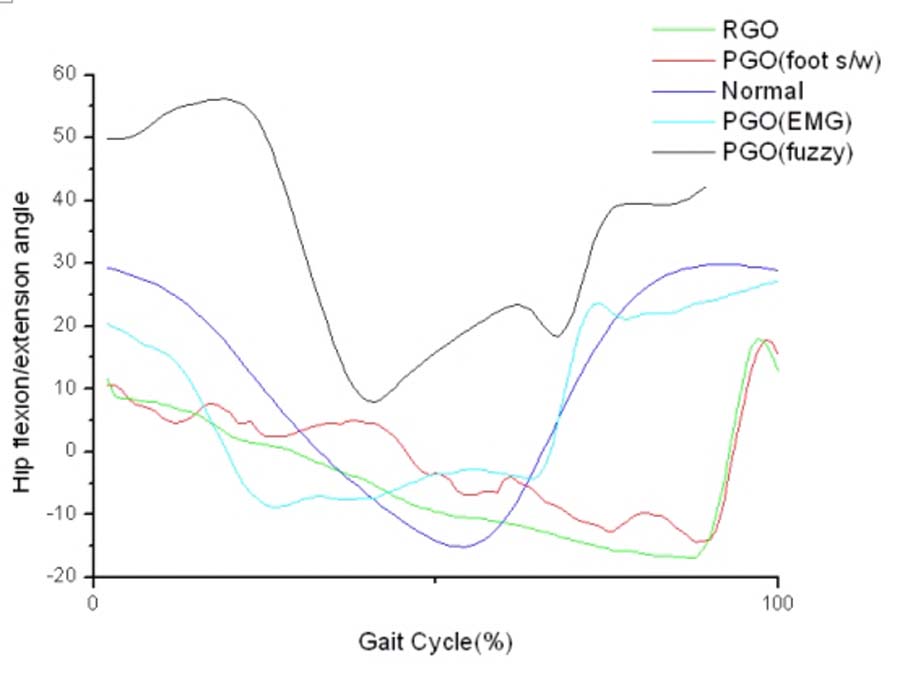
This graph 1 shows the gait characteristics curve of the paraplegic using gait orthosis and the normal person. Here we were conducted the experiments as two kinds of powered gait orthosis(PGO) of fuzzy control and reciprogating gait orthosis(RGO).
As a results, the maximum hip flexion angles of RGO's gait and PGO's gait were about 16 ˚ and 57 ˚ respectively. The maximum angle of flexion/extention in hip joint of the patients during RGO's gait are smaller than normal gait, because of the step length of them shoes a little bit. But maximum angle of flexion/extention in hip joint of the patients during PGO's gait are larger than normal gait.
The hip joint of PGO is flexed by the air muscle attached it. The contraction/relaxation of air muscle occur as the information by signals of EMG sensor and Foot pressure sensor(FSR). We used the fuzzy control method in order to control the air muscle according to step of gait.
Finally, Our PGO's system compare with other gait orthosis is very excellent.
Also the ratio of the duration of the swing phase of fuzzy controlled PGO gait shows 40.4% as an ap ·prox ·i ·ma ·tion to the normal gait. Thus PGO's gait speed was faster than RGO's.
CONCLUSION
We are proposed fuzzy controlled PGO's system using air muscle of hip joints for SCI patients. This PGO controlled by fuzzy controller looks like a excellent device comparative of others. Because the ratio of the duration of the swing phase of fuzzy controlled PGO was similar to the characteristic curve of normal gait. it directly became the causes to increase the gait speed of PGO.
REFERENCES
- Douglas R, Larson PF, DAmbrosia R, McCall RE. ( 1983 ). The LSU reciprocation gait orthosis . Orthopedics.,Vol.6,pp 834-839,
- Solomonow M, Best R, Aguilar E, et al. ( 1997 ). Reciprocating gait orthosis powered with electrical muscle stimulation (RGO II): Part I. Performance evaluation of 70 paraplegic patients. Orthopedics., Vol 20, pp315-324
- Marsolais EB ,Polando G, Lehneis HR, Tashman S. ( 1998 ). Der gang von paraplegikern mit dem hybrid system aus FNS/orthesen Paraplegic walking with hybrid FNS/Orthotic system . Orthopadie Technik, Vol. 49, pp 372-376
- Klute, G. K. , J. M. Czerniecki, and B. Hannaford . ( 1999 ). McKibben Artificial Muscles : Pneumatic Actuators with Biomechanical Intelligence. Proceeding of the IEEE/ASME 1999 International Conference on Advanced Intelligent Mechatronics (AIM’99), Atlanta, GA, Sep 19-22,
ACKNOWLEDGMENTS
This study was supported by a grant of the Korea Health 21 R&D Project, Ministry of Health & Welfare, Republic of Korea. (02-PJ3-PG6-EV03-0004)
Author Contact Information:
47-3 Kusan-Dong
Pupuoung-Gu, Incheon, Korea
Office Phone ( 82 ) 32 - 500-0597
EMAIL: kangsj @ iris.korec.re.kr