Natasha Alves1 and Tom Chau1,2
1Dept. of Electrical Engineering, Inst. of Biomaterials and Biomedical Engineering, University of Toronto
2Bloorview MacMillan Children’s Centre
Toronto, ON, Canada
ABSTRACT
The development of a prosthetic hand capable of mimicking the grasping features of the natural hand will improve the quality of life for below-elbow amputees. This work investigates the existence of a functional relationship between forearm muscle vibratory signals and different functional grips. Simple classifiers were able to distinguish between basic grips with an accuracy of about 75% in one subject. The classification results indicate that a mapping of the vibratory signals to functional grips does exits. Further work is required to investigate if this mapping can be practically exploited for controlling a multifunction prosthetic hand.
KEYWORDS
Prosthesis, mechanomyography, classification, grips
BACKGROUND
People with below-elbow amputations often wear an externally powered upper-limb prosthesis to restore some of the functionality lost by the missing hand. The principal function that a prosthetic hand tries to replicate is grip. Schlesinger [1] classified human prehension postures into six categories, according to the size and shape of objects - pinch, palmar, lateral, hook, spherical and cylindrical.
Currently available externally powered upper-limb prostheses are controlled by electric signals produced during muscle contraction. These signals usually contain simple binary information that merely enables the user to open or close his or her prosthetic hand. Consequently, the user lacks the ability to grasp objects of varying size and shape.
Previous studies have suggested that muscle vibrations can be used as a prosthetic control signal. Muscles emit low frequency vibrations during contraction. This phenomenon is known as the Mechanomyogram (MMG). MMG is the result of the summation effect of propagated motor unit twitches [2]. MMG signals have several characteristics that make it suitable for prosthetic control:
- The magnitude of the MMG signal is linearly co-related to the strength of muscle contractions that are between 20-80% of maximum voluntary contraction [3].
- The MMG signal propagates well through soft tissue.
- Most of the power of the MMG signal is located below 45 Hz for forearm muscles [2].
- The MMG signal may contain clues about deep muscle activity. Previous studies have indicated that it could be used to estimate finger movements [4].
RESEARCH QUESTION
The work presented here attempts to determine if a functional mapping exists between muscle vibrations (MMG) and grips. The existence of such a mapping would potentially open the door to enhanced control and dexterity of a prosthetic hand.
METHOD
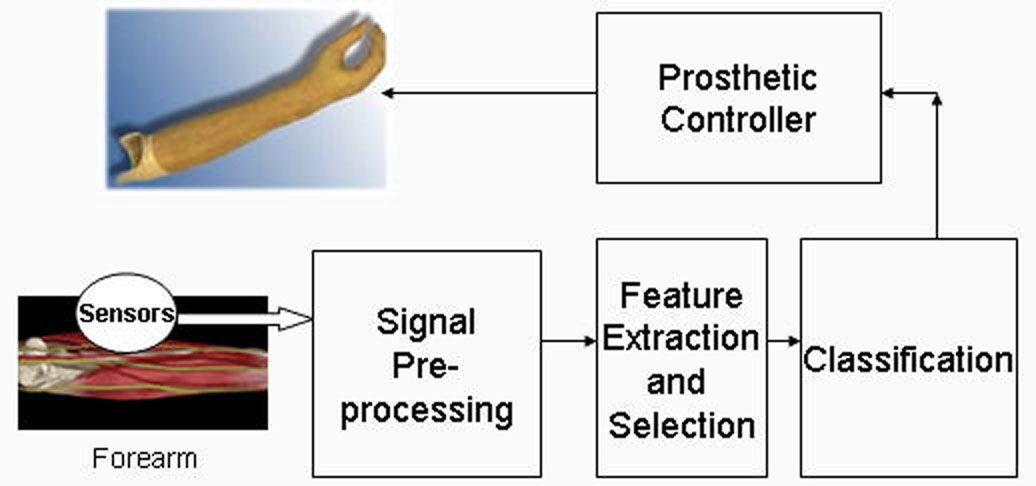 |
The block diagram of the experimental procedure is shown in Figure 2 and detailed below.
1. Signal Acquisition and Pre-Processing
Three sensors, affixed to the subject’s forearm about 5cm distal to the elbow, were used to acquire the MMG signal. Sensors #1 and #2 were placed on the bulk of the flexor and extensor muscle groups. Sensor #3 was placed on the inner forearm in between Sensor #1 and #2. The output of the sensors was fed through a low pass filter, amplified and sampled at 1000 Hz.
In order to ensure that the signals were not affected by muscle fatigue, data were collected in batches of 15-minute sessions. The subject performed each of the six grips 100 times. Data were collected over two seconds for each motion. The subject’s hand was initially at rest and was held in the final position until the end of the sampling period. The steady state MMG signal, obtained with the hand in the final position, was used for grip classification.
2. Feature Extraction
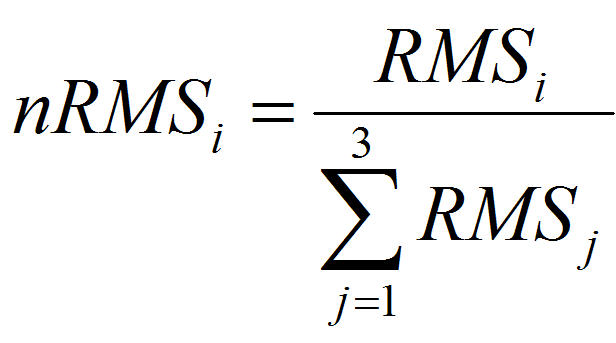
The RMS power of the signal was computed. Since the strength of muscle contraction is not always constant between trials, a normalized RMS [3] was used as input for the classifiers instead of the RMS power. The normalized RMS reflects the relative force of the muscles involved in the contraction. To find the normalized RMS, the RMS value of the i th sensor was divided by the total RMS values over all the sensors.
3. Classification
Linear (Linear Discriminant Analysis/ LDA), piece-wise linear (K-Nearest Neighbours/ KNN), and non-linear classifiers (Gaussian Class-Conditional and Artificial Neural Networks/ ANN) were trained in a supervised manner to distinguish between grips.
RESULTS
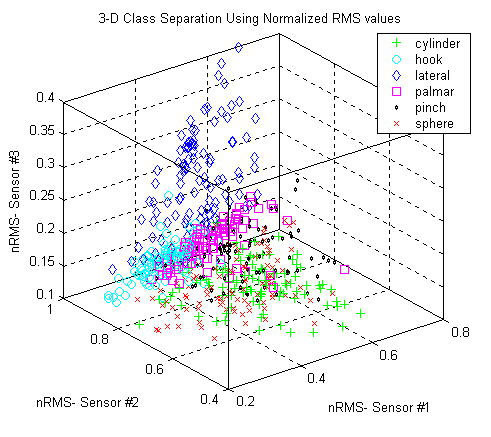 |
The data were first examined visually, as in Figure 3. The features for cylindrical and spherical grip overlapped. Because of the similarity in grip type, the cylindrical and spherical classes were merged for better analysis. The features for the pinch grip overlapped with those of the cylindrical, spherical and palmar grips. The pinch class was therefore ignored.
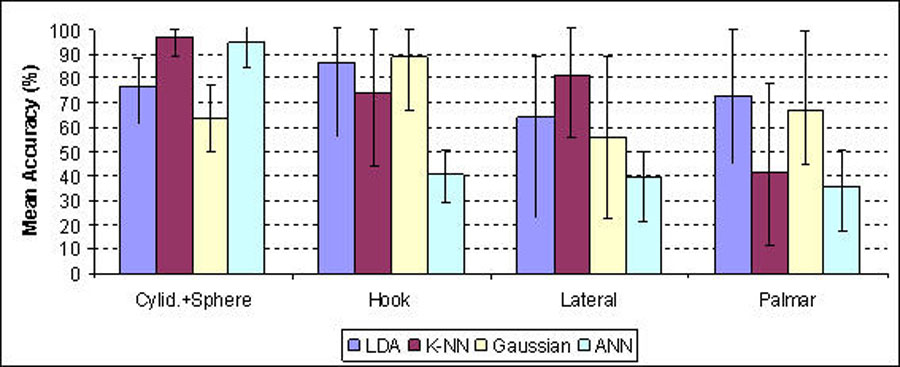 |
Four classification algorithms (LDA, K-NN, ANN and Gaussian classifiers) were compared for the classification results of four grips (palmar, lateral, hook and cylindrical/spherical) using a 2-D feature vector (Sensors #1, #2). The average test accuracies are shown in Figure 4. The median classification accuracies were significantly different (p < 0.05). The best results were obtained by simple classification techniques like LDA and K-NN.
DISCUSSION
The classification results showed that computationally basic linear classifiers, like LDA and KNN, obtained significantly higher accuracies than their more complicated, non-linear counterparts (ANN and Gaussian classifiers), implying that a linear mapping exists between MMG and grips.
Classification accuracies were not significantly improved when a 3-D feature vector (RMS values of Sensor #1, #2, #3) was used instead of a 2-D feature vector (RMS values of Sensor #1, #2). This suggests that just two sensors, placed on the bulk of the flexor and extensor muscle groups, might be sufficient for MMG classification.
The only features under consideration were the normalized RMS values of the three sensors. Classification accuracies might be improved if features that characterize the time and frequency structure of the MMG signal are included.
This work classified the features of the steady state portion of the MMG signal; however, it would be more intuitive to the prosthesis user if the control system could implement a continuous classifier which produces class decisions on a continuous stream of data.
It was illustrated that reasonable accuracies can be obtained for classifying four different categories of grips by implementing fairly simple classifiers. However, a prosthetic hand capable of the functionality of the human hand should be able to re-create single and combinational versions of these grips. More sophisticated classification algorithms and feature extraction methods are needed to investigate if MMG signals can be used to control a prosthesis that mimics all the movements of a natural hand. Although the simple methods used in this project do not provide suitable accuracy for a prosthetic controller, they suggest that a mapping between MMG signal power and functional grip does exits and merits further study.
REFERENCES
- Kyberd PJ, Pons JL, “ A comparison of the Oxford and Manus intelligent hand prostheses.” Robotics and Automation, Proceedings IEEE International Conference, 3 : 3231 - 3236, Sept. 2003
- C Orizio, “Spectral analysis of muscular sound during isometric contraction of biceps brachii.” Journal of Applied Physiology, 68(2): 508–512, 1990
- Silva J, Chau T, “C oupled microphone-accelerometer sensor pair for dynamic noise reduction in mechanomyography signal recording” Electronics Letters, 39(21) :1496-1498, 2003
- Grossman, A, Silva J, Chau T, “ Functional mapping of multiple mechanomyographic signals to hand kinematics.” Canadian Conference on Electrical and Computer Engineering, 1: 493 – 496, 2004
Author Contact Information:
Natasha Alves
Bloorview MacMillan Children’s Centre
150 Kilgour Road
Toronto, Ontario M4G 1R8
Phone (416) 425-6220 x3260
EMAIL: natasha.alves@utoronto.ca