Hassan A. Karimi
Geoinformatics Laboratory, School of Information Sciences, University of Pittsburgh
George J. Zimmerman
School of Education, University of Pittsburgh
ABSTRACT
Imagine needing to learn the location of buildings, classrooms, and other points of interest on a university campus never before seen. While navigation and wayfinding in novel environments are daunting tasks for many, they are especially challenging for individuals who are blind or visually impaired (B/VI) as well as those who use wheelchairs/scooters. Despite today’s ubiquitous use of navigation technology, current navigation systems and services do not fully address the mobility challenges of students and individuals who are B/VI or those who use wheelchairs/scooters. To overcome these barriers faced by these two groups, we present the concept of Personalized Accessibility Location Services (PALS) on a cloud (PALS-Cloud). PALS-Cloud will feature three components: Personalized Accessibility Map (PAM), Social Navigation Network (SoNavNet), and Pedestrian Navigation Service (PNS).
INTRODUCTION
One of the challenges new college students face is becoming familiar with the location of buildings and other points of interest (POIs) on campus not previously seen. Knowing the location of buildings and POIs enables students to select efficient and safe routes to reach those destinations. While traveling they use distal landmarks (e.g., unique buildings or structures) to visually and perceptually monitor their progress as they navigate and wayfind to their destination (Guth, Rieser, & Ashmead, 2010).
Individuals who are B/VI are limited in their travel independence mostly from a lack of and access to information about the environment(s) to be traveled. In the case of new college students who are B/VI, they most often rely on someone from the disability services office, use a map of the campus, explore a tactile map or model of the campus if available, and/or ask a friend or roommate for recommendations about routes to travel to reach various buildings and classrooms. Users of wheelchairs/scooters face similar lack of information barriers, but their challenges are related more to movement barriers (Kirschbaum et al, 2001). They visually search the university website for a map of the campus, as well as ask a friend or roommate for route recommendations, and once selected they monitor their progress visually by keeping track of their location relative to distinct distal landmarks or buildings.
The contribution of this paper is the introduction of a new assistive technology, PALS-Cloud, which can be used by all people, especially by students who are B/VI or use wheelchairs/scooters in university/college campuses, and in any location, be it outdoor (e.g., a campus) or indoor (e.g., a mall). The structure of the paper is as follows. The next section introduces the concept of PALS-Cloud. Three sections follow this: PAM, SoNavNet, and PNS, the three main components of PALS-Cloud. In the last two sections, future research directions and a summary of the paper are provided.
PERSONALIZED ACCESSIBILITY LOCATION SERVICES (PALS) CLOUD
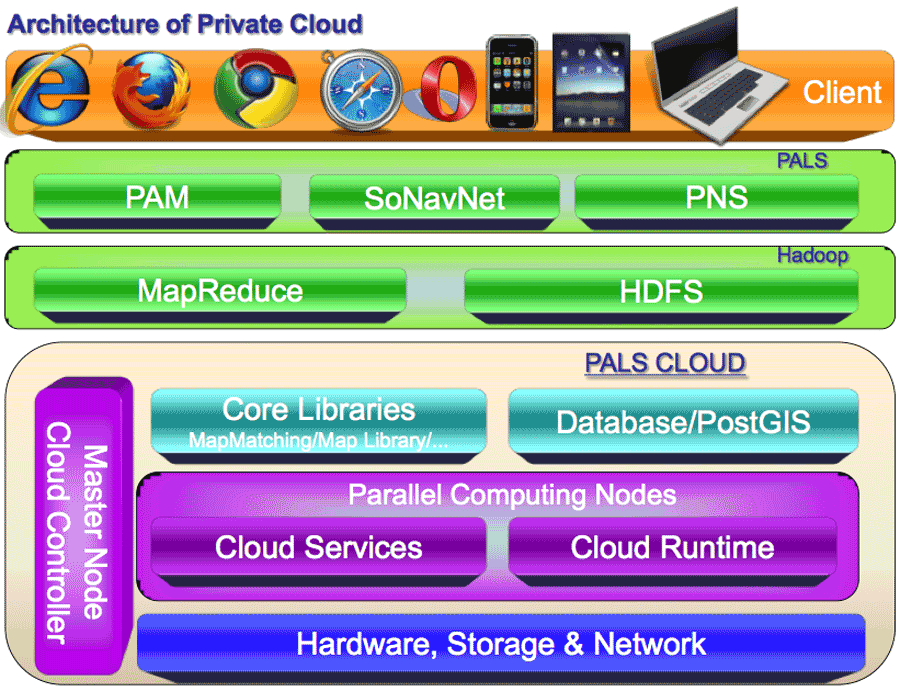 Figure 1. Overall concept of PALS-Cloud
Figure 1. Overall concept of PALS-CloudTo overcome the aforementioned information and movement barriers faced by individuals who are B/VI or those who use wheelchairs/scooters, in this paper we present the concept of PALS-Cloud. PALS-Cloud (Figure 1) is comprised of three components: PAM, SoNavNet, and PNS. Using PALS-Cloud, users can interact with PAM to find accessibility data/information on maps and as users of SoNavNet, they can share their experiences about POIs/routes/directions/obstruction and closures with other users who face similar mobility challenges. They can also share and receive real-time guidance from PNS for travelling on computed/recommended as well as on personalized routes. The key aspect of PALS-Cloud is that it will enable users to acquire accessibility data/information about any novel environment, be it on a new university/college campus, large urban setting, or at an indoor mall.
PERSONALIZED ACCESSIBILITY MAP (PAM)
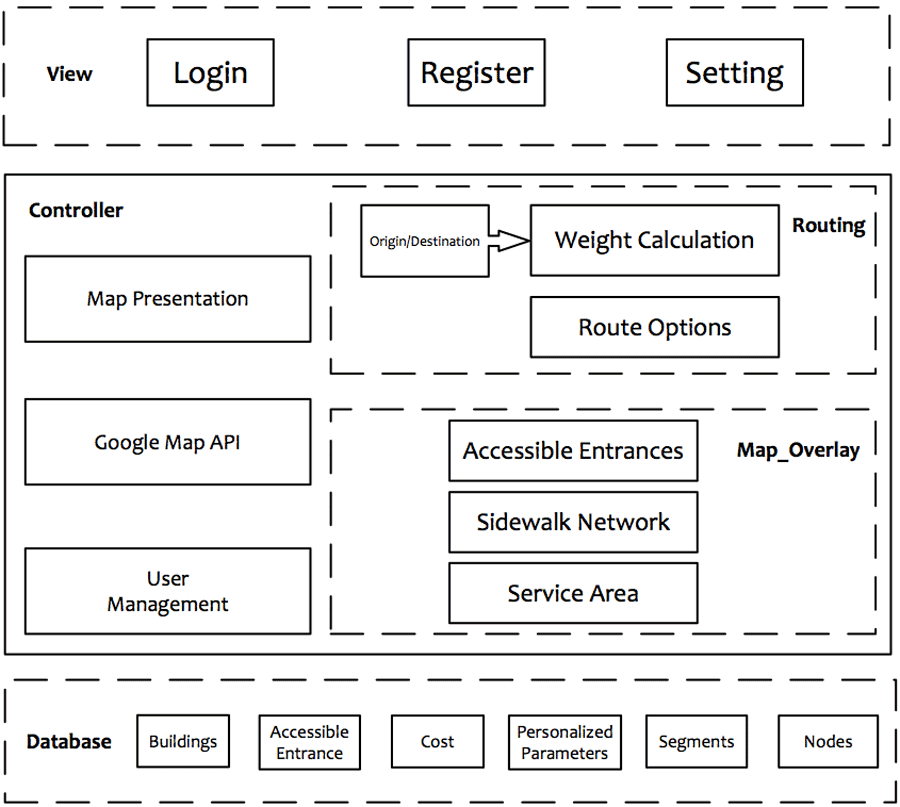 Figure 2. Pitt’s PAM modules
Figure 2. Pitt’s PAM modulesTo better understand PAM and its features, a prototype PAM, which has been developed for the University of Pittsburgh’s (Pitt) main campus based on our research in the Geoinformatics Laboratory in the School of Information Sciences in collaboration with the Disability Resources and Services at Pitt, is discussed. Users of the Pitt’s PAM can locate accessible entrances of campus buildings, find shortest paths between campus buildings, request personalized optimal paths between campus buildings (e.g., a path personalized for individuals who use wheelchairs/scooters) based on their requirements, and find and locate university shuttle buses for travelling between campus locations. Pitt’s PAM modules include a data layer, a control layer, and a view layer (see Figure 2).
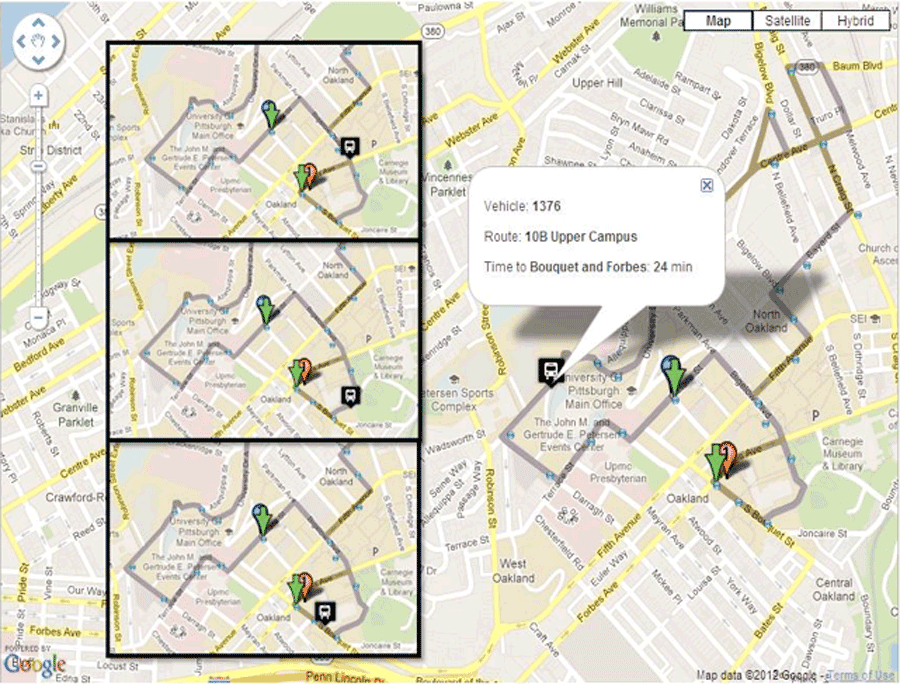 Figure 3. Real-time shuttle bus location
Figure 3. Real-time shuttle bus location It should be noted that the routing module in Pitt’s PAM provides an individual with optimized routes from origin/destination pairs using the underlying sidewalk network. The routing module provides three travel options once a pair of origin-destination locations (buildings on campus) is selected. Two of the options are for walking (shortest path) and using a wheelchair/scooter (personalized route using individual and environmental parameters). To be provided with personalized routes, individuals must input their own routing needs and preferences. Once the needs and preferences are set and a pair of origin and destination is requested, the personalized path will be computed and highlighted on the map. The personalized route is computed by taking into account the weight on each segment in the sidewalk network. The personalized routing in the current version of Pitt’s PAM utilizes some individual preferences and some environmental parameters; see Kasemsuppakorn and Karimi (2009) for details of the individual preferences and environmental parameters used in the algorithm. The third option is taking a shuttle bus that passes through the origin-destination locations; in this option, the nearest bus stops to the origin-destination locations, the route of the selected shuttle bus, and the shuttle’s current location are displayed on the map (see Figure 3).
SOCIAL NAVIGATION NETWORK (SoNavNet)
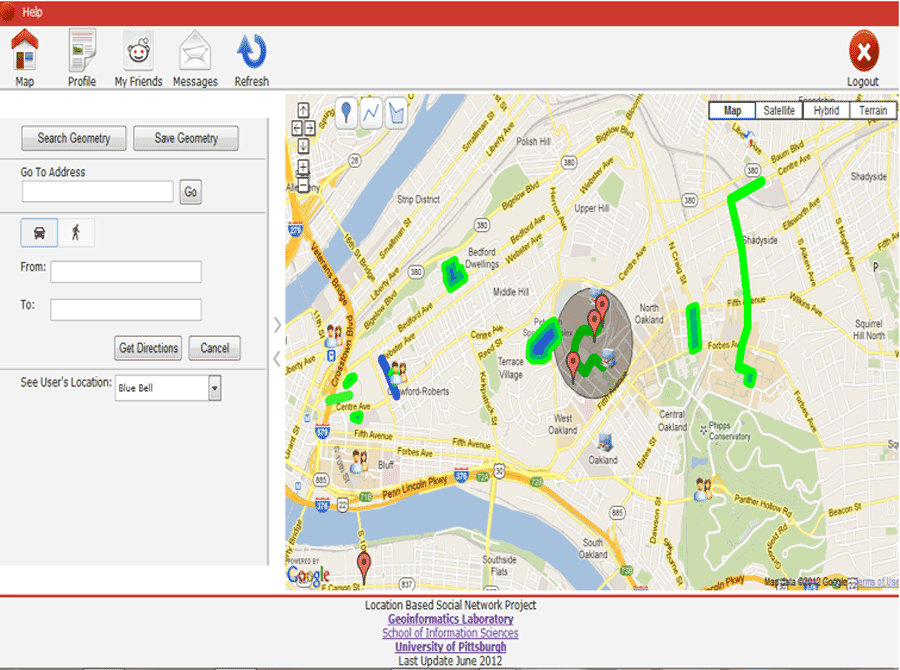 Figure 4. Example screen in SoNavNet showing POIs/routes/areas
Figure 4. Example screen in SoNavNet showing POIs/routes/areasTo better understand SoNavNet and its features, a prototype SoNavNet, which has been developed based on our research in the Geoinformatics Laboratory in the School of Information Sciences at Pitt, is presented. SoNavNet is a location-based social navigation network (LBSN) that can address the navigational needs and preferences of any user, anywhere, anytime (Karimi, Zimmerman, Ozcelik, & Duangdueng, 2009; Karimi, Nwan, & Zimmerman, 2009). SoNavNet has a high potential for assisting individuals who are B/VI as well as those who use wheelchairs/scooters, both indoors and outdoors, by providing a platform for users of SoNavNet to share new, personalized data. Figures 4 and 5 show screen samples of SoNavNet.
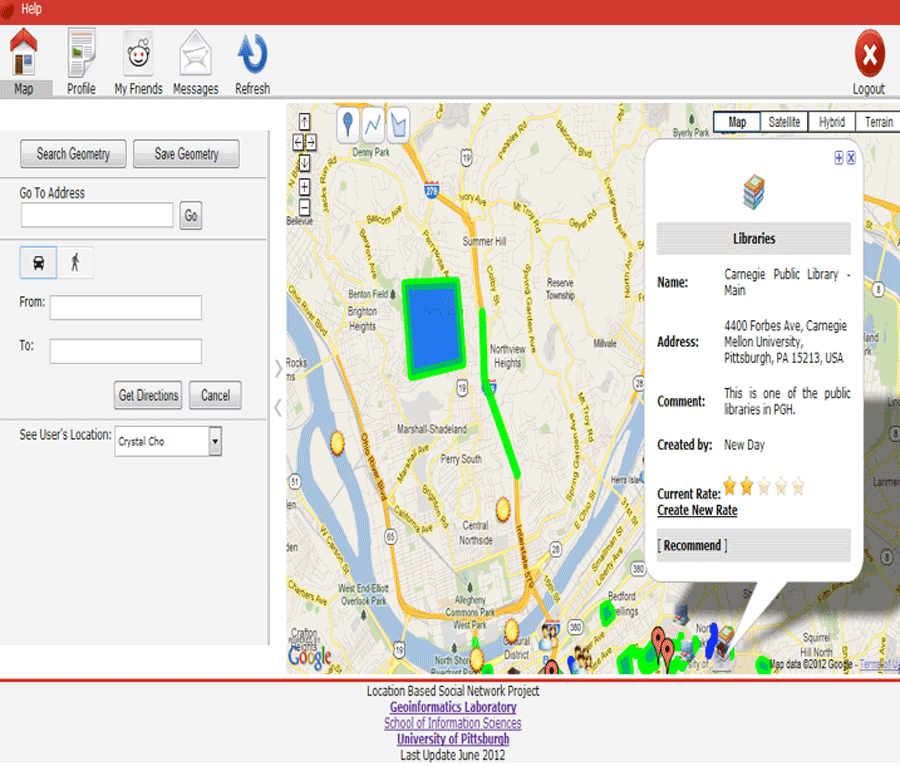 Figure 5. Example screen in SoNavNet showing annotation and recommendation
Figure 5. Example screen in SoNavNet showing annotation and recommendationSoNavNet offers three main functions. The first allows individuals to manipulate a map of their surrounding area and to place POIs, routes, directions, and areas on it, thus letting them trace places they visit and how they get there. The second and third functions are request and recommend services. Members seeking navigation recommendations are able to message their friends with a map on which they can mark off an area and request a POI/route/direction within it.
PEDESTRIAN NAVIGATION SERVICE (PNS)
To better understand PNS and its features, a prototype PNS, which has been developed based on our research in the Geoinformatics Laboratory in the School of Information Sciences at Pitt, is presented. The PNS is focused on providing navigation guidance to pedestrians on walking paths. A pedestrian network, a topological map that explains the geometric relationship between pedestrian path segments, is the key component in any PNS.
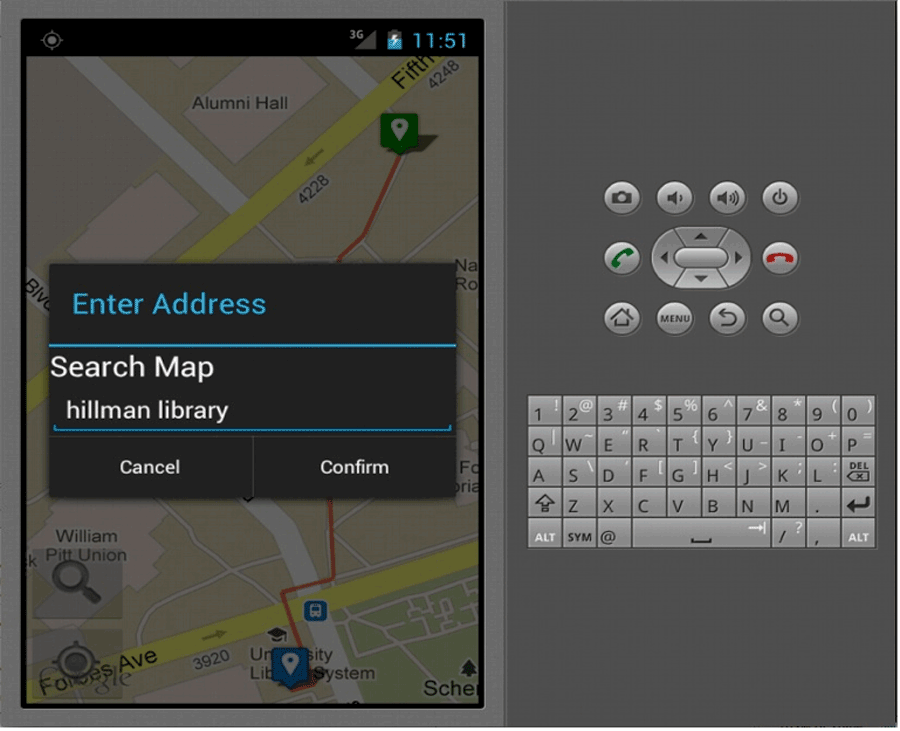 Figure 6. Example PNS screen showing map search.
Figure 6. Example PNS screen showing map search.Other components of our PNS are geocoding, map-matching, routing, and direction. The PNS is based on a client/server architecture where the servers are a map data server (Google Maps) and a server for rendering maps, computing map matching, computing routes, and generating directions. The client is an Android mobile phone which performs the following main functions: obtaining GPS data on the Android device, sending the new GPS data to the server, and receiving a map showing a computed route and the current location. The map-matching module, which uses GPS data and a pedestrian network to map match newly updated GPS data, is based on a chain-coding technique (Ren & Karimi, 2009). The routing module is currently based on shortest distance criterion but the plans are in place to include an option for individuals who are B/VI or use wheelchairs/scooters by taking into account such criteria as shortest distance, minimum barriers, fewest slopes, avoiding bad surfaces, using only controlled crossings, and limited road crossing (Kasemsuppakorn & Karimi, 2009). The directions module presents step-by-step instructions guiding the user to travel on the computed route using both text and audio on the Android phone. Figures 6-7 show example interfaces of PNS.
FUTURE RESEARCH DIRECTIONS
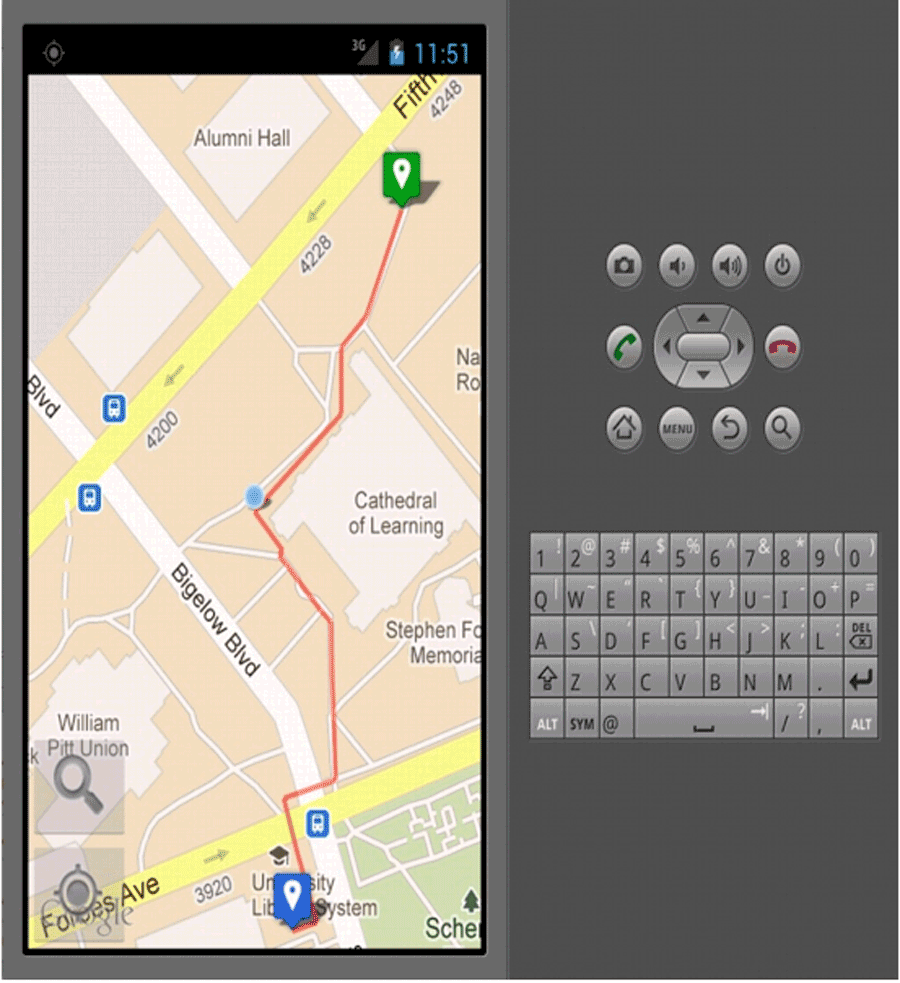 Figure 7. Example PNS screen showing computed route.
Figure 7. Example PNS screen showing computed route.Our future research on PALS-Cloud includes:
- Determination of the base map, i.e., the basic set of accessibility data/information that PAM must contain. We will investigate automatic data collection vs. manual data collection as some PALS data could be collected automatically(collecting data without field visits) and some can only be collected manually (collecting data through field visits).
- Development of appropriate user interfaces to interact with the data/information and maps in PAM. The user interfaces will be designed for specific platforms considering their usage environment (static in desktop/laptop and dynamic in mobile device) and screen size (large on desktops, medium on laptops, and small on mobile devices).
- Development of a map editing function in PAM. Through a map editing function, PALS users will be able to fix, improve, or update accessibility data/information in the database.
- Enhancement of the tagging function in SoNavNet to allow annotations of POIs, routes, and areas by different individuals based on their constraints, needs, and preferences.
- Development of techniques/tools to continually search existing geo-crowdsourcing services and identifying new services as they become available, as well as, procedures to download the required data/information.
- Development of techniques that: (a) convert the heterogeneous data/information types and formats (current geo-crowdsourcing services do not adhere to a specific agreed upon standard type and format) to the underlying data/information type and format supported by the PALS; (b) to integrate the data/information to suitable data schemas supported by the PALS’s database; and (c) populate the PALS’s database with the new data/information.
- Development of algorithms to upload the new available data in the GML environment and store and structure them according to the schemas that will be designed in PostSQL—an open source software that supports geographic objects to PostgreSQL, an object-relational database management system (ORDBMS) available for various platforms including Linux and Microsoft Windows.
SUMMARY
One of the immediate challenges university students who are B/VI or those who use wheelchairs/scooters face is learning the location of buildings, classrooms, accessible entrances, and POIs on an unfamiliar university campus. Accessing the information needed to select efficient and safe routes to get to various destinations on campus may be very time consuming; involving reviewing available tactile or visual maps, requesting assistance from the office of disability services, using GPS technology, and/or obtaining directions/suggestions from a friend, making the individual more dependent than less. Regardless of the method(s) chosen, none provide travelers who are B/VI or those who use wheelchairs/scooters with a level of confidence and independence. Even those routes previously traveled present unforeseen circumstances (e.g., sidewalk closures) that necessitate rerouting to reach the destination.
PALS-Cloud, accessed through a desktop/laptop/smartphone, presents a navigation and wayfinding option from dependence to independence for individuals who are B/VI and those who use wheelchairs/scooters. In addition, being able to choose efficient and safe routes that then can be monitored for unexpected closures in real-time would provide individuals with sensory or physical disabilities, as well as individuals without disabilities new opportunities for employment and socialization..References
Guth, D. A, Rieser, J. J., & Ashmead, D. H. (2010). Perceiving to move and moving to perceive: Control of locomotion by students with vision loss. In W. R. Wiener, R. L. Welsh, & B. B. Blasch (Eds.) (3rd, Vol. 1), Foundations of orientation and mobility: History and theory. (pp. 3-44). NY: AFB Press.
Karimi, H. A., Zimmerman, B., Ozcelik, A., & Duangdueng, R. (2009). SoNavNet: A framework for social navigation networks. In International Workshop on Location Based Social Networks (LBSN’09), Seattle, WA,
Karimi, H. A., Nwan, D., & Zimmerman, B. (2009). Navigation assistance through models or experiences? GIM International, 23(12),
Kasemsuppakorn, P., & Karimi, H. A. (2009). Personalized routing for wheelchair navigation. Journal of Location Based Services, 3(1), 24-54.
Kirschbaum, J. B., Axelson, P. W., Longmuir, P., Mispagel, K., Stein, J. A., & Yamada, D. A. (2001). Designing sidewalks and trails for access: Part 2: Best practices design guide. Washington, DC: Beneficial Design, Inc., Federal Highway Administration.
Ren, M., & Karimi, H. A. (2009). A chain-code-based map matching algorithm for wheelchair navigation. Transactions in GIS, 13(2), 197-214.