iDistanceM: A Real-time Smartphone-based Distance Measurement for the Americans with Disabilities Act Compliance Assessment Tool (ADACAT)
A. K. M. Jahangir A. Majumder1, Sheikh Iqbal Ahamed1, and Roger O. Smith2
1Marquette University, Milwaukee, WI 53233, 2University of Milwaukee- Wisconsin, Milwaukee, WI 53201-0413
ABSTRACT
The measurement kit of the ADA-CAT (Americans With Disabilities Act-Compliance Assessment Toolkit) consists of measurement instruments, such as a measuring tape, a sound level meter, a light level meter, and a magic slope block. Perhaps the most important tool is the measuring tape for length and height measurement as distances are used so prolifically in the ADA assessment process. Currently, ultrasonic sensors are widely used for distance measurement all around the world. In this paper measuring the height and length of an obstacle by using an ultrasonic sensor and a smartphone through Wi-Fi communication is presented. To the best of our knowledge we are the first to use a smartphone with an ultrasonic sensor for measuring length and height through a Wi-Fi network. We have validated our system by conducting two different experiments and found a high degree of accuracy in length measurement. Compared to other existing smartphone-based measurement tools, our application demonstrated the lowest absolute error.
Keywords:
Distance Measurement, Smartphone, Ultrasonic Sensor, Wi-Fi Communication.
INTRODUCTION
Over 50 million Americans have some kind of physical, sensory, cognitive, or mental disability [1]. The American with Disability Act (ADA) of 1990 sets the minimum requirements (minimum door width, staircase slope, etc.) for state and local government facilities, public accommodations, and commercial facilities to be readily accessible to and usable by individuals with disabilities with a view to eliminate architectural barriers for these people [1, 2].
The ADA Measurement Kit consists of a measuring tape, a sound-level meter, a light-level meter, a door force tool, the story stick, the magic slope block, the font guide, the multi-tool, and the key force tool. The measuring tape is used to measure the width of hallways and doors, the height of signage, barriers, and clearances under desks and tables. Our focus is limited to implementing the measuring tape of the Measurement Kit as a smartphone application with a sensor.
With the recent improvements in mobile technology, the cost of smartphones has decreased and their computational capabilities have increased. As self-contained devices, smartphones present a mature hardware and software environment for developing various distance measuring systems for people with disabilities. Smartphone-based distance (length and height) measurement systems can function almost everywhere, since mobile phones are highly portable. Currently, most smartphones now have the capability to observe acceleration, location, orientation, ambient lighting, sound, imagery, etc. [14, 15]. Since integrated sensors along with a mobile platform are ideal for developing an application to measure the length and height, researchers have already developed some smartphone-based distance measuring tool, like Accela Rular [12], Point and Measure, Sonic Ruller [3], ADAMT etc. The Point and Measure system needs to know the height of the phone. The Sonic ruler proposed a smartphone-based measuring tool but it needs a quiet room and a smooth surface.
Low cost and accuracy as well as speed are important in most of the applications. Ultrasound sensors are very versatile in distance measurement as they are inexpensive, and useful across a variety of environments [3] and are quite fast in regards to common applications. In simpler systems a low cost version of Arduino and a Wi-fly shield can also be used with an ultrasonic sensor as a low cost system. Arduino is an open-source single-board microcontroller, descendant of the open-source Wiring platform and the WiFly Shield equips the arduino with the ability to connect to 802.11b/g wireless networks.
This paper reports on a smartphone and an ultrasonic sensor used as the platform for developing a distance measurement system as a replacement of the measuring tape in the ADA measurement kit. To the best of our knowledge, we are the first to use a sensor along with the smartphone to measure the length and height accurately for assessing the architectural barriers of a building. Our major contributions are as follows:
- Proposed a new approach and a novel smartphone based distance measurement system (iDistanceM) for assessing the architectural barriers for the building environment.
- Established a Wi-Fi communication protocol for measuring the distance using smartphone and a sensor. To the best of our knowledge, we are the first to use a smartphone and an ultrasonic sensor to measure the distance with the built in Wi-Fi network for the system.
- Developed a Wi-Fi network (my-adhoc) for the communication between smartphone and ultrasonic sensor.
- The proposed system can reduce the processing time by sending the assessment result through email right after the measurement.
RELATED WORK
T. Mohammad, et al. have implemented a measuring tape as a software application on smartphones with a certain level of accuracy [4]. H. He, et al. had designed a distance measurement device using S3C2410. The temperature compensation module had also been used to improve the precision [5]. Y. Jang, et al. had studied a portable walking distance measurement system with 90% accuracy [6]. C. C. Chang, et al. had studied the ultrasonic measurement system for underwater applications. It used an ultrasonic system, a laser system as well as a camera based system for 3-D position control of underwater vehicles [7]. A new method of timing is described by D. Webster in 1994. He used binary frequency shift-keyed signal (BSFK) which has noise immunity [8].
PRINCIPLES OF iDistanceM
In our system, the ultrasonic sensor is used to measure the distance of an obstacle and then send the measured distance to the smartphone using Wi-Fi communication. Smartphones are useful in this application because they are portable and have sufficient computational power to compute and analyze the distances required in real time. In addition, Wi-Fi connections permit flexible data hosts.
The piezoelectric ultrasonic type of transducer is generally preferred due to its low cost and simplicity to use [5]. The Ultrasonic wave propagation velocity in the air is approximately 340 m/s at an air or atmospheric temperature of 15°C, the same as sonic velocity. To be precise, the ultrasound velocity is governed by the medium and its temperature. Hence, the velocity in air is calculated using the formula below (1).
V= 340+0.6(t-15) m/s t: temperature, °C. |
(1) |
|---|
The distance from the ground of a point of an obstacle is computed as
| D = k.T |
(2) |
|---|
Where,
T![]() f = time of flight of an ultrasonic pulse, i.e, the time the pulse takes to cover the distance D;
f = time of flight of an ultrasonic pulse, i.e, the time the pulse takes to cover the distance D;
k = constant close to 0.5, which depends on the sensor geometry;
V![]() s = velocity of sound in air.
s = velocity of sound in air.
As the measured quantities T![]() f and V
f and V![]() s can be considered uncorrelated, the standard uncertainty u(D) of the measured distance can be obtained from equation (3)
s can be considered uncorrelated, the standard uncertainty u(D) of the measured distance can be obtained from equation (3)
 |
(3) |
|---|
Where υ![]() (V
(V![]() s) and υ
s) and υ![]() (T
(T![]() f) are the standard uncertainties of the velocity of sound and of the time of flight. Arduino is an open-source single-board microcontroller, descendant of the open-source Wiring platform, designed to make the process of using electronics in multidisciplinary projects more accessible [9]. The hardware consists of a simple open hardware design for the arduino board with an Atmel AVR processor and on-board input/output support. The software consists of standard programming. The WiFly Shield equips the arduino with the ability to connect to 802.11b/g wireless networks. The featured components of the shield are a Roving Network's RN-131C wireless module and an SC16IS750 SPI-to-UART chip. The SPI-to-UART bridge is used to allow for faster transmission speed and to free up the arduino's UART [10].
f) are the standard uncertainties of the velocity of sound and of the time of flight. Arduino is an open-source single-board microcontroller, descendant of the open-source Wiring platform, designed to make the process of using electronics in multidisciplinary projects more accessible [9]. The hardware consists of a simple open hardware design for the arduino board with an Atmel AVR processor and on-board input/output support. The software consists of standard programming. The WiFly Shield equips the arduino with the ability to connect to 802.11b/g wireless networks. The featured components of the shield are a Roving Network's RN-131C wireless module and an SC16IS750 SPI-to-UART chip. The SPI-to-UART bridge is used to allow for faster transmission speed and to free up the arduino's UART [10].
EVALUATION OF iDistanceM
To evaluate our proposed system, we developed a prototype application of iDistanceM and examined its performance in several experiments.
Experimental Setup
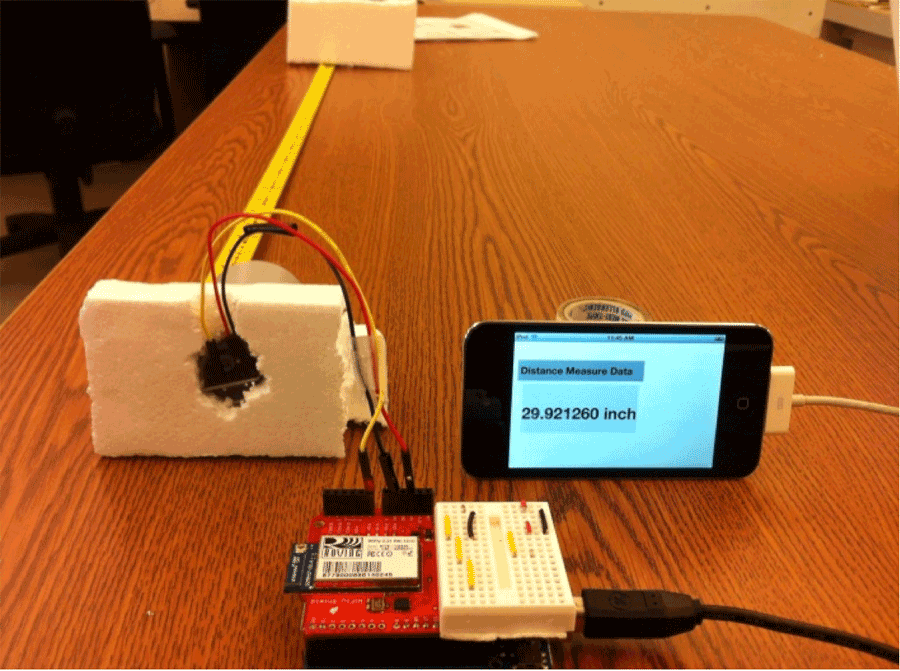 Figure 1. Distance Measurement using iDistanceM System.
Figure 1. Distance Measurement using iDistanceM System.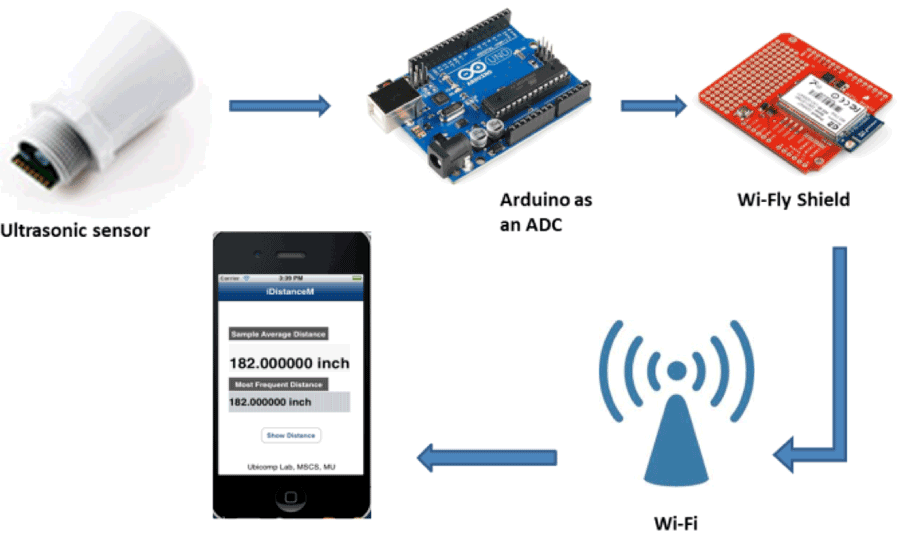 Figure 2. Data Collection Process of iDistanceM
Figure 2. Data Collection Process of iDistanceMMost of the Americans with Disabilities Act (ADA)’s length or height measurements are limited to 5 feet [1]. This smartphone application showed very good accuracy with distances of 5 feet or less. The system consists of a smartphone with an ultrasonic sensor module communicating using a Wi-Fi network. The Wi-Fi module is developed using an arduino and a Wi-fly Shield and has been used for communicating with the system. Figure 1 is the iDistanceM development system. 40 KHz ultrasound sensors have been used for the experiments. The data collection process is shown in figure 2.
Height and Length Measurement
We have developed a prototype application of the iDistanceM system for the iPhone. The screenshots of the iDistanceM prototype application are shown in figure 3. The iDistanceM interface is also shown in this figure which is used to measure distance or for any obstacle of a building’s environment.
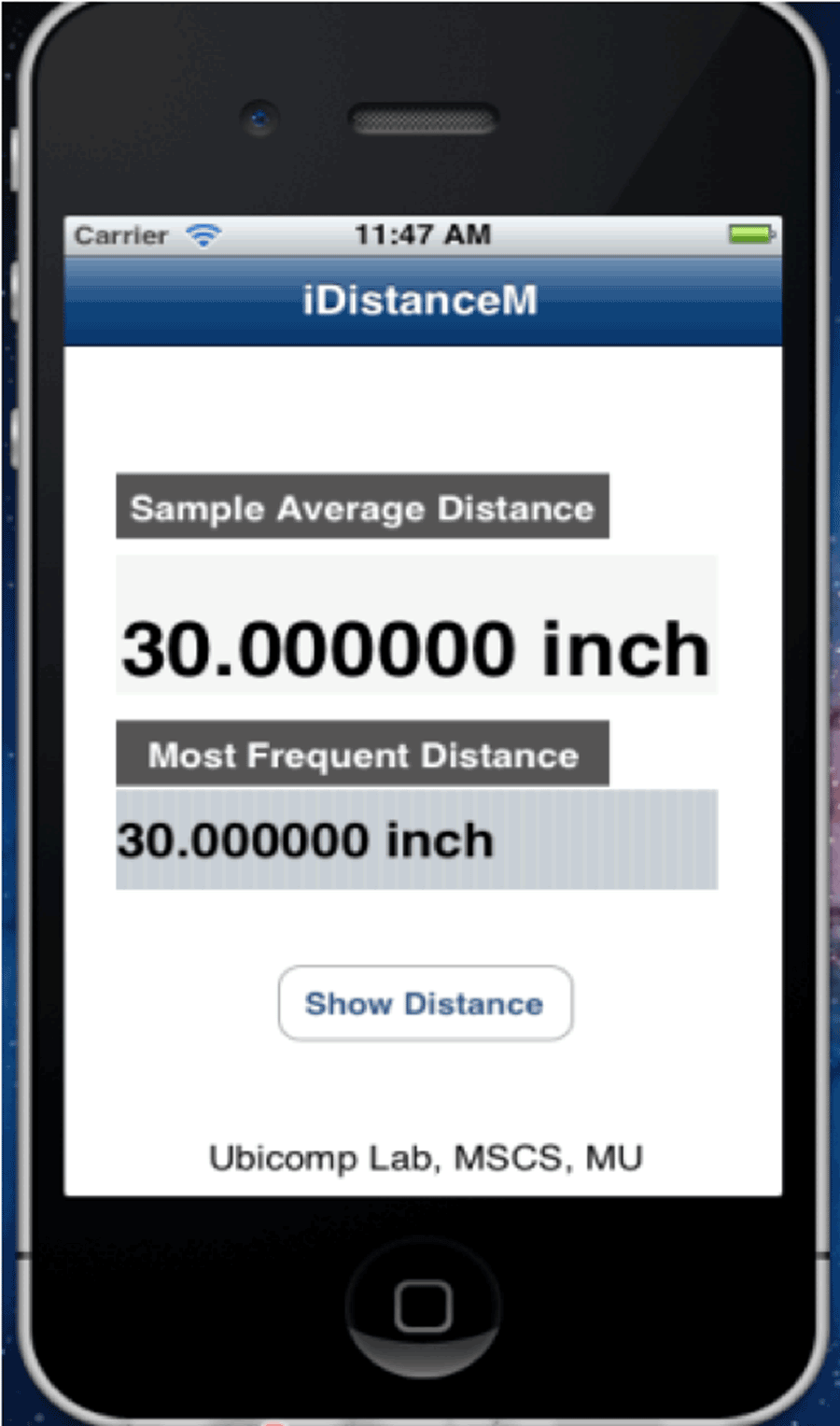 Figure 3. Screenshots of iDistanceM prototype
Figure 3. Screenshots of iDistanceM prototype We processed the measured distance in real time on the iPhone to find the most frequent data using Algorithm 1 with a delay time of 0.3 second. We implemented the Algorithm 1 in objective C.
Algorithm1 Measure Length and Height: Input: Ultrasonic Sensor data; Output: Measured Distance.
- button ← getStatus ()
- if button pressed do
- prepare data acusition from the ultrasonic sensor to arduino
- initialSample ← 0
- for initialSample < m do
- time ← 0
- for time < n do
- a1[time] ← data
- delay for 0.3 sec
- time ← time+1
- end for
- a2[initialSample] ← average(a1)
- initialSample ← initialSample +1
- end for
- compute frequency of each unique data from a2
- display most frequent measured distance
- end if
We collected length and height for different types of buildings (restaurant and a newly constructed building) shown in table 2 and 3.
| Application Name | Method |
Absolute Error |
|---|---|---|
| AccelaRuler [11] | Slide phone: injurious for phone |
3.6’’ |
| Point & Measure [12] | Need to know phone’s height |
4.5’’ |
| Sonic ruler [3] | Need quiet room, smooth surface |
Large |
| ADAMT [4] | Changing with the phone sensors axis, Move in air. |
0.97’’ |
| Our Application (iDistanceM) | Move in the open, easy, portable. |
0.40’’ |
Table1 compares our distance measurement component with available iPhone applications for measuring a distance of up to 70.25 inch.
Result Analysis
First Experiment
The experimental results measured from the first experiment (assessing a restaurant) are shown in Table 2. Fig. 4 shows the graph between actual distance and measured distance.
| Sl. No. | Actual Distance [Inch.] | Measured Distance [Inch.] | Absolute Error | % Error |
|---|---|---|---|---|
1 |
10 |
10.4 |
0 |
0 |
2 |
12 |
12.2 |
0 |
0 |
3 |
15 |
15.2 |
0.2 |
1.33 |
4 |
18 |
18 |
0 |
0 |
5 |
20 |
20 |
0 |
0 |
6 |
25 |
25.2 |
0.2 |
0.8 |
7 |
30 |
30 |
0 |
0 |
8 |
35 |
35.2 |
0.2 |
0.57 |
9 |
40 |
40.4 |
0.4 |
1 |
10 |
45 |
45.2 |
0.2 |
0.44 |
11 |
50 |
50.4 |
0.4 |
0.8 |
12 |
55 |
55.2 |
0.2 |
0.36 |
13 |
60 |
60.4 |
0.4 |
0.66 |
14 |
70 |
70 |
0 |
0 |
Second Experiment
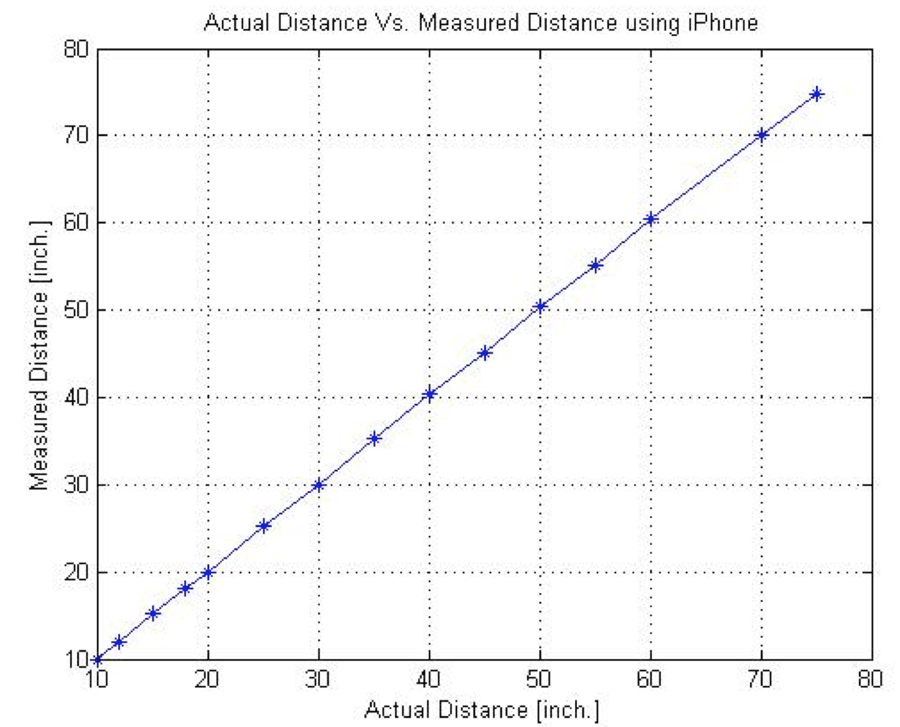 Fig 4: Graph between Actual Distance and Measured Distance for the first experiment.
Fig 4: Graph between Actual Distance and Measured Distance for the first experiment. Following some algorithm revision we measured distances from the second experiment (assessing a newly constructed building). This improved the percent of error of the system. The results show that the corrected measured distance and actual distance are almost linear.
| Sl. No. | Actual Distance [Inch.] | Measured Distance using iPhone [Inch.] | Absolute Error | % Error |
|---|---|---|---|---|
1 |
10 |
10.4 |
0.4 |
4 |
2 |
12 |
12.2 |
0.2 |
1.66 |
3 |
15 |
15.4 |
0.4 |
2.66 |
4 |
18 |
18.0 |
0 |
0 |
5 |
20 |
20.0 |
0 |
0 |
6 |
25 |
25.2 |
0.2 |
0.8 |
7 |
30 |
30.0 |
0 |
0 |
8 |
35 |
35.2 |
0.2 |
0.57 |
9 |
40 |
40.0 |
0 |
0 |
10 |
45 |
44.8 |
0.2 |
0.44 |
11 |
50 |
50 |
0 |
0 |
12 |
55 |
54.8 |
0.2 |
0.36 |
13 |
60 |
60.0 |
0 |
0 |
14 |
70 |
70.0 |
0 |
0 |
Resource Consumption Comparison
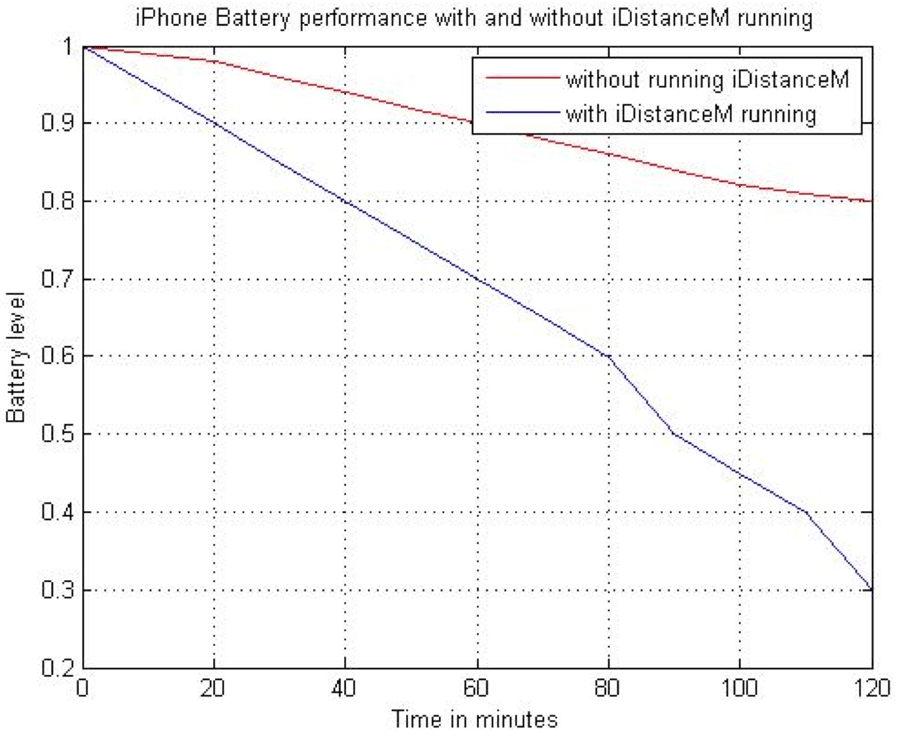 Figure 5. The blue curve presents the battery levels when the iPhone is running with iDistanceM and red curve presents the battery levels when the iPhone is running without iDistanceM
Figure 5. The blue curve presents the battery levels when the iPhone is running with iDistanceM and red curve presents the battery levels when the iPhone is running without iDistanceMTo test power consumption of iDistanceM, we fully charged the iPhone and then monitored the power status continuously for 2 hours for the following two scenarios: (1) the iPhone runs without the iDistanceM application (2) the iPhone runs with the iDistanceM where the application continuously measureddistances. This consumption analysis revealed that if iDistanceM runs normally until the battery power is exhausted, it will last almost 3 hours. We will continue to work on further reducing power consumption.
CONCLUSIONS
To the best of our knowledge, iDistanceM is the first iPhone based application that uses the combination of an ultrasonic sensor and a smart phone with plans to assess the architectural barriers of a building environment. Further testing is needed and one of our future goals is to combine its use into an integrated smartphone application.REFERENCES
- Rhoads, M. A. (2010). The ADA Companion Guide: Understanding the American’s with Disabilities Act Accessibility Guidelines (ADAAG) and Architectural Barriers Act (ABA), John Wiley & Sons, Inc.
- http://www.ada.gov/
- J. David and N. Cheeke, “Fundamentals of ultrasonic waves,” CRC Press, Florida, USA, 2002, ISBN 0-8493-0130-0.
- M. Tanviruzzaman, R. Rizia, S. I. Ahamed, and R. Smith, “Assessing Disability Using Smartphone”, in Proceedings of the Rehabilitation Engineering and Assisstive Technology Society of North America (RESNA) Conference, Baltimore, MD, 2012.
- H. He, and J. Liu, “The design of ultrasonic distance measurement system based on S3C2410,” Proceedings of the IEEE International Conference on Intelligent Computation Technology and Automation, Oct. 2008, pp. 44-47.
- Y. Jang, S. Shin, J. W. Lee, and S. Kim, “A preliminary study for portable walking distance measurement system using ultrasonic sensors,” Proceedings of the 29th Annual IEEE International Conference of the EMBS, France, Aug. 2007, pp. 5290-5293.
- C. C. Chang, C. Y. Chang, and Y. T. Cheng, “Distance measurement technology development at remotely teleoperated robotic manipulator system for underwater constructions,” IEEE International Symposium on Underwater Technology, Apr. 2004, pp. 333-338.
- D. Webster, “A pulsed ultrasonic distance measurement system based upon phase digitizing,” IEEE Transaction on Instrumentation and Measurement, Vol. 43, No. 4, Aug. 1994, pp. 578-582.
- Evans, Martin; Noble, Joshua; Hochenbaum, Jordan (August 28, 2012). Arduino in Action (1st ed.). Manning. p. 300. ISBN 978-1617290244
- https://www.sparkfun.com/products/9954 [Last Accessed: 11th Jan,2013]
- https://itunes.apple.com/us/app/accelaruler/id304167757?mt [Last Accessed: 11th Jan,2013]
- D. Titterton and J. Weston. Strapdown Inertial Navigation Technology. American Institute of Aeronautics and Astronautics, 2nd Edition, 2005.
- P. Aggarwal, Z. Syed, X. Niu, and N. El-Sheimy. “A Standard Testing and Calibration Procedure for Low Cost MEMS Inertial Sensors and Units,” in Journal of Navigation, vol. 61, no. 2, pp. 323–336, 2007.
- Lane, N. D., Miluzzo, E., Lu, H., Peebles, D., Choudhury, T. and Campbell, A. T., “A Survey of Mobile Phone Sensing,” In Proc. of IEEE Communications Magazine, Vol. 48, No. 9, pp. 140-150, 2010.
- Liu, J., Wang, Z., Zhong, L., Wickramasuriya, J. and Vasudevan, V., uWave: Accelerometer-Based Personalized Gesture Recognition and Its Applications, in Proc. of IEEE PerCom, 2009.
ACKNOWLEDGEMENT
This work is supported in part by the Department of Education, National Institute on Disability and Rehabilitation Research (NIDRR), grant number H133G100211. The opinions contained in this paper do not necessarily represent the policy of the Department of Education, and you should not assume endorsement by the Federal Government. The authors also thank Farzana Rahman, Miftah Uddin, Casey O’brien and Colin Ostberg of Ubicomp lab for their suport.