Carole W. Dennis, Sc.D., OTR/L FAOTA1, Sharon A. Stansfield, PhD2, Hélène M. Larin, PhD, PT3, Blacker, B, B.S.1, Butare, J, B.S.1, Jacobi, E., B.S. 1, Kaplan, S., B.S.1
Ithaca College, Ithaca, NY
1Department of Occupational Therapy, 2Department of Computer Science, 3Department of Physical Therapy
abstract
This study compared the ability of infants to learn to direct their movement on a mobile robot with a balance board control interface (the WeeBot) or a joystick. Twenty infants were recruited who were developing typically, and ranged in age from 5 to 9 months; ten infants were assigned to each control interface group. Each infant participated in five robot sessions, which included a three-minute free play period, and a ten-minute driver-training period, followed by a second two-minute free play period. In driver training, infants completed 9 trials where they were offered a toy from three directions at three distances. Infants learned to use the WeeBot interface easily, but performance using the joystick was poor for most infants. Results of this study suggest that for young infants, the joystick may not be a feasible control interface for powered mobility. Alternate control interfaces such as the WeeBot that are intuitive to use may provide more successful learning for very young children with developmental disabilities who have impaired mobility.
Introduction
Infant development occurs at a very rapid pace during the first year of life. Links between independent mobility (through crawling or the use of mobility devices) and the development of perceptual, cognitive, and social and emotional development have been demonstrated across numerous studies with infants who are developing typically (Bertenthal & Campos, 1987; Campos & Anderson, 2000; Thelen 2000). The tremendous functional growth observed in children is matched by structural brain development. Knickermeyer et al. (2008) reported a 240% increase in the cerebellum in the first year of life based on MRI studies of typically-developing infants. Bell and Fox (1996) reported that independent mobility in the form of crawling on hands and knees is accompanied by cortical reorganization in the developing infant’s brain.
Several researchers have reported that the provision of powered mobility to children with motor disabilities may result in greater functional mobility, increased motivation, greater environmental interaction, a more positive affect, greater confidence, increased social contact, and improved communication (Butler, 1986; Deitz, Swinth, & White, 2002; Jones, McEwen, & Neas, 2012). Having limited means to control their environment, young children with disabilities have been described as apathetic and as displaying greater dependence, lack of curiosity and confidence, frustration, and depressed motivation than their peers without disabilities (Nisbet, 1996).
In recent years, researchers have supported the view that powered mobility should be provided as early as is feasible for young children with disabilities (RESNA, 2008). How early is feasible, however, has not been quantified. Powered wheelchairs are not usually prescribed for young children until they are 24 to 36 months of age, and frequently children are even older (Cox, 2003; Lynch, Ryu, Agrawal, & Galloway, 2009). This is long after typically-developing children begin to actively explore their world, possibly limiting the potential for future development.
Several researchers have investigated the use of robotic mobility to potentially allow the use of sophisticated hardware and software to maximize safety and movement potential for infants (Ceres, 2004; Galloway, Ryu, & Agrawal; Lynch, Ryu, Agrawal, & Galloway, 2009; Larin, Dennis, & Stansfield, 2012; Stansfield, Dennis, & Larin, 2012). Much recent work with robotic mobility devices has involved the use of a joystick as the control interface, however, very young children with and without disability have demonstrated difficulty learning to control the direction of their movement with a joystick (Agrawal, Chen, & Galloway, 2011; Chen, Ragonesi, Galloway, & Agrawal, 2011). Larin, Dennis, and Stansfield have investigated the use of a novel control interface that utilizes infants’ upper body leaning to control the direction and movement of a mobile robot. Infants as young as five months of age have demonstrated success using this this control interface, which we call the WeeBot. The purpose of this study is to compare infants’ success in controlling robot movement and direction with the WeeBot or a joystick.
methods
Design
This study used a quasi-experimental two-group design. The study was approved by the The All-College Review Board for Human Subjects Research at Ithaca College.
Participants
Participant inclusion criteria consisted of: age between five and ten months, typical development, weight less than 30 pounds, and an inability to creep on hands and knees. Recruitment notices were sent to parents through two local day care centers and a college campus news bulletin. The first ten participants that were recruited received training in using the robot with the balance board (WeeBot) interface, while the next ten participants recruited were trained using a modified joystick.
Equipment
 Figure 1: Infant using the WeeBot interface
Figure 1: Infant using the WeeBot interfaceWe used a Pioneer P3 DX robot (Adept Mobile Robots, Amherst, NH) equipped with a customized aluminum carriage that provided a secure platform for the control interfaces (joystick and Wii Balance Board) and a Safety 1st Easy Care infant seat. The carriage had six casters, and was designed to fit over the robot. Rigid ethanol foam and industrial strength hook and loop tapes were used to attach the control interfaces and the infant seat to the carriage. The robot had two 19 cm. castor wheels, 500-tick encoders, and a total of 16 front and rear facing sonar sensors to prevent obstacle collision. The robot has a carrying capacity of 23kg. Robot maximum speed was set to 5.2 feet per second; turning speed was determined for each interface to allow quick movement but to prevent jerking or displacing the infant.
The WeeBot control interface used the Nintendo® Wii™ Balance Board, with software developed by one of the researchers. This software compares the data from the four pressure sensors located in each corner of the balance board to respond to infant weight shift. When the infant leans toward a person or object, a sustained weight shift results in the robot moving in the direction of the lean. The system is calibrated to each individual infant at the start of each session to determine the percentage of weight displacement required to signal the robot to move. The WeeBot is shown in Figure 1.
 Figure 2: Infant using the joystick interface
Figure 2: Infant using the joystick interfaceThe joystick control interface was fabricated from a standard Logitech joystick. The neck of the joystick was removed and replaced with a 12” piece of plastic tubing. A miniature tennis ball was attached to the end of the joystick closest to the infant to provide ease of grasp. The joystick was secured between the infants’ legs close to the body in rigid ethanol foam for stability and for the infant’s comfort. The modified joystick is shown in Figure 2. Based upon pre-study trials with infants in our lab, the joystick was configured so that the robot would move in the direction the joystick was pushed (rather than a reversed configuration as was used in studies by Galloway, Ryu, and Agrawal (2008) and Lynch, Ryu, Agrawal, and Galloway (2009).
Measures
Parents completed a demographic questionnaire and the Ages and Stages Questionnaire (ASQ-3) to determine whether infants were developing typically. The ASQ-3 has been shown to have good test-retest reliability, strong internal consistency, and adequate concurrent validity (Squires, Twombly, Bricker, & Porter, 2009).
Driving performance was measured based upon infants’ responses to a request to “Come get the toy” during 9 trials. For each trial, a toy (or other desired object) was offered to the infant from each of tree directions (front, right, left); for each direction, the toys was offered at three distances from the infant (6, 12, and 36 inches). Infants were given a verbal cue upon presentation of each object; if the infant did not respond within 5 seconds, they were given another verbal cue paired with a tactile cue. If no response was given within another 5 seconds, infants were given physical assistance to drive toward the toy. Prompts differed slightly with the two interfaces. The tactile prompt for the WeeBot consisted of the researcher touching the infant’s hand or arm with the toy, while with the joystick the researcher tapped the object onto the top of the joystick. Physical assistance given with the WeeBot consisted of the researcher placing a hand on the infant’s back and gently pushing them toward the toy, while with the joystick the examiner tapped the joystick and pushed it toward the toy. Scoring consisted of the number of trials in which the infant was successful in driving toward and attaining the toy; the infant was considered successful whether the child responded to the verbal cue alone or to the verbal cue paired with a tactile cue.
D. Procedures
Informed consent forms, the ASQ-3, and a demographic form were completed by parents and collected prior to the initiation of the study. All robot sessions were videotaped in a standardized room with a parent or caregiver present. Small lateral foam supports were attached to the sides of the infant seat to provide stability to infants who were not yet able to sit securely. At each session, infants were placed in the infant seat; for infants using the WeeBot, calibration of the balance board was required. Each session consisted of a 3-minute free play period. Initial placement of the infant was at the center of one side of the room, facing two researchers (for infants at the daycare centers) or a researcher and a caregiver at either end of the wall facing of child. Two small, low tables holding several developmentally appropriate toys were positioned next to each of the adults. The caregiver and researchers interacted with objects from a seated position, and spoke to each other and to the infant, but did not encourage the infant to drive toward them during the free play period. The free play period was followed by a ten minute driver training protocol. Once the 9 driving trials were completed, the researcher continued to encourage the infant to travel to objects of interest until ten minutes had passed. Driver training was followed by a second 3-minute free play period.
results
Three males and 7 females in the WeeBot group (mean age 6 mos., 16 days; range 5 mo. 1 day to 7 mos. 22 days). In the joystick group there were eight males and two females (mean age 7 mos. 21 days; range from 5 mos. 26 days to 9 mos. 14 days. The five robot sessions were completed within 5 to 22 days for all infants.
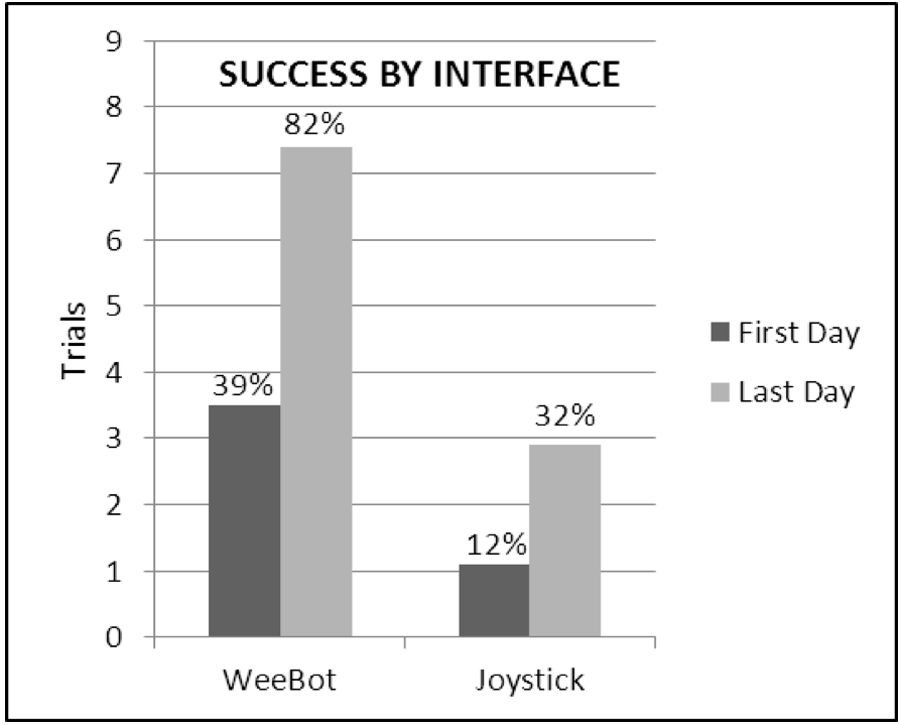 Figure 3: Chart comparing mean success on 9 driver performance trials for the first and fifth day for WeeBot and joystick groups.
Figure 3: Chart comparing mean success on 9 driver performance trials for the first and fifth day for WeeBot and joystick groups.Infants in the WeeBot group were significantly more successful in directing their movement on the robot toward offered toys than infants in the joystick group. Independent t tests indicated that for all nine trials on the first and fifth days, infants in the WeeBot group were significantly more successful than infants in the joystick group on the first day (t (18) = -2.77, p = -0.013) and on the fifth day (t (18) = -4.794, p = .000). As can be seen in Figure 3, mean infant success was greater on the first day’s experience using the WeeBot than was success on the fifth day for infants using the joystick, despite the fact that infants in this group were on average a month older than infants in the WeeBot group.
On the fifth and final robot experience, three infants in the joystick trial had no successful trials on one infant had only one successful trial in driving to toy, while all of the infants using the WeeBot were successful on at least five trials.
discussion
The results of this study provide evidence that for young infants, control of their movement and direction on a mobile robot is significantly more successful when using upper body leaning on the WeeBot than when using a joystick. Findings support earlier research that indicated that infants up to a year of age may learn to drive purposefully using a joystick, but that they are unable to achieve directional driving (Agrawal, Chen, & Galloway, 2011; Chen, Ragonesi, Galloway, & Agrawal, 2011). It appeared that several infants who used the joystick control interface were either unable to grasp that the joystick could control the direction of their movement. Some infants appeared to grow frustrated in their efforts to control the robot movement with the joystick. It may be that the low level of success achieved by infants in the joystick group may have diminished their feelings of efficacy, and lessened their efforts.
References
Agrawal, S. K., Chen, X., & Galloway, C. J. (2010). Training special needs infants to drive mobile robots using force-feedback joystick. Proceedings of the 2010 IEEE Conference on Robotics and Automation , Anchorage, AK, IEEE, pp. 4797-4802, May, 2010.
Bell, M. A., & Fox, N. A. (1996). Crawling experience is related to changes in cortical organization during infancy: Evidence from EEG coherence. Developmental Psychology, 29, 551-561.
Bertenthal, B.L., & Campos, J.J. (1987). New directions in the study of early experience. Child Development, 58, 560-567.
Butler C. (1986). Effects of powered mobility on self-initiated behaviors of very young children with locomotor disability. Developmental Medicine and Child Neurology. 28, 325–332.
Campos, J. J., & Anderson, D. (2000). Travel broadens the mind. Infancy, 1 (2), 149-219.
Ceres, R., Pons, J. L., Calderón, L., Jiménez, A.R. & Azevedo, L. (Nov. - Dec., 2005). A robotic vehicle for disabled children. IEEE Engineering in Medicine and Biology Magazine, 55-63.
Chen, X., Ragonesi, C, Galloway, J. C., & Agrawal, S. K. (2011). Training toddlers seated on mobile robots to drive indoors amidst obstacles. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 19(3), 271-279.
Cox, D. L. (2003). Wheelchair needs for children and young people: A review. British Journal of Occupational Therapy, 66, 219-223.
Deitz, J., Swinth, Y., & White, O. (2002). Powered mobility and preschoolers with complex developmental delays. The American Journal of Occupational Therapy, 56, 86-96.
Galloway, J. C., Ryu, J., & Agrawal, S. K. (2008). Babies driving robots: Independent mobility in very young infants, Journal of Intelligent Service Robotics, 1(2), 123-134.
Knickermeyer et al. (2008). A structural MRI study of human brain development from birth to 2 years. The Journal of Neuroscience, 28(47), 12176-12182.
Larin, H. M., Dennis, C. W., & Stansfield, S.A. (2012). Development of robotic mobility for infants: Rationale and outcomes. Physiotherapy, 98(3), 230-237.
Lynch, A., Ryu, J., Agrawal, S., & Galloway, J. C. (2009). Power mobility training for a 7-month-old infant with spina bifida. Pediatric Physical Therapy, 21, 362-368. DOI: 10.1097/PEP.0b013e3181bfae4c
Nisbet, P., Craig, J., Odor, P., & Aitken, S. (1996). Smart wheelchairs for mobility training. Technology and Disability, 5, 49-62.
RESNA (2008). Position on the application of power wheelchairs for pediatric users. Rehabilitation Engineering & Assistive Technology Society of North America, Arlington, VA: RESNA Press.
Smith, M.D., Dennis, C. W., & Stansfield, S. A. (2010). Infant control of a robotic mobility device. Proceedings of the RESNA 2010 Annual Conference, Las Vegas, Nevada. http://web.resna.org/conference/proceedings/2010/Wheeled%20Mobility/Student%20Papers/SmithM.html
Squires, J., Twonbly, E., Bricker, D., & Potter, L. (2009). ASQ-3 User’s Guide. Baltimore: Paul H. Brookes, 2009.
Stansfield, S.A., Dennis, C.D., & Larin. H.M. (2012). The WeeBot: A novel method for infant control of a robotic mobility device. Published in Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), St. Paul, MN. May 14-18, 2012. http://faculty.ithaca.edu/sstansfield/docs/Publications/ICRA2012.pdf
Thelen, E. (2000). Grounded in the world: Developmental origins of the embodied mind. Infancy, 1, 3-28.Acknowledgements
The authors would like to thank the undergraduate and graduate students who have assisted with earlier portions of this research. Also we thank the parents and infants who participated in this study.