Development of a Virtual Platform for Assessment and Training of Power Wheelchair Driving
Nicholas D. Marchuk1,3 ; Dan Ding2,3 , PhD, Steve Gaukrodger3 , MS
1 Department of Mechanical Engineering, Johns Hopkins University, Baltimore, Maryland; 2 Department of Rehabilitation Science and Technology, University of Pittsburgh, 3 Human Engineering Research Laboratories, VA Healthcare System, Pittsburgh, Pennsylvania
ABSTRACT
A virtual training tool for power wheelchair driving was developed, allowing power wheelchair users to practice operating a power wheelchair safely and efficiently in a virtual environment. The virtual trainer includes simple static scenarios simulating basic driving tasks, and complex dynamic scenarios simulating driving on a sidewalk with virtual pedestrians. Clinicians can alter the virtual scenarios to train specific tasks and can record the training progress.
KEYWORDS
Virtual reality; power wheelchair; training; artificial intelligence
BACKGROUND
Harrison et al. has identified several challenges that power wheelchair users and clinicians face when trying to select and train in a power wheelchair (1). There is no standard procedure for selecting and training in a power wheelchair, forcing clinicians to rely on their previous experiences and the resources available to them. This process is potentially dangerous due to the individual differences in physical conditions and needs. Potential power wheelchair users could be denied if they fail to prove that they are able to safely operate a power wheelchair in a short period of time in a clinic.
A real-world power wheelchair driving test, i.e., the Power-Mobility Indoor Driving Assessment (PIDA) (2), has been devised, which allows clinicians to score the driving effectiveness of a power wheelchair user. This test rates the subject’s abilities in 30 driving tasks, and can be used to evaluate driving performance and identify areas where more training may be required. Virtual reality based systems have also been used to test power wheelchair driving and the effectiveness of virtual training (1). However, a virtual test similar to the PIDA has not been produced, but some aspects of virtual training have been investigated. Webster et al. found that subjects who completed virtual training and could pass a virtual obstacle avoidance driving test out performed a control group that did not use the virtual system (3). Inman et al. used a three scenario approach for virtual wheelchair training, i.e., an empty virtual environment, virtual world surrounded by walls and filled with static objects, and crossing a virtual street. The results of this study suggest the more time spent on the virtual trainer, the better the performance of the subject in the real world (4).
OBJECTIVE
The objective of this study is to develop a virtual training platform that simulates power wheelchair dynamics, and allows wheelchair users to learn and practice power wheelchair driving with a real joystick. The program is designed to record movements and performance metrics, allowing clinicians to examine subjects’ progress with the training scenarios.
METHODOLOGY
The virtual training platform consists of three modules, i.e., static environment module, dynamic environment module, and evaluation and assessment module. The dynamic environment module contains two sub-components, an artificial intelligence (AI) component and a simple representation component. All programming was done with the software package VegaPrime (MultiGen-Paradigm Inc., Richardson TX).
The static environment module allows subjects to explore the movement of the virtual wheelchair in an empty three-dimensional environment or an environment with static objects such as tables. This module accepts the demands from an isometric power wheelchair joystick and simulates the motion of the virtual wheelchair based on the wheelchair dynamics model. Collision detection was implemented to detect wheelchair collisions with the virtual objects.
The dynamic environment module simulates wheelchair driving on a sidewalk among pedestrians, and tests attention and driving capability in complex conditions. The AI component was used to model the steering behaviors (5) of the virtual pedestrians, such as their mass, how close they are grouped together, and how close they follow a path. The simple representation component tests the capabilities of the AI component in a two-dimensional model. The total number of pedestrians and the paths they travel are set and activated. A head-on collision between the wheelchair and a virtual pedestrian stops the wheelchair and forces the pedestrian to pass. If the wheelchair approaches faster from behind a pedestrian, the pedestrian is pushed out to the side. When the pedestrian behavior is set, moving pedestrians with these behaviors are placed in the three-dimensional environment for the subject to interact with.
The evaluation and assessment component records the position and velocity of the virtual wheelchair and virtual pedestrians in a text file. The number of collisions the subject makes, the time to compete a training scenario, and the path used by the subject are also recorded. This data can be used to analyze training effects or as assessment criteria.
RESULTS
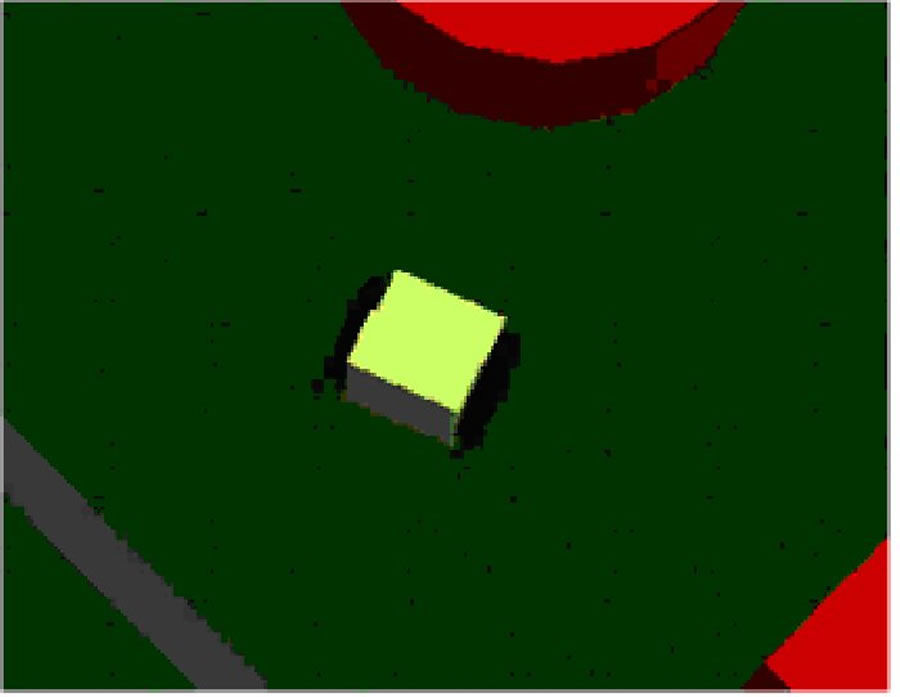 Figure 1: Picture of Static Environment Component. (Click image for larger view)
Figure 1: Picture of Static Environment Component. (Click image for larger view) Figure 1 shows the static environment module where the virtual world can be seen from the driver’s view or from a top-down view. A clinician describes the scenario to the subject, such as “explore the room but avoid colliding with the walls” or “approach the table and stop in front of it.” The motion of the virtual wheelchair is recorded and the clinician may change the parameters of the virtual wheelchair such as maximum wheelchair speed or turning radius for individual subjects.
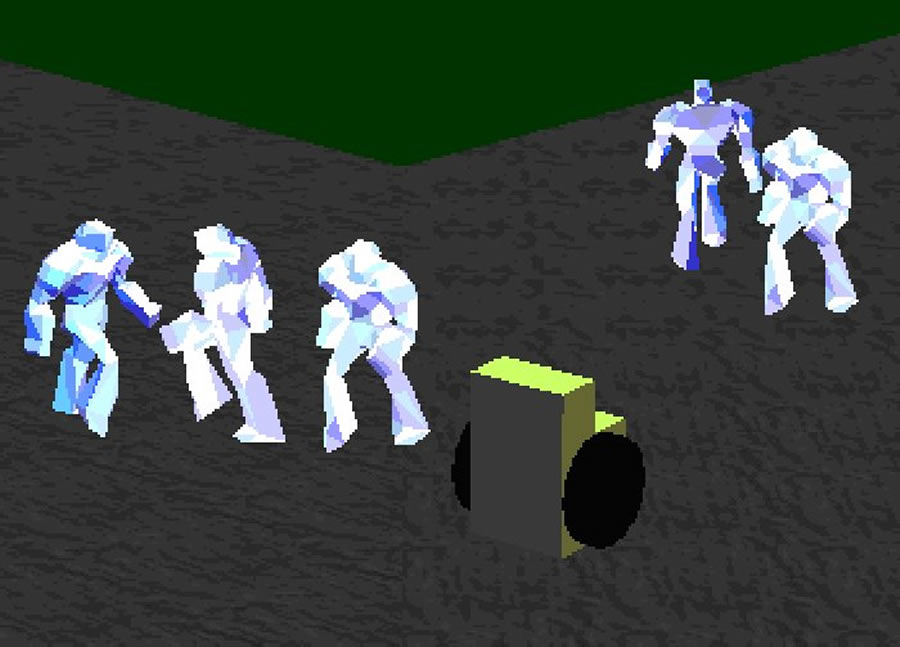 Figure 2: Picture of Dynamic Environment Component. (Click image for larger view)
Figure 2: Picture of Dynamic Environment Component. (Click image for larger view) After becoming familiar with the static environment module, the subject could be trained with the dynamic environment module. The clinician describes the scenario, letting the subject know that pedestrians will be present and move in a life-like manner. The motions of the virtual pedestrians and wheelchair are recorded, and the clinician may change the parameters of the virtual wheelchair or pedestrians. Figure 2 shows the dynamic environment module.
DISCUSSION
The virtual power wheelchair training platform developed in this study can potentially simulate many types of wheelchairs and pedestrian behaviors by using the appropriate parameters. The virtual environment can be designed as complex as the clinician wants to make it, using the static and dynamic environment modules. Clinicians can also easily set up a data acquisition process to assess training effectiveness and performance of subjects.
Virtual environments offer many advantages over their real world training counterparts. Clinical training may offer short durations of practice in limited environments. Using a virtual reality system, a clinician can train a subject in different wheelchairs in diverse environments. Virtual training can also be safely administered and repeated indefinitely. However, before virtual wheelchair training can be widely adopted, several issues need to be addressed. Virtual scenarios should be examined and validated with physical driving tests such as PIDA. The transfer of driving performance from the virtual world to real life world should also be investigated thoroughly.
The platform developed in this study would benefit from the addition of sound and a physics engine for fidelity and immersive effect. A physics engine would track the Newtonian forces on every object in the scenario, so that if the wheelchair collides with a virtual object, the object would move in a proper manner. Future work will include adding more training scenarios, improving rendering performance, and validating virtual scenarios with real-world driving tests.
REFERENCES
- Harrison, A., Derwent, G., Enticknap, A,. Rose, F., Attree, E. (2000). Application of virtual reality technology to the assessment and training of powered wheelchair users. Proc. 3rd Intl Conf. Disability, Page 15-22.
- Hall, K., Partnoy, J., Tenenbaum, S., Dawson, D. (2005). Power Mobility Driving Training for Seniors: A Pilot Study. Assistive Technology, Vol. 17, No. 1, Page 47-56.
- Webster, J., McFarland, P., Rapport, L., Morrill, B., Roades, L., Abadee, P. (2001). Computer-Assisted Training for Improving Wheelchair Mobility in Unilateral Neglect Patients. Archives of Physical Medicine and Rehabilitation, Volume 82, Page 769-775.
- Inman, D., Loge, K., Cram, A. (2000). Learning to drive a wheelchair in virtual reality. Oregon Research Institute Applied Computer Simulations Labs, Page 1-26.
- Reynolds, C. W. (1999). Steering Behaviors for Autonomous Characters. Proceedings of Game Developers Conference 1999, San Jose, California. Page 763-782.
ACKNOWLEDGEMENTS
NSF EEC 0552351 American Student Placements and Internships in Rehabilitation Engineering
AUTHOR CONTACT INFORMATION
Nicholas D. Marchuk
Johns Hopkins University
3501 Saint Paul Street Apt 635
Baltimore MD 21218
Phone: (908) 268-3916
Email: nmarchu1@jhu.edu
Highlights
- Source Ordered
- No Tables
- Very Compatible
Gargoyles
Disney produced a television show in the mid 1990s called Gargoyles. It's a great show and I'm a big fan. A few years ago Disney started to release the show on DVD. The last release was of season 2, volume 1. That was two years ago. Volume 2 has not been released. Why? Poor sales. So if you should find yourself wanting to support my work, instead I ask you pick up a copy of season 2, volume 1. It's a great show and you might find yourself enjoying it.